TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025020746
公報種別
公開特許公報(A)
公開日
2025-02-13
出願番号
2023124310
出願日
2023-07-31
発明の名称
走行制御装置
出願人
株式会社豊田自動織機
代理人
個人
,
個人
,
個人
,
個人
主分類
B66F
9/24 20060101AFI20250205BHJP(巻上装置;揚重装置;牽引装置)
要約
【課題】フォークリフトにより荷役対象物に対して荷役を行う際に、フォークリフトと荷役対象物との干渉を抑制することができる走行制御装置を提供する。
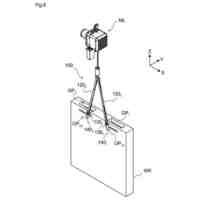
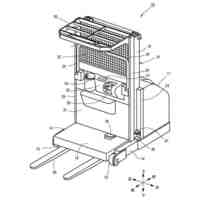
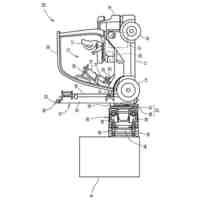
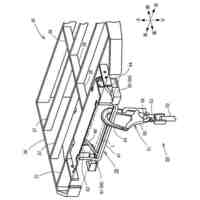
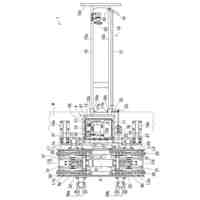
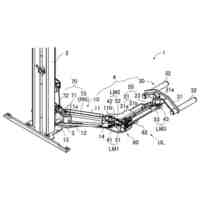
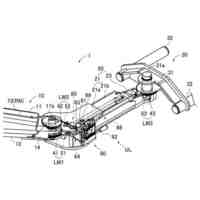
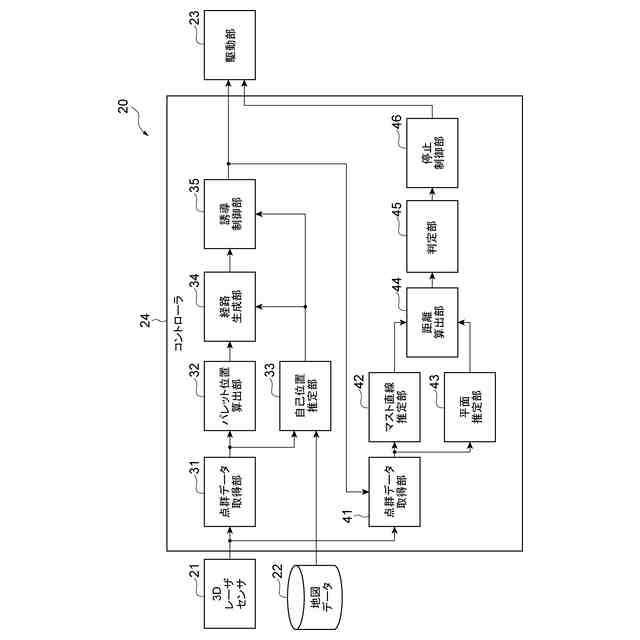
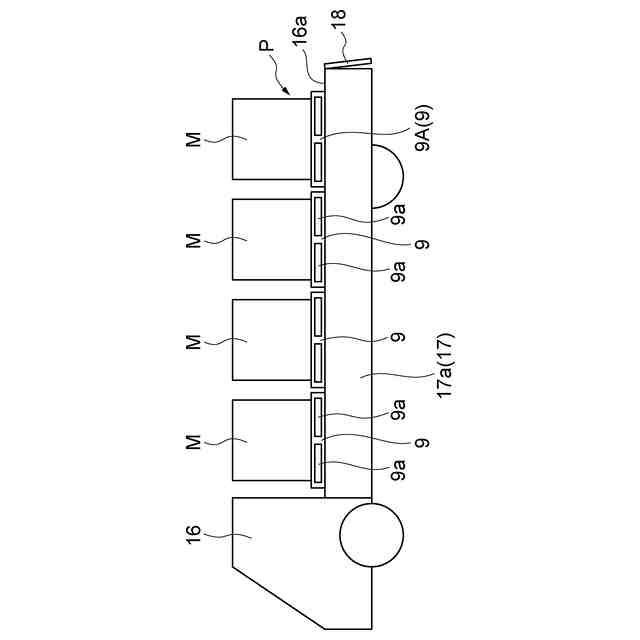
【解決手段】走行制御装置20は、トラック16の荷台16a及びフォークリフト1の左右のマスト7を含む範囲を検出する3Dレーザセンサ21と、3Dレーザセンサ21の点群データに基づいて、左右のマスト7を上下方向に延びる2本の直線として推定するマスト直線推定部42と、3Dレーザセンサ21の点群データに基づいて、側あおり17を平面として推定する平面推定部43と、2本の直線と平面とに基づいて、フォークリフト1の前面から側あおり17までの距離を算出する距離算出部44と、判定部45により距離が閾値以下であると判定されたときに、フォークリフト1の走行を停止させるようにフォークリフト1を制御する停止制御部46とを備える。
【選択図】図2
特許請求の範囲
【請求項1】
フォークリフトにより荷役対象物に対して荷役を行う際に、前記荷役対象物の荷役位置まで前記フォークリフトを走行させるように制御する走行制御装置であって、
前記荷役対象物及び前記フォークリフトの左右のマストを含む範囲を検出し、三次元の検出データを出力する検出部と、
前記検出部の検出データに基づいて、前記左右のマストを前記フォークリフトの上下方向に延びる2本の直線として推定するマスト直線推定部と、
前記検出部の検出データに基づいて、前記荷役対象物における前記フォークリフトと対向する対向部を平面として推定する平面推定部と、
前記マスト直線推定部により推定された前記2本の直線と前記平面推定部により推定された前記平面とに基づいて、前記フォークリフトの前面から前記対向部までの距離を算出する距離算出部と、
前記距離算出部により算出された前記フォークリフトの前面から前記対向部までの距離が予め決められた閾値以下であるかどうかを判定する判定部と、
前記判定部により前記フォークリフトの前面から前記対向部までの距離が前記閾値以下であると判定されたときに、前記フォークリフトの走行を停止させるように前記フォークリフトを制御する停止制御部とを備える走行制御装置。
続きを表示(約 530 文字)
【請求項2】
前記検出部は、前記検出データとして点群データを出力し、
前記マスト直線推定部は、前記点群データに基づいて、前記左右のマストに相当する2つの直線方程式を推定し、
前記平面推定部は、前記点群データに基づいて、前記対向部に相当する平面方程式を推定し、
前記距離算出部は、前記2つの直線方程式と前記平面方程式とに基づいて、前記フォークリフトの前面から前記対向部までの距離を算出する請求項1記載の走行制御装置。
【請求項3】
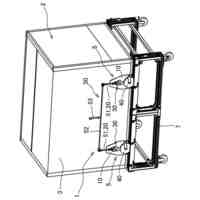
前記荷役対象物は、トラックの荷台であり、
前記対向部は、前記トラックに搭載されたあおりである請求項1記載の走行制御装置。
【請求項4】
前記距離算出部は、前記フォークリフトの前面から前記対向部における前記フォークリフトに最も近い部分までの距離を算出する請求項1記載の走行制御装置。
【請求項5】
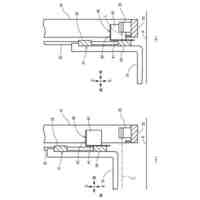
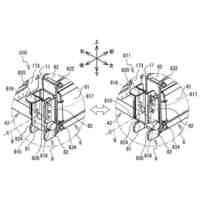
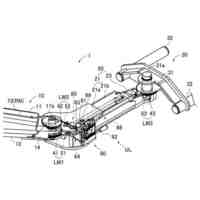
前記マストは、アウターマストと、前記アウターマストの車幅方向内側に配置され、前記アウターマストに対して昇降可能なインナーマストとを有し、
前記検出部は、左右の前記インナーマストを繋ぐ接続部材の前面に装着されている請求項1記載の走行制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、走行制御装置に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
従来の走行制御装置としては、例えば特許文献1に記載されている技術が知られている。特許文献1に記載の走行制御装置は、フォーク型無人搬送車のリアバンパーに設けられたバンパースイッチによって物及び人等が衝突したことが検出されると、フォーク型無人搬送車を停止させるようにブレーキを制御する。
【先行技術文献】
【特許文献】
【0003】
特開2015-170284号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記従来技術においては、以下の問題点が存在する。即ち、例えばフォーク型無人搬送車である自動運転フォークリフトによりトラックの荷台に対して荷役を行う際に、フォークリフトのバンパーがトラックに干渉(衝突)することがある。フォークリフトのバンパーがトラックに干渉すると、バンパーの摩耗等につながる。
【0005】
本発明の目的は、フォークリフトにより荷役対象物に対して荷役を行う際に、フォークリフトと荷役対象物との干渉を抑制することができる走行制御装置を提供することである。
【課題を解決するための手段】
【0006】
(1)本発明の一態様は、フォークリフトにより荷役対象物に対して荷役を行う際に、荷役対象物の荷役位置までフォークリフトを走行させるように制御する走行制御装置であって、荷役対象物及びフォークリフトの左右のマストを含む範囲を検出し、三次元の検出データを出力する検出部と、検出部の検出データに基づいて、左右のマストをフォークリフトの上下方向に延びる2本の直線として推定するマスト直線推定部と、検出部の検出データに基づいて、荷役対象物におけるフォークリフトと対向する対向部を平面として推定する平面推定部と、マスト直線推定部により推定された2本の直線と平面推定部により推定された平面とに基づいて、フォークリフトの前面から対向部までの距離を算出する距離算出部と、距離算出部により算出されたフォークリフトの前面から対向部までの距離が予め決められた閾値以下であるかどうかを判定する判定部と、判定部によりフォークリフトの前面から対向部までの距離が閾値以下であると判定されたときに、フォークリフトの走行を停止させるようにフォークリフトを制御する停止制御部とを備える。
【0007】
このような走行制御装置においては、検出部によって荷役対象物及びフォークリフトの左右のマストを含む範囲が検出され、三次元の検出データが出力される。そして、検出部の検出データに基づいて、左右のマストがフォークリフトの上下方向に延びる2本の直線として推定されると共に、荷役対象物におけるフォークリフトと対向する対向部が平面として推定される。そして、2本の直線と平面とに基づいて、フォークリフトの前面から対向部までの距離が算出される。そして、フォークリフトの前面から対向部までの距離が閾値以下であると判定されたときに、フォークリフトの走行を停止させるようにフォークリフトが制御される。ここで、荷役対象物におけるフォークリフトと対向する対向部を平面として推定することにより、対向部が安定して検知される。このため、フォークリフトの前面から対向部までの距離の算出精度が向上する。また、フォークリフトの前面から対向部までの距離が閾値以下になると、フォークリフトの走行が停止する。これにより、フォークリフトにより荷役対象物に対して荷役を行う際に、フォークリフトと荷役対象物との干渉が抑制される。
【0008】
(2)上記の(1)において、検出部は、検出データとして点群データを出力し、マスト直線推定部は、点群データに基づいて、左右のマストに相当する2つの直線方程式を推定し、平面推定部は、点群データに基づいて、対向部に相当する平面方程式を推定し、距離算出部は、2つの直線方程式と平面方程式とに基づいて、フォークリフトの前面から対向部までの距離を算出してもよい。このような構成では、RANSAC等といったロバスト推定のアルゴリズムを用いることにより、左右のマストに相当する2つの直線方程式と対向部に相当する平面方程式とを容易に推定することができる。また、検出部の点群データのバラツキによる算出距離のバラツキを抑えることができる。
【0009】
(3)上記の(1)または(2)において、荷役対象物は、トラックの荷台であり、対向部は、トラックに搭載されたあおりであってもよい。このような構成では、トラックの荷台に対して荷役を行う際に、トラックのあおりが安定して検知される。従って、フォークリフトとトラックのあおりとの干渉が抑制される。
【0010】
(4)上記の(1)~(3)の何れかにおいて、距離算出部は、フォークリフトの前面から対向部におけるフォークリフトに最も近い部分までの距離を算出してもよい。このような構成では、フォークリフトの前面から対向部におけるフォークリフトに最も近い部分までの距離が閾値以下になると、フォークリフトの走行が停止する。従って、フォークリフトと荷役対象物との干渉が更に抑制される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
懸吊装置
5か月前
ユニパルス株式会社
吊具
7か月前
個人
海上コンテナ昇降装置
2か月前
ユニパルス株式会社
荷役装置
1か月前
ユニパルス株式会社
吊具装置
2か月前
株式会社豊田自動織機
産業車両
3か月前
株式会社豊田自動織機
荷役車両
10か月前
株式会社豊田自動織機
荷役車両
27日前
株式会社豊田自動織機
荷役車両
1か月前
株式会社豊田自動織機
荷役車両
10か月前
株式会社豊田自動織機
荷役車両
6か月前
株式会社豊田自動織機
荷役車両
11か月前
株式会社日本キャリア工業
昇降機
6か月前
株式会社北川鉄工所
吊荷制御方法
11か月前
ユニパルス株式会社
荷役助力装置
9か月前
個人
建築部材の吊り上げ装置
4か月前
株式会社大林組
養生方法
4か月前
フジテック株式会社
エレベータ
1か月前
株式会社豊田自動織機
フォークリフト
7か月前
大同特殊鋼株式会社
治具
10か月前
株式会社ニシキ
可変型吊り天秤
9か月前
フジテック株式会社
エレベータ
12か月前
白山工業株式会社
腕重量補償機構
4か月前
有限会社サエキ
玉掛用器具
2か月前
株式会社タダノ
高所作業車
4か月前
ブラザー工業株式会社
架台
8か月前
ウエダ産業株式会社
鋼板保持装置
6か月前
ブラザー工業株式会社
架台
8か月前
小野谷機工株式会社
ジャッキ装置
7か月前
株式会社キトー
吊具
5か月前
ダイハツ工業株式会社
荷箱移動装置
8か月前
株式会社スギヤス
車両整備用リフト
2か月前
株式会社キトー
巻上機
7か月前
株式会社スギヤス
車両整備用リフト
2か月前
株式会社スギヤス
車両整備用リフト
2か月前
株式会社慧泉
搬送装置
7か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ