TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025019009
公報種別
公開特許公報(A)
公開日
2025-02-06
出願番号
2024118629
出願日
2024-07-24
発明の名称
車両追跡方法、車両追跡システム、およびプログラム
出願人
日本電気株式会社
代理人
個人
,
個人
主分類
G08G
1/01 20060101AFI20250130BHJP(信号)
要約
【課題】車両追跡方法、車両追跡システム、およびプログラムを提供する。
【解決手段】
車両追跡方法は、分散型光ファイバセンシング(DFOS)データを受信することと、DFOSデータ内のヒットポイントであって、それぞれが検出時間における対応する車両の位置に対応するヒットポイントを識別することと、識別されたヒットポイントをクラスタリングして、1つ以上のクラスタを規定することと、1つ以上のクラスタのそれぞれにおけるヒットポイントの数量と検出時間の数量とに基づき、1つ以上のクラスタのそれぞれを第1の分類又は第2の分類に分類することと、第1の分類を有する前記第1のクラスタの前記ヒットポイントに基づき、1つ以上のクラスタの第1のクラスタのヒットポイントに対応する第1の車両の車両パラメータを推定すること、を含む。
【選択図】図2
特許請求の範囲
【請求項1】
分散型光ファイバセンシング(DFOS)データを受信することと、
前記DFOSデータ内のヒットポイントであって、それぞれが検出時間における対応する車両の位置に対応するヒットポイントを識別することと、
前記識別されたヒットポイントをクラスタリングして、1つ以上のクラスタを規定することと、
前記1つ以上のクラスタのそれぞれにおける前記ヒットポイントの数量と前記検出時間の数量とに基づき、前記1つ以上のクラスタのそれぞれを第1の分類又は第2の分類に分類することと、
前記第1の分類を有する前記第1のクラスタの前記ヒットポイントに基づき、前記1つ以上のクラスタの第1のクラスタの前記ヒットポイントに対応する第1の車両の車両パラメータを推定すること、
を含む車両追跡方法。
続きを表示(約 1,600 文字)
【請求項2】
前記第2の分類を有する前記1つ以上のクラスタのそれぞれの最も早く検出されたヒットポイントを除去することと、
前記第1の分類を有する前記1つ以上のクラスタのクラスタのみが残るまで、前記クラスタリングすること、前記分類すること、及び前記除去することを反復的に繰り返すことと、
をさらに含む、請求項1に記載の車両追跡方法。
【請求項3】
前記最も早く検出されたヒットポイントを除去することに応じて、前記検出時間の数量を1だけ減らすことをさらに含む、請求項2に記載の車両追跡方法。
【請求項4】
前記車両パラメータを推定することは、速度、加速度、又は車線変更のうちの少なくとも1つを推定することを含む、請求項1に記載の車両追跡方法。
【請求項5】
前記分類することは、
前記検出時間の数量に基づいて閾値を決定することと、
前記1つ以上のヒットポイントのそれぞれに関して前記1つ以上のクラスタの対応するクラスタにおける前記ヒットポイントの数量を比較することと、
前記対応するクラスタにおける前記ヒットポイントの数量が前記閾値以上であるとの決定に応じて前記対応するクラスタを前記第1の分類として分類することと、
前記対応するクラスタにおける前記ヒットポイントの数量が前記閾値未満であるとの決定に応じて前記対応するクラスタを前記第2の分類として分類することと、
を含む、請求項1に記載の車両追跡方法。
【請求項6】
前記閾値を決定することは、前記検出時間の数量に選択されたパーセンテージを乗算することを含む、請求項5に記載の車両追跡方法。
【請求項7】
前記車両パラメータは、速度、加速度、又は車線変更を含む、請求項1に記載の車両追跡方法。
【請求項8】
前記推定された車両パラメータを外部デバイスに送信することをさらに含む、請求項1に記載の車両追跡方法。
【請求項9】
指示を記憶するように構成されるコンピュータ可読媒体と、
前記コンピュータ可読媒体に接続されるプロセッサと、
を備え、前記プロセッサは、
分散型光ファイバセンシング(DFOS)データを受信することと、
前記DFOSデータ内のヒットポイントであって、それぞれが検出時間における対応する車両の位置に対応するヒットポイントを識別し、
前記識別されたヒットポイントをクラスタリングして、1つ以上のクラスタを規定し、
前記1つ以上のクラスタのそれぞれにおける前記ヒットポイントの数量と前記検出時間の数量とに基づき、前記1つ以上のクラスタのそれぞれを第1の分類又は第2の分類に分類し、
前記第1の分類を有する前記第1のクラスタの前記ヒットポイントに基づき、前記1つ以上のクラスタの第1のクラスタの前記ヒットポイントに対応する第1の車両の車両パラメータを推定する
ための前記指示を実行するように構成される、車両追跡システム。
【請求項10】
分散型光ファイバセンシング(DFOS)データを受信することと、
前記DFOSデータ内のヒットポイントであって、それぞれが検出時間における対応する車両の位置に対応するヒットポイントを識別することと、
前記識別されたヒットポイントをクラスタリングして、1つ以上のクラスタを規定することと、
前記1つ以上のクラスタのそれぞれにおける前記ヒットポイントの数量と前記検出時間の数量とに基づき、前記1つ以上のクラスタのそれぞれを第1の分類又は第2の分類に分類することと、
前記第1の分類を有する前記第1のクラスタの前記ヒットポイントに基づき、前記1つ以上のクラスタの第1のクラスタの前記ヒットポイントに対応する第1の車両の車両パラメータを推定すること、
をコンピュータに実行させるためのプログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、分散型光ファイバセンシング(DFOS)システム及びその使用方法に関する。
続きを表示(約 3,000 文字)
【背景技術】
【0002】
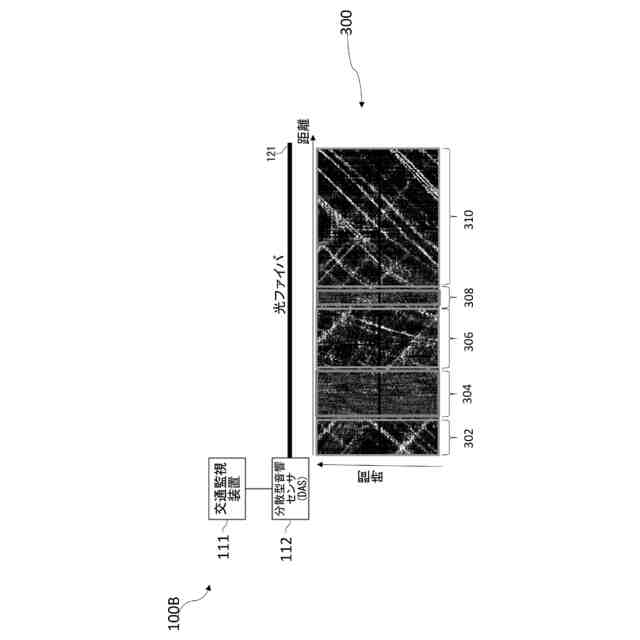
光ファイバは、多数の車道に沿って存在する。これらの光ファイバに取り付けられた分散型音響センサ(DAS)は、光ファイバが位置される振動を検出することができる。ある場合には、これらの振動は通過車両の結果である。DASは、車両の数、車両の車線位置、及び車両速度に関するデータを収集することができる。
【0003】
DASは、トラフィックパラメータを決定するために、時間及び距離に基づいてウォーターフォールデータを生成する。DASが個々の車両を検出する能力は、DASによって検出された信号のノイズ量に関連する。
【発明の概要】
【発明が解決しようとする課題】
【0004】
車両パラメータの正確な決定を改善することが望まれている。
【課題を解決するための手段】
【0005】
本開示の第1の実施態様に係る車両追跡方法は、分散型光ファイバセンシング(DFOS)データを受信することと、前記DFOSデータ内のヒットポイントであって、それぞれが検出時間における対応する車両の位置に対応するヒットポイントを識別することと、前記識別されたヒットポイントをクラスタリングして、1つ以上のクラスタを規定することと、前記1つ以上のクラスタのそれぞれにおける前記ヒットポイントの数量と前記検出時間の数量とに基づき、前記1つ以上のクラスタのそれぞれを第1の分類又は第2の分類に分類することと、前記第1の分類を有する前記第1のクラスタの前記ヒットポイントに基づき、前記1つ以上のクラスタの第1のクラスタの前記ヒットポイントに対応する第1の車両の車両パラメータを推定すること、を含む。
【0006】
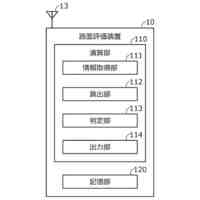
本開示の第2の実施態様に係る車両追跡システムは、指示を記憶するように構成されるコンピュータ可読媒体と、前記コンピュータ可読媒体に接続されるプロセッサと、を備え、前記プロセッサは、分散型光ファイバセンシング(DFOS)データを受信することと、前記DFOSデータ内のヒットポイントであって、それぞれが検出時間における対応する車両の位置に対応するヒットポイントを識別し、前記識別されたヒットポイントをクラスタリングして、1つ以上のクラスタを規定し、前記1つ以上のクラスタのそれぞれにおける前記ヒットポイントの数量と前記検出時間の数量とに基づき、前記1つ以上のクラスタのそれぞれを第1の分類又は第2の分類に分類し、前記第1の分類を有する前記第1のクラスタの前記ヒットポイントに基づき、前記1つ以上のクラスタの第1のクラスタの前記ヒットポイントに対応する第1の車両の車両パラメータを推定するための前記指示を実行するように構成される。
【0007】
本開示の第3の実施態様に係るプログラムは、分散型光ファイバセンシング(DFOS)データを受信することと、前記DFOSデータ内のヒットポイントであって、それぞれが検出時間における対応する車両の位置に対応するヒットポイントを識別することと、前記識別されたヒットポイントをクラスタリングして、1つ以上のクラスタを規定することと、前記1つ以上のクラスタのそれぞれにおける前記ヒットポイントの数量と前記検出時間の数量とに基づき、前記1つ以上のクラスタのそれぞれを第1の分類又は第2の分類に分類することと、前記第1の分類を有する前記第1のクラスタの前記ヒットポイントに基づき、前記1つ以上のクラスタの第1のクラスタの前記ヒットポイントに対応する第1の車両の車両パラメータを推定すること、をコンピュータに実行させる。
【図面の簡単な説明】
【0008】
本開示の態様は、以下の詳細な説明から、添付の図と共に読む際に最も良く理解される。業界の標準的な慣行にしたがって、様々な特徴が原寸に比例して描かれないことに留意されたい。実際に、議論を明確にするため、様々特徴の寸法が任意に増大又は減少される場合がある。
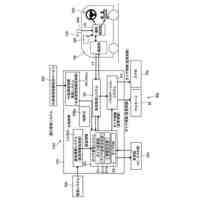
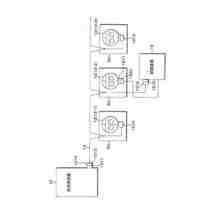
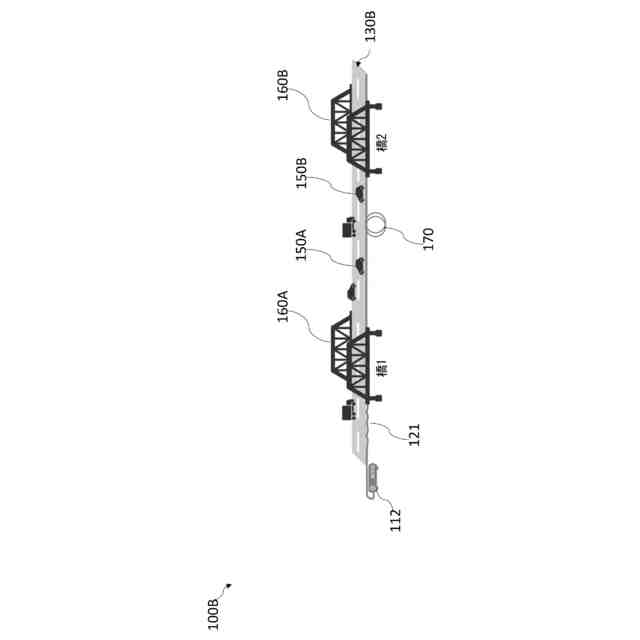
幾つかの実施形態に係る車道に沿った分散型音響センサ(DAS)システムの概略図である。
幾つかの実施形態に係る車道に沿った分散型音響センサ(DAS)システムの概略図である。
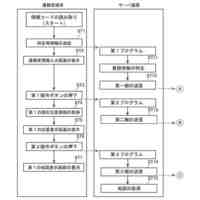
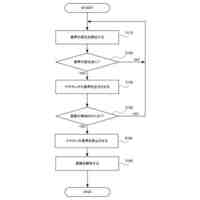
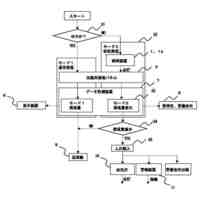
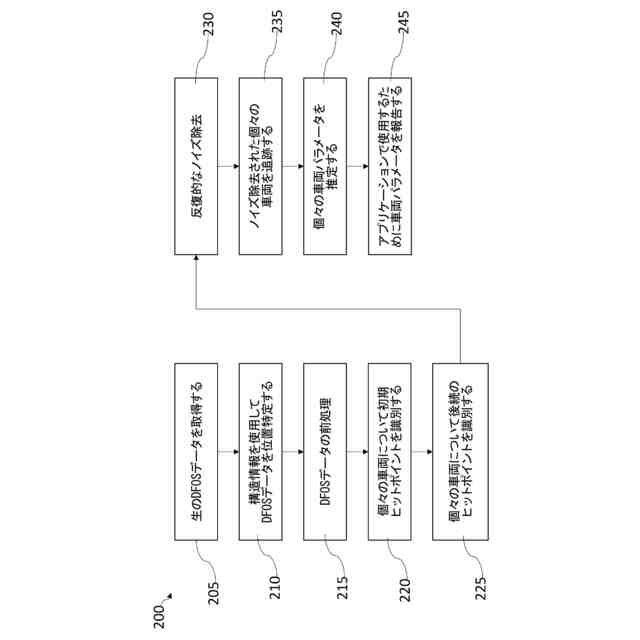
幾つかの実施形態に係る分散型光ファイバセンシング(DFOS)データからのデータを分析する方法のフローチャートである。
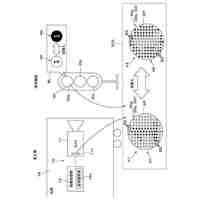
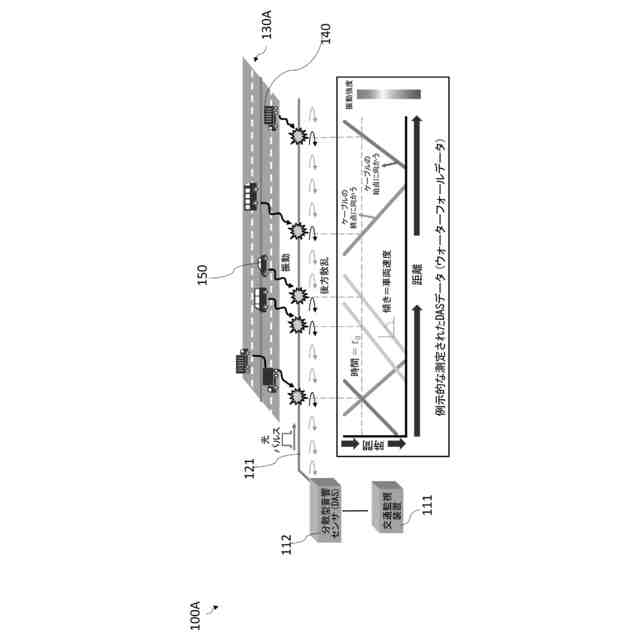
幾つかの実施形態に係るDASシステムによって収集されたウォーターフォールデータを伴うDASシステムの概略図である。
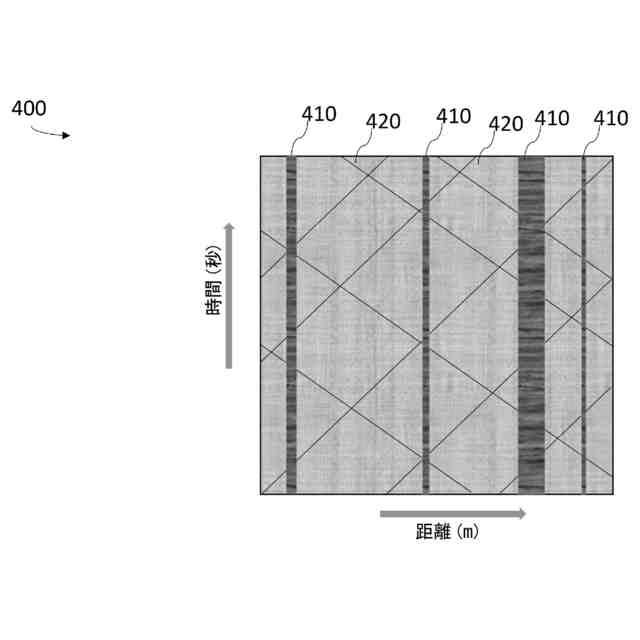
幾つかの実施形態に係るフィルタリングされたDFOSデータの図である。
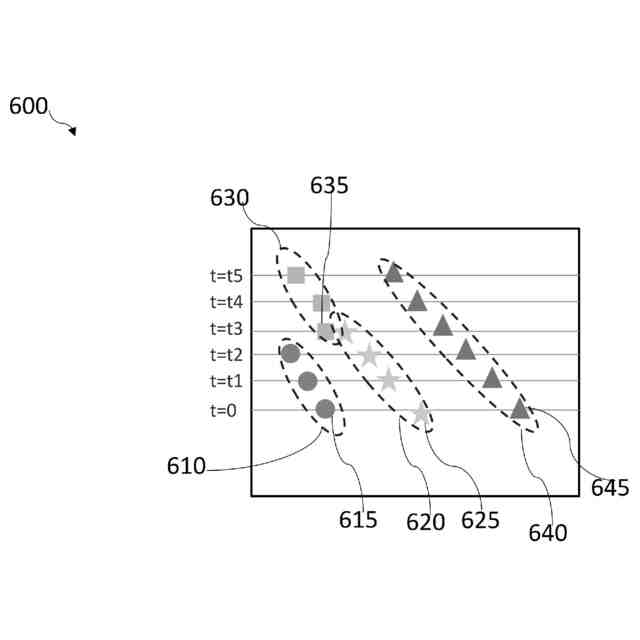
幾つかの実施形態に係るDFOSデータに基づく検出された車両位置のプロットの図である。
幾つかの実施形態に係るDFOSデータに基づく検出された車両位置のプロットの図である。
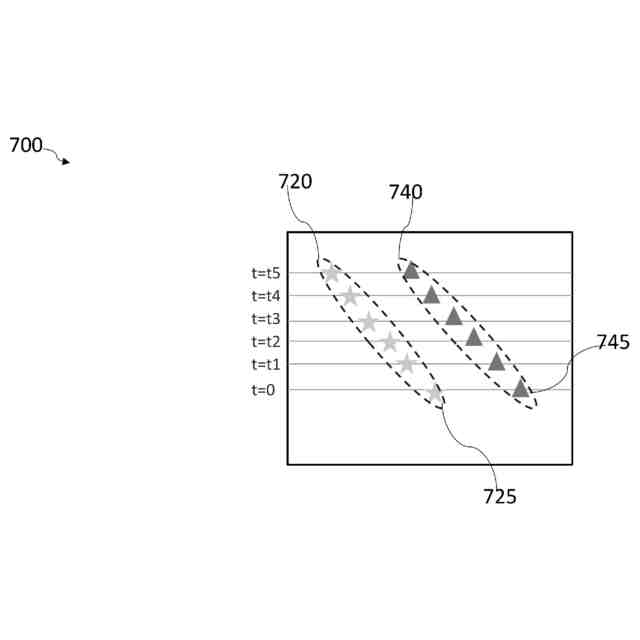
幾つかの実施形態に係るDFOSデータに基づくノイズ除去された車両位置のプロットの図である。
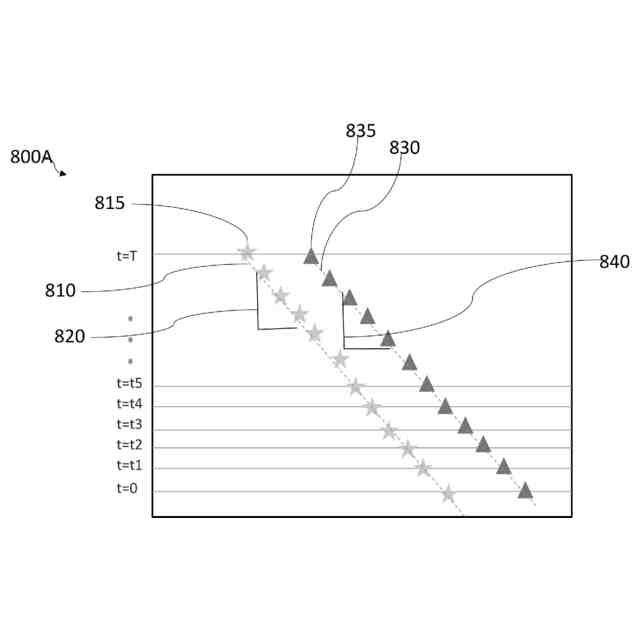
幾つかの実施形態に係る車両パラメータを決定するためのプロットの図である。
幾つかの実施形態に係る車両パラメータを決定するためのプロットの図である。
幾つかの実施形態に係る分散型光ファイバセンシング(DFOS)データからデータをノイズ除去する方法のフローチャートである。
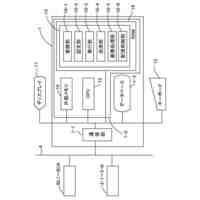
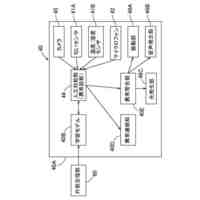
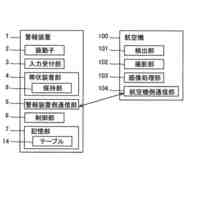
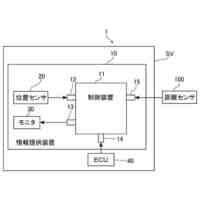
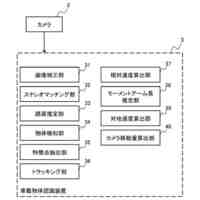
幾つかの実施形態に係るDFOSデータを分析するためのシステムのブロック図である。
【発明を実施するための形態】
【0009】
以下の開示は、与えられた主題の異なる特徴を実施するための多くの異なる実施形態又は例を提供する。本開示を簡略化するために、構成要素、値、工程、材料、配置などの特定の例が以下に記載される。勿論、これらは、単なる例にすぎず、限定しようとするものではない。他の構成要素、値、工程、材料、配置などが考えられる。例えば、以下の説明において第2の特徴の上方又は第2の特徴上に第1の特徴を形成することは、第1及び第2の特徴が直接に接触した状態で形成される実施形態を含んでもよいとともに、第1及び第2の特徴が直接に接触しないように更なる特徴が第1及び第2の特徴間に形成されてもよい実施形態を含んでもよい。更に、本開示は、様々な例において参照数字及び/又は文字を繰り返す場合がある。この繰り返しは、簡略及び明確のためのものであり、それ自体、論じられる様々な実施形態及び/又は形態の間の関係を定めるものではない。
【0010】
更に、「真下(beneath)」、「下方(below)」、「下側(lower)」、「上方(above)」、「上側(upper)」などの空間的に相対的な用語は、本明細書では、図に示すように、1つの要素又は特徴と別の要素又は特徴との関係を説明するための説明を容易にするために使用され得る。空間的に相対的な用語は、図に示す向きに加えて、使用中又は動作中のデバイスの異なる向きを包含することを意図している。装置は、他の方向に向けられてもよく(90度又は他の向きに回転されてもよく)、本明細書で使用される空間的に相対的な記述子は、それに応じて同様に解釈されてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
黄色点滅式信号機
13日前
個人
空飛ぶ自動車の空路
9日前
個人
迷子支援システム
1か月前
個人
万引き防止システム
1か月前
株式会社ニカデン
検出装置
1か月前
ABT合同会社
詐欺防止装置
1か月前
株式会社あおい興産
避難誘導灯
1か月前
株式会社国際電気
防災システム
1か月前
日本信号株式会社
運行管理システム
23日前
株式会社島津製作所
警報装置
2日前
京セラ株式会社
制御装置
1か月前
ホーチキ株式会社
防災システム
1か月前
株式会社SUBARU
危険報知システム
1か月前
合同会社ORIC-LAB
太陽光発電管理装置
4日前
本田技研工業株式会社
路面評価装置
3日前
本田技研工業株式会社
路面評価装置
3日前
株式会社豊田自動織機
運行表示装置
1か月前
日本信号株式会社
信号システム及び信号灯器
1か月前
株式会社小糸製作所
情報提供装置及び制御装置
1か月前
株式会社JR西日本テクシア
接触防止システム
1か月前
株式会社知財事業研究所
運行計画作成システム
3日前
トヨタ自動車株式会社
車両の情報処理装置
27日前
株式会社京三製作所
交通信号制御システム
1か月前
株式会社デンソー
障害物通知システム
1か月前
日本宅配システム株式會社
入館管理システム
9日前
トヨタ自動車株式会社
システム
9日前
本田技研工業株式会社
報知装置
1か月前
能美防災株式会社
中継器
1か月前
株式会社デンソー
運転状況管理システム
1か月前
本田技研工業株式会社
運転支援システム
3日前
トヨタ自動車株式会社
自動運転車両
2日前
日立Astemo株式会社
車載物体認識装置
9日前
能美防災株式会社
加煙試験器
3日前
ホーチキ株式会社
通報装置及び非常通報システム
3日前
ホーチキ株式会社
通報装置及び非常通報システム
3日前
三菱電機株式会社
車両システム
2日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ