TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025015908
公報種別
公開特許公報(A)
公開日
2025-01-31
出願番号
2023118796
出願日
2023-07-21
発明の名称
車両制御装置、および、車両制御方法
出願人
日立Astemo株式会社
代理人
ポレール弁理士法人
主分類
B62D
6/00 20060101AFI20250124BHJP(鉄道以外の路面車両)
要約
【課題】 カーブ走行中にカメラ画像に基づく車線認識を失陥しても、カーブ走行中の操縦安定性を確保する。
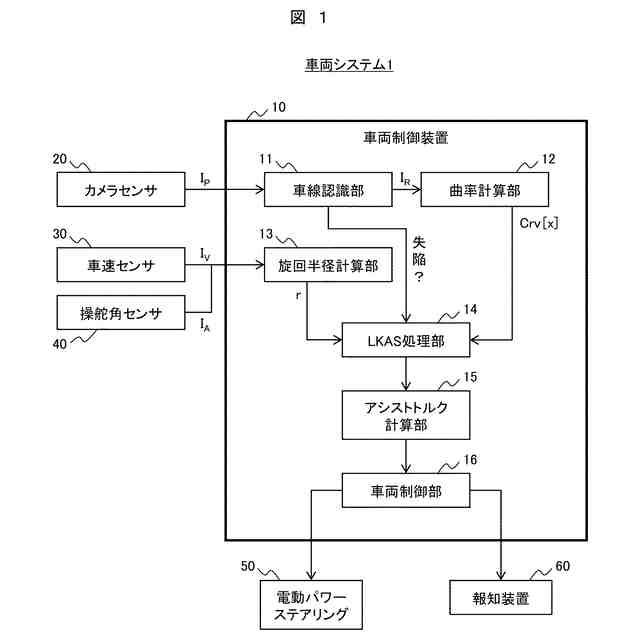
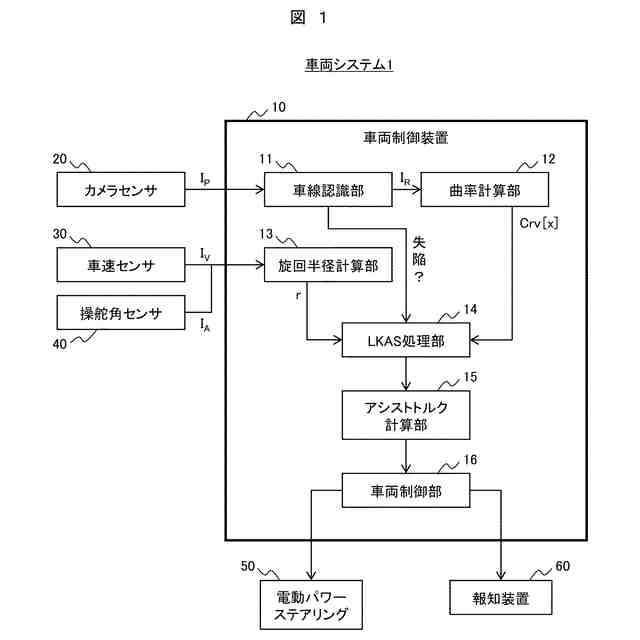
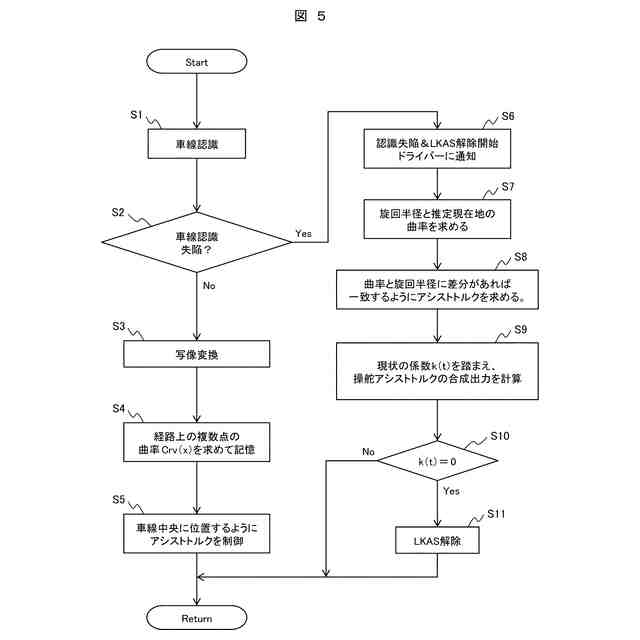
【解決手段】 画像から進行方向の車線情報を認識する車線認識部と、車線情報から走行経路の曲率情報を計算する曲率計算部と、車速と舵角から自車両の旋回半径を計算する旋回半径計算部と、車両位置と走行経路のズレを求め、車両位置が走行経路に近づく操舵角を計算するLKAS処理部と、計算した操舵角を維持する操舵アシストトルクを計算するアシストトルク計算部と、計算した操舵アシストトルクを発生させる指令を電動パワーステアリングに出力する車両制御部と、を備え、車線認識が失陥した場合、LKAS処理部は、車線認識の失陥前に記憶した曲率情報に基づく曲率に旋回半径が近づく操舵角を計算し、車両制御部は、車線認識の失陥から所定期間内に限り、LKAS処理部で計算した操舵角に基づく指令を電動パワーステアリングに出力する車両制御装置。
【選択図】 図1
特許請求の範囲
【請求項1】
車両走行中の車線維持を支援する車両制御装置であって、
車載カメラからの画像情報に基づいて進行方向の車線情報を認識する車線認識部と、
前記車線情報に基づいて走行経路の曲率情報を計算する曲率計算部と、
車速センサからの車速情報と操舵角センサからの舵角情報に基づいて自車両の旋回半径を計算する旋回半径計算部と、
車両位置と前記走行経路のズレを求め、車両位置が走行経路に近づく操舵角を計算するLKAS処理部と、
該LKAS処理部で計算した操舵角を維持する操舵アシストトルクを計算するアシストトルク計算部と、
該アシストトルク計算部で計算した操舵アシストトルクを発生させる指令を電動パワーステアリングに出力する車両制御部と、を備え、
前記車線認識部での車線認識が失陥した場合、
前記LKAS処理部は、車線認識の失陥前に記憶した曲率情報に基づく曲率に前記旋回半径が近づく操舵角を計算し、
前記車両制御部は、車線認識の失陥から所定期間内に限り、前記LKAS処理部で計算した操舵角に基づく指令を前記電動パワーステアリングに出力することを特徴とする車両制御装置。
続きを表示(約 980 文字)
【請求項2】
請求項1に記載の車両制御装置において、
前記車線認識部での車線認識が失陥した場合、
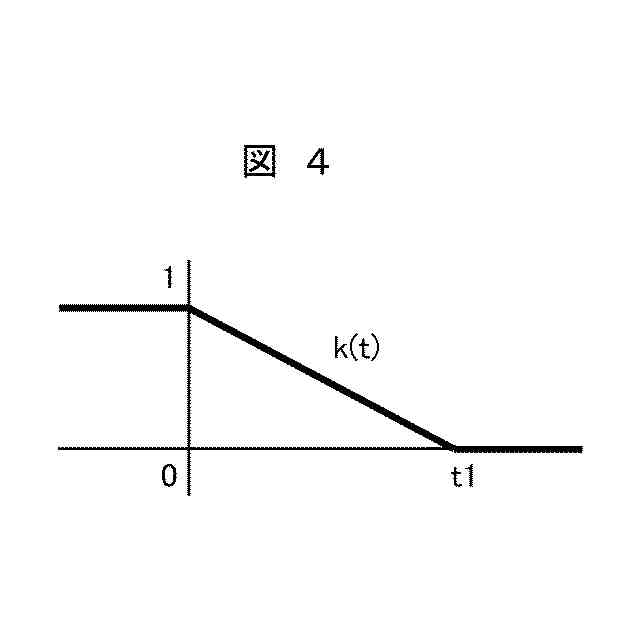
前記アシストトルク計算部は、前記LKAS処理部で計算した操舵角を維持する操舵アシストトルクに逓減する係数を乗算した操舵アシストトルクを計算し、前記車両制御部に出力することを特徴とする車両制御装置。
【請求項3】
請求項1に記載の車両制御装置において、
前記車線認識部での車線認識が失陥した場合、
前記車両制御部は、報知装置を介してLKAS処理の解除をドライバに報知することを特徴とする車両制御装置。
【請求項4】
請求項1から請求項3の何れか一項に記載の車両制御装置において、
前記車線認識部での車線認識が失陥した場合、
前記曲率計算部は、GNSSから取得した地図情報内の車線情報に基づいて走行経路の曲率情報を計算することを特徴とする車両制御装置。
【請求項5】
車両走行中の車線維持を支援する車両制御方法であって、
車載カメラからの画像情報に基づいて進行方向の車線情報を認識する車線認識ステップと、
前記車線情報に基づいて走行経路の曲率情報を計算する曲率計算ステップと、
車速センサからの車速情報と操舵角センサからの舵角情報に基づいて自車両の旋回半径を計算する旋回半径計算ステップと、
車両位置と前記走行経路のズレを求め、車両位置が走行経路に近づく操舵角を計算するLKAS処理ステップと、
該LKAS処理ステップで計算した操舵角を維持する操舵アシストトルクを計算するアシストトルク計算ステップと、
該アシストトルク計算ステップで計算した操舵アシストトルクを発生させる指令を電動パワーステアリングに出力する車両制御ステップと、を備え、
前記車線認識ステップでの車線認識が失陥した場合、
前記LKAS処理ステップでは、車線認識の失陥前に記憶した曲率情報に基づく曲率に前記旋回半径が近づく操舵角を計算し、
前記車両制御ステップでは、車線認識の失陥から所定期間内に限り、前記LKAS処理ステップで計算した操舵角に基づく指令を前記電動パワーステアリングに出力することを特徴とする車両制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両走行中の車線維持を支援する、車両制御装置、および、車両制御方法に関わる。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
車線維持支援システム(Lane Keep Assist System、以下「LKAS」と称する)は、車載カメラで撮像したカメラ画像をもとに、走行中の車線を認識して電動パワーステアリングに適切なアシストトルクを発生させることで、車両走行中の車線維持を支援する機能である。このLKASには、車線を逸脱しそうになった場合にのみアシストトルクを発生させる方式と、車線中央走行を維持するアシストトルクを常時発生させる方式がある。後者のLKASは、直線路走行だけでなくカーブ走行にも対応する必要がある。
【0003】
そのため、特許文献1では、例えば請求項1に「自車両の走行方向前方の走行車線のカーブ状況に応じてステアリングに保舵トルクを加えてカーブ旋回時におけるドライバの保舵力を軽減する保舵力補助装置であって、該走行車線の走行方向前方の曲率を算出する曲率算出手段と、該自車両の車速を検出する車速検出手段と、該曲率算出手段で算出された該曲率と該車速検出手段で検出された該車速とに基づいて制御トルクを算出する制御トルク算出手段と、該制御トルク算出手段で算出された該制御トルクが該車両のカーブの旋回を助ける方向に発生するように該操舵アクチュエータを制御する制御手段とをそなえたことを特徴とする、保舵力補助装置。」とあるように、前方カーブの曲率と車速に基づいて、曲率に対応した操舵角になるアシストトルクを発生させている。
【0004】
しかしながら、特許文献1では、カーブ走行中に、逆光、煙、濃霧、雪、雨などの影響によりカメラ画像から車線を認識できなくなる車線認識失陥が発生した場合、すなわち、前方カーブの曲率を認識できない場合のアシストトルク制御について述べていない。
【0005】
ここで、システム主体の車両制御が困難になった場合は、車両制御の主体をドライバに引き継ぐのが一般的である。この種の従来技術として、特許文献2が知られている。
【0006】
同文献では、段落0007に「ODD(註:運行設計領域)逸脱により自動車線変更機能停止予告と操作引継要求が運転者に通知された際に、通知に慌てた運転者の過剰な操舵操作によるオーバーライドや、過度のブレーキ操作/ アクセル操作によるオーバーライドにより車両の挙動が不安定になることも想定される。」とあり、要約書の解決手段欄に「・・・、システム運行設計領域逸脱時に、車速に応じて設定される操舵トルクまたは操舵角の上限値を、システム運行設計領域内にある正常時よりも低い値に変更する。」とある。
【0007】
このように、特許文献2では、操舵主体がシステムからドライバに移行した直後の、慌てたドライバによる過剰な操舵の影響を制限することで、操舵主体移行時の操縦安定性を確保しようとしている。
【先行技術文献】
【特許文献】
【0008】
特開平11-147473号公報
特開2022-171709号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
しかしながら、特許文献2でもLKASによる操舵制御中の車線認識失陥対策は十分に検討されているとは言えず、ドライバによる操舵を制限することで、却って車線逸脱し易くなる危険もある。
【0010】
そこで、本発明は、カーブ走行中にカメラ画像に基づく車線認識を失陥しても、カーブ走行中の操縦安定性を確保する、車両制御装置、および、車両制御方法を提供することを目的とする。
【課題を解決するための手段】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
重量物移動台車
10か月前
個人
折り畳み自転車
2か月前
個人
自転車用傘捕捉具
3か月前
個人
体重掛けリフト台車
3か月前
個人
自転車用荷台
7か月前
個人
自転車用荷物台
3か月前
個人
アタッチメント
3か月前
個人
キャンピングトライク
1か月前
井関農機株式会社
作業車両
8か月前
個人
クリアレインシェード
10か月前
個人
ステアリングの操向部材
6か月前
個人
スライドレインプルーフ
9か月前
株式会社クラベ
面状ユニット
9か月前
個人
ステアリングの操向部材
1か月前
株式会社ホシプラ
台車
10か月前
株式会社CPM
駐輪機
4か月前
三甲株式会社
台車
6か月前
三甲株式会社
台車
6か月前
株式会社三五
リアサブフレーム
2か月前
祖峰企画株式会社
平台車
7か月前
帝人株式会社
車両構造体
9か月前
豊田合成株式会社
ハンドル
10か月前
豊田合成株式会社
操舵装置
4か月前
ヤマハ発動機株式会社
車両
4か月前
個人
足踏みペダル式自転車
9か月前
ヤマハ発動機株式会社
車両
4か月前
学校法人千葉工業大学
車両
2か月前
ヤマハ発動機株式会社
車両
4か月前
ヤマハ発動機株式会社
車両
4か月前
ダイハツ工業株式会社
車両
5か月前
学校法人千葉工業大学
車両
2か月前
学校法人千葉工業大学
車両
2か月前
アルインコ株式会社
運搬台車
8か月前
株式会社クボタ
作業車
7か月前
株式会社カインズ
台車
2か月前
株式会社オカムラ
カート装置
10か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ