TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024163582
公報種別
公開特許公報(A)
公開日
2024-11-22
出願番号
2023079327
出願日
2023-05-12
発明の名称
移動システム
出願人
トヨタ自動車株式会社
代理人
個人
主分類
B62D
9/00 20060101AFI20241115BHJP(鉄道以外の路面車両)
要約
【課題】車輪のスタックおよび摩耗を低減する移動システムを実現する。
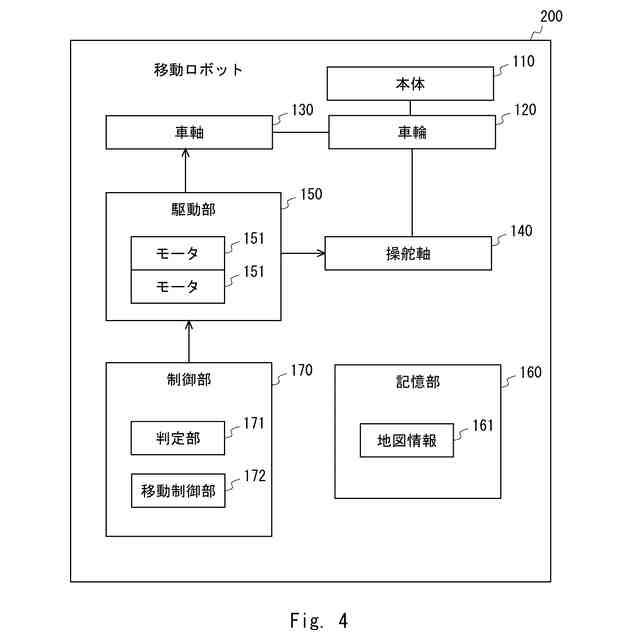
【解決手段】本開示の一形態に係る移動ロボット200は、車軸130周りに回転可能な車輪120を有する。車輪120は、上下方向に延びる操舵軸140周りに旋回可能に支持される。車軸130は、操舵軸140に対して、車軸130の軸方向に垂直な水平方向にずれて配置される。移動ロボット200は、溝または段差の位置を示す地図情報161に基づいて車輪120が溝または段差を超える経路を通過すると判定される場合、車輪120が操舵軸140周りに旋回する旋回角度を所定範囲に制限する。
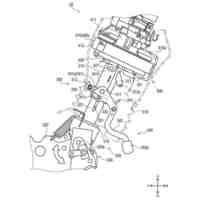
【選択図】図4
特許請求の範囲
【請求項1】
車軸周りに回転可能な車輪を有する移動システムであって、
前記車輪は、上下方向に延びる操舵軸周りに旋回可能に支持され、
前記車軸は、前記操舵軸に対して、前記車軸の軸方向に垂直な水平方向にずれて配置され、
溝または段差の位置を示す地図情報に基づいて前記車輪が前記溝または前記段差を超える経路を通過すると判定される場合、前記車輪が前記操舵軸周りに旋回する旋回角度を所定範囲に制限する
移動システム。
続きを表示(約 500 文字)
【請求項2】
前記所定範囲は、前記溝の深さまたは前記段差の高さに基づいて決定される
請求項1に記載の移動システム。
【請求項3】
前記車軸が前記操舵軸よりも移動方向後側に位置するプッシュモードおよび前記車軸が前記操舵軸よりも移動方向前側に位置するプルモードのうちの一方のモードで前記溝を超える前記経路を通過した後、前記プッシュモードおよび前記プルモードのうちの他方のモードで前記溝を超える前記経路を通過する
請求項1または2のいずれかに記載の移動システム。
【請求項4】
前記車輪が前記溝または前記段差を超える前記経路を通過する前に、前記車輪が前記操舵軸よりも移動方向後側に位置するように前記車輪を前記操舵軸周りに旋回させる
請求項1または2のいずれかに記載の移動システム。
【請求項5】
2つのモータを同時に回転させることで前記車輪を前記車軸周りに回転させ、かつ、前記2つのモータを同時に回転させることで前記車輪を前記操舵軸周りに旋回させる干渉駆動機構を備える
請求項1または2のいずれかに記載の移動システム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、移動システムに関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
特許文献1は、車軸と操舵軸を有し、車軸が操舵軸に対してずれて配置される車両を開示している。
【先行技術文献】
【特許文献】
【0003】
特許第7198445号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
車輪を旋回させるタイミングで溝や段差を通過すると、車輪がスタックしたり、車輪が摩耗したりするという問題がある。
【0005】
本開示は、このような問題点に鑑みてなされたものであり、車輪のスタックおよび摩耗を低減する移動システムを実現する。
【課題を解決するための手段】
【0006】
本開示の一態様の移動システムは、
車軸周りに回転可能な車輪を有する移動システムであって、
前記車輪は、上下方向に延びる操舵軸周りに旋回可能に支持され、
前記車軸は、前記操舵軸に対して、前記車軸の軸方向に垂直な水平方向にずれて配置され、
溝または段差の位置を示す地図情報に基づいて前記車輪が前記溝または前記段差を超える経路を通過すると判定される場合、前記車輪が前記操舵軸周りに旋回する旋回角度を所定範囲に制限する。
【発明の効果】
【0007】
本開示によれば、車輪のスタックおよび摩耗を低減する移動システムを実現することができる。
【図面の簡単な説明】
【0008】
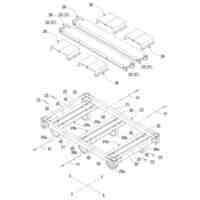
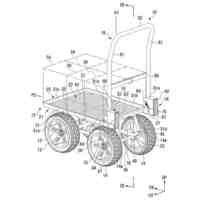
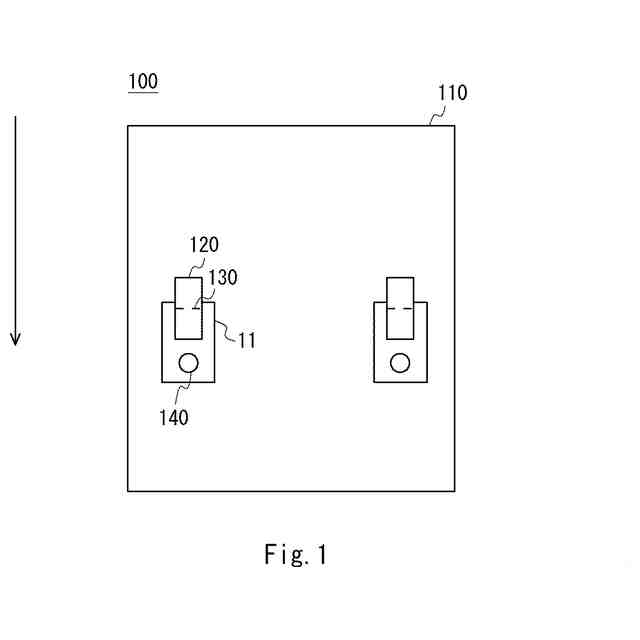
参考例の移動ロボットの下面を示す説明図である。
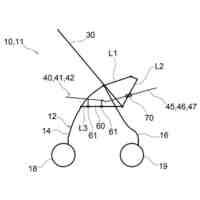
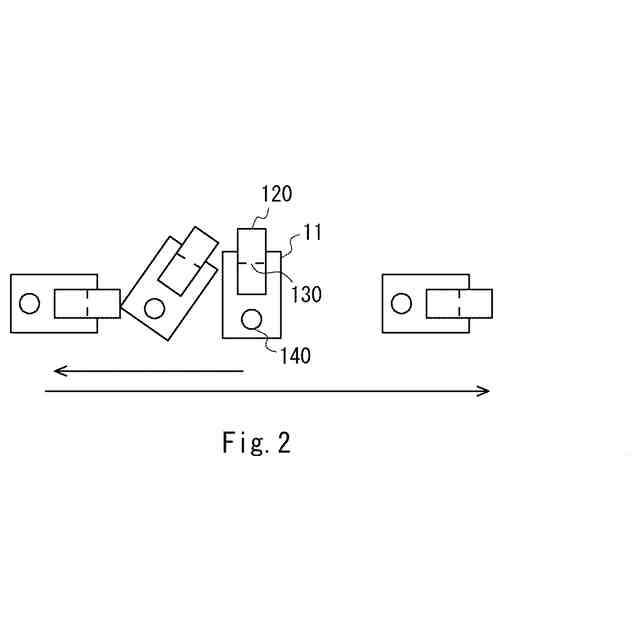
参考例の車輪の動作を示す説明図である。
参考例の移動ロボットの動作を示す説明図である。
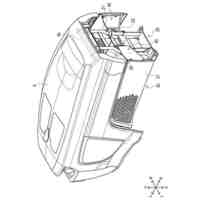
実施形態1にかかる移動ロボットの構成を示す説明図である。
実施形態1にかかる移動ロボットの動作の一例を示す説明図である。
旋回角度の所定範囲を示す説明図である。
【発明を実施するための形態】
【0009】
<参考例>
図1を参照して参考例の移動ロボットについて説明する。図1は、移動ロボット100の下面を示す説明図である。移動ロボット100は、本体110、車輪120、車軸130、および操舵軸140を備えている。
【0010】
本体110は、車輪120を駆動するモータ(不図示)やモータに制御信号を送信する制御装置などを収容する。本体110は、移動ロボット100によって搬送される荷物を収容する収容部をさらに備えていてもよい。移動ロボット100は、搬送ロボットであってもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
発音装置
1か月前
個人
折り畳み自転車
4か月前
個人
電動モビリティ
1か月前
個人
自転車用傘捕捉具
5か月前
個人
自由方向乗車自転車
1か月前
個人
体重掛けリフト台車
4か月前
個人
自転車用荷台
8か月前
個人
キャンピングトライク
2か月前
個人
アタッチメント
5か月前
井関農機株式会社
作業車両
10か月前
個人
自転車用荷物台
5か月前
株式会社CPM
駐輪機
5か月前
個人
ステアリングの操向部材
2か月前
個人
ステアリングの操向部材
8か月前
株式会社三五
リアサブフレーム
4か月前
祖峰企画株式会社
平台車
9か月前
三甲株式会社
台車
7か月前
三甲株式会社
台車
7か月前
豊田合成株式会社
操舵装置
5か月前
ヤマハ発動機株式会社
車両
6か月前
ヤマハ発動機株式会社
車両
6か月前
ヤマハ発動機株式会社
車両
6か月前
学校法人千葉工業大学
車両
3か月前
ダイハツ工業株式会社
車両
6か月前
学校法人千葉工業大学
車両
3か月前
学校法人千葉工業大学
車両
3か月前
ヤマハ発動機株式会社
車両
6か月前
アルインコ株式会社
運搬台車
10か月前
コンビ株式会社
乳母車
6日前
アルインコ株式会社
運搬台車
10か月前
株式会社クボタ
作業車
8日前
株式会社クボタ
作業車
9か月前
株式会社カインズ
台車
4か月前
株式会社クボタ
作業車
9か月前
株式会社オカムラ
搬送用什器
1か月前
株式会社カインズ
台車
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ