TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025019489
公報種別
公開特許公報(A)
公開日
2025-02-07
出願番号
2023123124
出願日
2023-07-28
発明の名称
衝突回避装置、衝突回避方法、およびプログラム
出願人
三菱重工業株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
G08G
1/16 20060101AFI20250131BHJP(信号)
要約
【課題】複数の通行ビークルが存在するときでも衝突を回避することができる衝突回避装置を提供する。
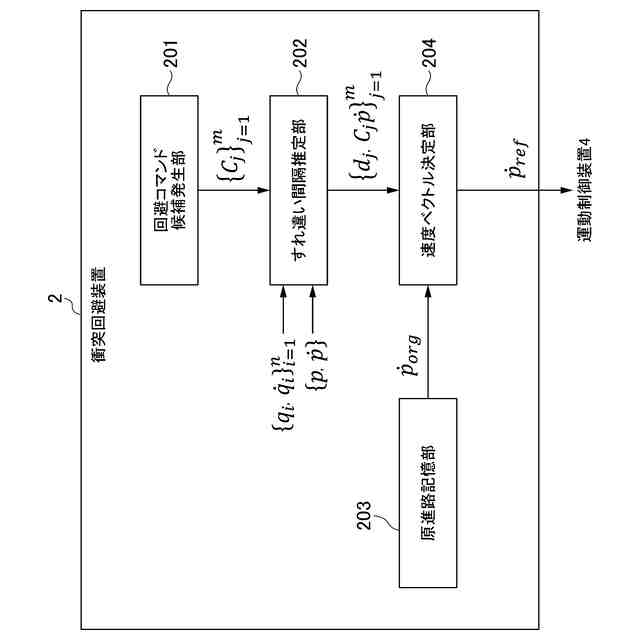
【解決手段】衝突回避装置は、通行ビークルのうち自ビークルとの相対距離が時間的に減少する通行ビークルを回避対象とし、前記自ビークルと前記回避対象との相対速度ベクトルおよび相対位置ベクトルに基づいて、前記自ビークルと前記回避対象とのすれ違い間隔を推定するすれ違い間隔推定部と、前記すれ違い間隔に基づいて、前記自ビークルに衝突回避行動を行わせる速度ベクトル決定する速度ベクトル決定部と、を備える。
【選択図】図2
特許請求の範囲
【請求項1】
自ビークルが他の通行ビークルと衝突することを回避する衝突回避装置であって、
前記通行ビークルのうち前記自ビークルとの相対距離が時間的に減少する通行ビークルを回避対象とし、前記自ビークルと前記回避対象との相対速度ベクトルおよび相対位置ベクトルに基づいて、前記自ビークルと前記回避対象とのすれ違い間隔を推定するすれ違い間隔推定部と、
前記すれ違い間隔に基づいて、前記自ビークルに衝突回避行動を行わせる速度ベクトル決定する速度ベクトル決定部と、
を備える衝突回避装置。
続きを表示(約 2,100 文字)
【請求項2】
前記すれ違い間隔推定部は、外積の演算子を×、内積の演算子を〇、ノルムの演算子を| |としたとき、((相対速度ベクトル×(相対速度ベクトル×相対位置ベクトル))〇相対位置ベクトル)÷|相対速度ベクトル×(相対速度ベクトル×相対位置ベクトル)|で表される外積演算および内積演算により回避対象とのすれ違い間隔を推定し、相対位置ベクトルと相対速度ベクトルの内積の符号が負となる前記通行ビークルを回避対象とする、
請求項1に記載の衝突回避装置。
【請求項3】
衝突回避を開始する以前の前記自ビークルの原速度ベクトルを記憶する原進路記憶部と、
前記自ビークルに対する速度ベクトルの複数の指令値候補を要素とする回避コマンド候補群を発生させる回避コマンド候補発生部と、
をさらに備え、
前記すれ違い間隔推定部は、現時点における前記自ビークルの位置ベクトルおよび速度ベクトルと、現時点における前記回避対象との相対位置ベクトル群と、前記回避コマンド候補群に依存して決まる前記回避対象との相対速度ベクトル群とに基づいて、前記要素ごとの前記自ビークルと前記回避対象とのすれ違い間隔群を推定し、
前記速度ベクトル決定部は、前記すれ違い間隔群に基づいて、すれ違い間隔を規定間隔より大きくし、かつ、前記原速度ベクトルと速度ベクトルの指令値候補との誤差のノルムが最も小さくなる要素を前記自ビークルの最良回避コマンドとして決定し、決定した前記最良回避コマンドに基づいて前記速度ベクトルを決定する、
請求項1に記載の衝突回避装置。
【請求項4】
前記回避コマンド候補発生部は、前記自ビークルの予め規定した第1の操縦方向への回避コマンドのみを含む第1の回避コマンド候補群を発生させる第1回避コマンド候補発生部と、前記第1の操縦方向とは異なる第2の操縦方向への回避コマンドを含む第2の回避コマンド候補群を発生させる第2回避コマンド候補発生部とを有し、
前記すれ違い間隔推定部は、前記第1の回避コマンド候補群に基づいて前記回避対象との第1のすれ違い間隔群を推定する第1すれ違い間隔推定部と、前記第2の回避コマンド候補群に基づいて前記回避対象との第2のすれ違い間隔群を推定する第2すれ違い間隔推定部とを有し、
前記速度ベクトル決定部は、前記自ビークルの緊急回避が必要ではない場合に、前記第1のすれ違い間隔群に基づいて第1の最良回避コマンドを決定し、決定した前記第1の最良回避コマンドに基づいて第1の速度ベクトルを決定する第1速度ベクトル決定部と、前記自ビークルの緊急回避が必要である場合に、前記第2のすれ違い間隔群に基づいて第2の最良回避コマンドを決定し、決定した前記第2の最良回避コマンドに基づいて第2の速度ベクトルを決定する第2速度ベクトル決定部とを有し、
前記衝突回避装置は、前記緊急回避が必要である場合に、前記第2の速度ベクトルを前記自ビークルに対する指令値として優先する切替部をさらに備える、
請求項3に記載の衝突回避装置。
【請求項5】
前記通行ビークルそれぞれについて、前記自ビークルに対し進路の優先権を有しているかを判定する優先権判定部をさらに備え、
前記すれ違い間隔推定部は、前記優先権を有していると判定された通行ビークルを前記回避対象として、前記すれ違い間隔を推定する、
請求項1から4のいずれか一項に記載の衝突回避装置。
【請求項6】
前記規定間隔は、前記自ビークルの速度ベクトルおよび前記通行ビークルの速度ベクトルがなす角度、または前記自ビークルおよび前記通行ビークルの相対速度に応じて変化する、
請求項3に記載の衝突回避装置。
【請求項7】
自ビークルが他の通行ビークルと衝突することを回避する衝突回避方法であって、
前記通行ビークルのうち前記自ビークルとの相対距離が時間的に減少する通行ビークルを回避対象とし、前記自ビークルと前記回避対象との相対速度ベクトルおよび相対位置ベクトルに基づいて、前記自ビークルと前記回避対象とのすれ違い間隔を推定するステップと、
前記すれ違い間隔に基づいて、前記自ビークルに衝突回避行動を行わせる速度ベクトル決定するステップと、
を有する衝突回避方法。
【請求項8】
自ビークルが他の通行ビークルと衝突することを回避する衝突回避装置に、
前記通行ビークルのうち前記自ビークルとの相対距離が時間的に減少する通行ビークルを回避対象とし、前記自ビークルと前記回避対象との相対速度ベクトルおよび相対位置ベクトルに基づいて、前記自ビークルと前記回避対象とのすれ違い間隔を推定するステップと、
前記すれ違い間隔に基づいて、前記自ビークルに衝突回避行動を行わせる速度ベクトル決定するステップと、
を実行させるプログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、衝突回避装置、衝突回避方法、およびプログラムに関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
多数の無人航空機(無人空中ビークル)を同時に航行させるには、衝突回避の技術が重要である。衝突回避の一般的な技術として、例えば、無人空中ビークル同士の離隔(Separation)を人が地上から遠隔で常時監視し、ある複数の無人空中ビークル同士の離隔が異常に小さくなった場合に、人が地上から複数の無人空中ビークルの少なくとも一つまたは複数に進路や速度の変更を命令して、衝突を回避する手法がある。しかし、地上と無人空中ビークルの無線通信が故障すると、人が地上から命令する方式は機能しない。
【0003】
衝突回避の一般的な技術の別の例は、操縦士を有する航空機(有人空中ビークル)の空中衝突防止装置(Traffic alert and Collision Avoidance System;TCAS)である。TCASは、地上の航空管制システムには依存せずに航空機の周囲を監視し、空中衝突の可能性がある他の航空機が存在する場合に、衝突警報や回避のための指示を操縦士に音声で知らせる。しかし、操縦士がいない無人空中ビークルにはTCASは有効ではない。
【0004】
したがって、無人ビークルを含むビークルの衝突を自動回避する技術が求められる。例えば、特許文献1には、空中ビークルが他の空中ビークルとの衝突(管制間隔の喪失)回避するための回避軌道を線分と弧によって表す技術が記載されている。線分と弧の決定に必要なパラメータ(例えば、弧で表される旋回の持続時間または角度値)は、ニュートンラフソン法のような反復演算で決定しなければならない。すなわち、回避軌道を簡単な一方向関数(one-way function)で決めることができない。したがって、演算負荷が高い。さらに、回避軌道を求める方式では、回避の途中に新たな回避対象が出現したときなど、回避軌道を表す線分と弧の数が増えるので、さらに演算が膨大となる。
【0005】
また、特許文献2には、回避軌道を線分や弧で定めるのではなく、自ビークル(航空機)に対し{機首方位,上昇率,下降率,速さ}などを変更する回避コマンドを用いることが記載されている。回避コマンドは一方向関数(one-way function)で決めることができるので、特許文献1と比較して演算負荷を軽減することができる。
【先行技術文献】
【特許文献】
【0006】
特許第5933244号公報
特許第6272637号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、特許文献2に例示される従来技術では、通行するビークルが複数あるときに衝突回避が困難となる可能性がある。
【0008】
具体例を説明する。特許文献2では、自ビークルである第1航空機と、他のビークルである第2航空機とがある空域内を飛行するとき、第1航空機と第2航空機との間隔を管理するため、第1航空機と第2航空機との両方が同時にいてはならない領域を仮想の境界線(間隔境界)で画定する。また、第1航空機の衝突防止モジュールは、第1航空機と第2航空機の最接近点を予測し、最接近点における第1航空機と第2航空機とのレンジが間隔境界を侵害する場合に、回避コマンドを発信して第1航空機の飛行経路を変更する。なお、衝突防止システムは、必要レベルの間隔m
required
、安全レベルの間隔m
safe
、または規定レベルの間隔m
imposed
を示す間隔境界を確定してもよいし、三次元の間隔境界層(separation perimeter layers)を画定してもよい。
【0009】
衝突防止システムは、間隔境界のひとつひとつについて衝突防止コマンドコンポーネントC-を決定する。自航空機以外に通行する航空機が複数ある場合、衝突防止システムは自航空機以外のひとつひとつに対する回避コマンドを決定する。したがって、間隔境界の数がp、通行する航空機の数がnの場合、衝突防止コマンドコンポーネントはn個×p個になる。簡単のために、間隔境界の数を1にして説明する。この場合、衝突防止コマンドコンポーネントは{C-
1,1
,C-
1,2
,…,C-
1,n
}であり、衝突防止コマンドコンポーネントはn個である。回避コマンドが通行する航空機の数nあっても、自航空機の{機首方位,上昇率,下降率,速さ}はそれぞれ一つしかないから、複数の衝突防止コマンドコンポーネントに従って操縦することはできない。複数の回避コマンドから自航空機の{機首方位,上昇率,下降率,速さ}を一つ決めなければならない。特許文献2では、衝突防止システムは、ゲインK
p,n
を用いて、衝突防止コマンドコンポーネントを加重和して回避コマンドF-
control
を一つ決定している。間隔境界の数pが1のときには、式(1)により回避コマンドF-
control
決定する。
【0010】
TIFF
2025019489000002.tif
20
170
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
自動運転車
1か月前
ニッタン株式会社
煙感知器
2か月前
個人
迷子支援システム
26日前
株式会社ニカデン
検出装置
12日前
株式会社サンライン
発炎筒携行容器
1か月前
能美防災株式会社
表示灯カバー
2か月前
ニッタン株式会社
発信機
26日前
株式会社あおい興産
避難誘導灯
20日前
株式会社国際電気
防災システム
7日前
アズビル株式会社
測定システム
3か月前
ニッタン株式会社
発信機
26日前
日本信号株式会社
情報提供システム
3か月前
能美防災株式会社
非常放送システム
2か月前
京セラ株式会社
案内システム及び案内方法
2か月前
日本無線株式会社
人物探索システム
2か月前
個人
安全に飛び乗りが可能な低速自動運転車
2か月前
京セラ株式会社
制御装置
26日前
株式会社F2Fグループ
疲労度判定方法
2か月前
トヨタ自動車株式会社
運転支援システム
2か月前
シャープ株式会社
表示装置
1か月前
トヨタ自動車株式会社
照度推定装置
3か月前
トヨタ自動車株式会社
運転支援装置
2か月前
株式会社豊田自動織機
運行表示装置
13日前
京セラ株式会社
表示システム
2か月前
戸田建設株式会社
検知システム
1か月前
日本信号株式会社
信号システム及び信号灯器
19日前
トヨタ自動車株式会社
渋滞検知システム
2か月前
能美防災株式会社
防災設備
3か月前
株式会社JR西日本テクシア
接触防止システム
19日前
トヨタ自動車株式会社
情報提供システム
1か月前
株式会社創発システム研究所
交通検知システム
2か月前
トヨタ自動車株式会社
ドライブレコーダ
2か月前
株式会社JVCケンウッド
報知装置及び報知方法
26日前
株式会社京三製作所
交通信号制御システム
12日前
株式会社市川工務店
車両用ゲート開閉装置
2か月前
株式会社ケア・テック
警報システム
2か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ