TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025012514
公報種別
公開特許公報(A)
公開日
2025-01-24
出願番号
2023115394
出願日
2023-07-13
発明の名称
車両制御装置、情報処理装置
出願人
日立Astemo株式会社
代理人
弁理士法人サンネクスト国際特許事務所
主分類
G08G
1/16 20060101AFI20250117BHJP(信号)
要約
【課題】運転支援の作動結果の妥当性(正常作動/誤作動/過剰作動)を適切に判断すること。
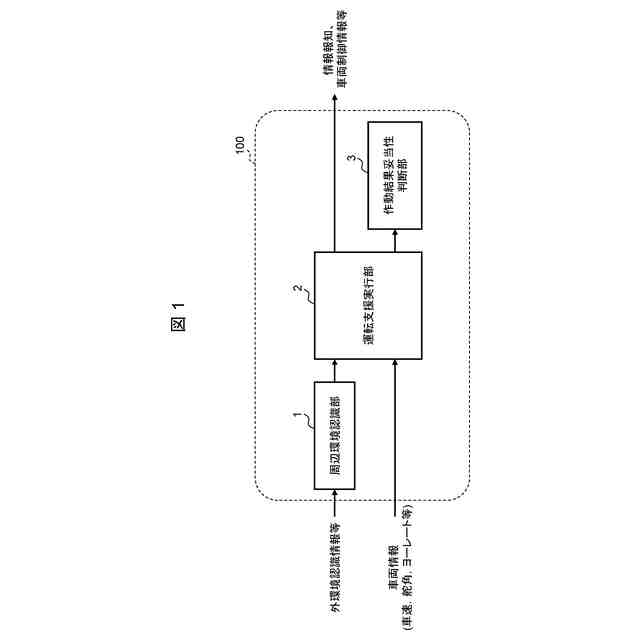
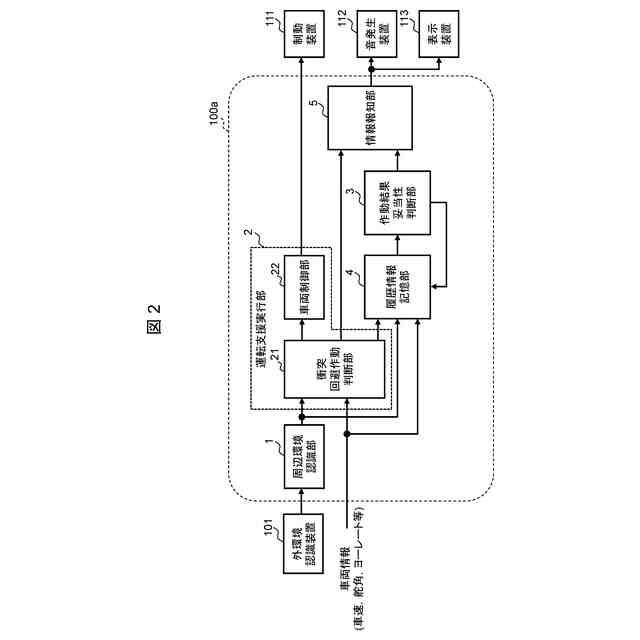
【解決手段】車両制御装置100は、自車両周辺の所定範囲内における走行環境を認識する周辺環境認識部1と、周辺環境認識部1の認識結果に基づいて自車両の運転支援を実行する運転支援実行部2と、運転支援実行部2で自車両の運転支援が実行された後に、周辺環境認識部1の認識結果の時系列変化に基づいて当該運転支援が正常作動であったか否かを判断する作動結果妥当性判断部3とを備える。
【選択図】図1
特許請求の範囲
【請求項1】
自車両周辺の所定範囲内における走行環境を認識する周辺環境認識部と、
前記周辺環境認識部の認識結果に基づいて前記自車両の運転支援を実行する運転支援実行部と、
前記運転支援実行部で前記自車両の運転支援が実行された後に、前記周辺環境認識部の認識結果の時系列変化に基づいて当該運転支援が正常作動であったか否かを判断する作動結果妥当性判断部と、を備える
車両制御装置。
続きを表示(約 1,800 文字)
【請求項2】
前記周辺環境認識部は、前記走行環境の認識結果に基づいて前記自車両に対する障害物を検知し、
前記運転支援実行部は、前記自車両と前記障害物との衝突を予測して前記自車両の衝突回避動作を実行するか否かを判断する衝突回避作動判断部と、前記衝突回避作動判断部の判断結果に基づいて前記衝突回避動作のための車両制御を行って前記運転支援を実行する車両制御部と、を有し、
前記作動結果妥当性判断部は、前記衝突回避作動判断部で前記衝突回避動作を実行すると判断された後に、前記周辺環境認識部の認識結果の時系列変化に基づいて前記衝突回避動作が正常作動であったか否かを判断する
請求項1に記載の車両制御装置。
【請求項3】
前記衝突回避動作に関わる履歴情報を記憶する履歴情報記憶部をさらに備え、
前記履歴情報は、前記周辺環境認識部の認識結果と、前記衝突回避作動判断部による衝突判断時の予測情報と、前記衝突回避動作を実行中および実行後の実計測情報と、を含み、
前記作動結果妥当性判断部は、前記履歴情報における前記周辺環境認識部の認識結果と、前記衝突回避作動判断部による衝突判断時の予測情報と、前記衝突回避動作を実行中および実行後の実計測情報と、の時系列変化に基づいて、前記衝突回避動作が正常作動であったか否かを判断し、
前記履歴情報記憶部は、前記作動結果妥当性判断部の判断結果を前記履歴情報として記憶する
請求項2に記載の車両制御装置。
【請求項4】
前記周辺環境認識部の認識結果は、前記障害物の実位置を含み、
前記予測情報は、前記衝突回避作動判断部が前記自車両と前記障害物との衝突を予測したときのそれぞれの衝突までの予測位置を含み、
前記実計測情報は、前記衝突回避動作を実行中および実行後の前記自車両の実位置を含む
請求項3に記載の車両制御装置。
【請求項5】
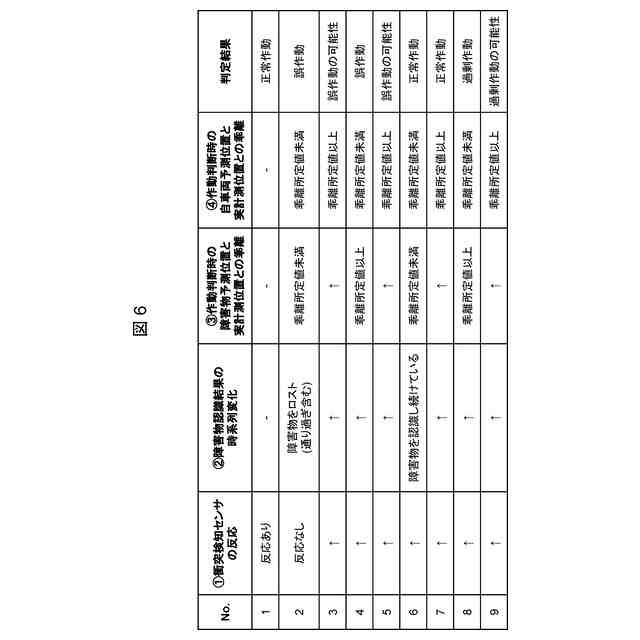
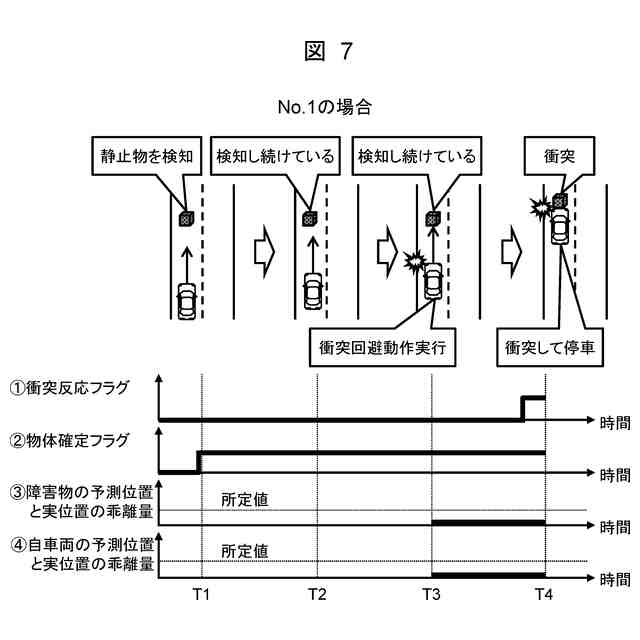
前記作動結果妥当性判断部は、前記自車両と前記障害物との衝突が検知された場合、または、前記自車両と前記障害物との衝突が検知されず、かつ、前記周辺環境認識部が前記障害物を検知し続けていた場合は、前記衝突回避動作が正常作動であった可能性が高いと判断する
請求項4に記載の車両制御装置。
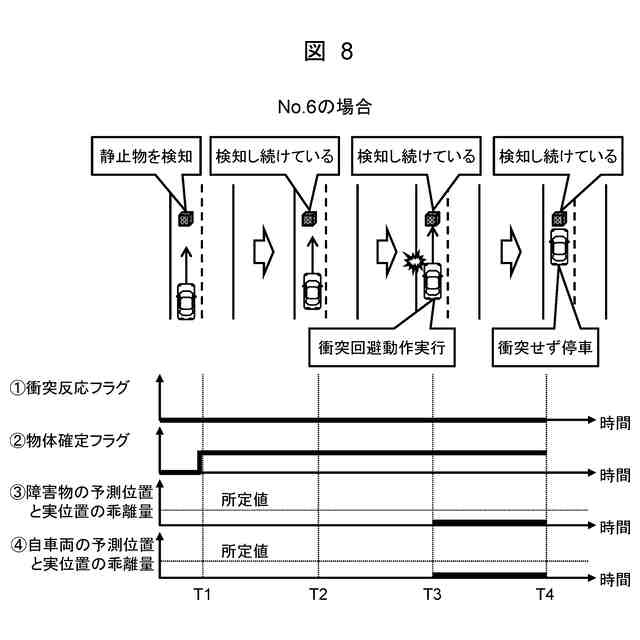
【請求項6】
前記作動結果妥当性判断部は、
前記衝突回避動作が正常作動であった可能性の確度を記憶し、
前記衝突回避動作が正常作動であった可能性が高いと判断した場合であって、前記自車両の前記予測位置と前記実位置との乖離量が所定値以上であるか、前記衝突回避動作を実行中に運転者が前記自車両のブレーキ操作を行った場合には、前記確度を上げる
請求項5に記載の車両制御装置。
【請求項7】
前記作動結果妥当性判断部は、前記自車両が前記予測位置に到達する前に前記周辺環境認識部が前記障害物を検出できなくなり、かつ、前記自車両と前記障害物との衝突が検知されない場合は、前記衝突回避動作が誤作動であった可能性が高いと判断する
請求項4に記載の車両制御装置。
【請求項8】
前記作動結果妥当性判断部は、
前記衝突回避動作が誤作動であった可能性の確度を記憶し、
前記衝突回避動作が誤作動であった可能性が高いと判断した場合であって、前記周辺環境認識部が前記所定範囲よりも近距離で前記障害物を検出した場合は、前記確度を上げる
請求項7に記載の車両制御装置。
【請求項9】
前記作動結果妥当性判断部は、
前記衝突回避動作が誤作動であった可能性の確度を記憶し、
前記衝突回避動作が誤作動であった可能性が高いと判断した場合であって、前記自車両に搭載されている前記障害物を検出するための複数のセンサのうち一つだけが前記障害物を検出した場合には、前記確度を上げる
請求項7に記載の車両制御装置。
【請求項10】
前記作動結果妥当性判断部は、
前記衝突回避動作が誤作動であった可能性の確度を記憶し、
前記衝突回避動作が誤作動であった可能性が高いと判断した場合であって、前記自車両に搭載されている前記障害物を検出可能なセンサが前記障害物を検出していない場合には、前記確度を上げる
請求項7に記載の車両制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両などの移動体において運転支援を実行するための車両制御装置と、この車両制御装置から取得される情報を用いて処理を行う情報処理装置とに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
車載カメラやレーダなどの外界認識センサを用いて自車両周辺の物体(車両、二輪車、自転車、歩行者、構造物など)を検出するための技術が種々提案されている。さらに、これらの技術を用いて、検出した物体との衝突を回避もしくは衝突時の被害を軽減する衝突回避制御技術が開発されている。また、事故が発生した際に、事故の状況を確認したり、事後の原因を追究したりするために、運転操作の情報(例えば、車速、舵角、ブレーキON/OFF、アクセル開閉状態等)や各種演算装置の演算結果(例えば、衝突回避装置の作動有無/作動対象、エアバッグの作動有無、衝突検知センサの出力等)などの情報を履歴情報として記憶する装置が普及してきている。
【0003】
この衝突回避制御技術として、特許文献1がある。特許文献1には安全装置(衝突回避装置)が誤作動したときの位置を記憶し、今後この位置を走行する際に安全装置の作動を抑制することで誤作動を防止する車両用制御装置が開示されている。この中で、安全装置の誤作動に関しては、安全装置が作動してから所定時間内に衝突および衝突回避の運転操作のいずれも検出されなかった場合に誤作動したと判定している。
【先行技術文献】
【特許文献】
【0004】
特開2006-195579号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記従来の手法では、例えば衝突の発生などの回避すべき物理現象が現実に起こったか否かで妥当性を判断しているため、判断精度が粗いという問題がある。また、安全装置が有する運転支援機能の中には、妥当性判断の材料となる物理現象が生じない機能(例えば道路の曲率に基づいて速度を調節する機能や、車線に沿って走行するように操舵量を制御する機能(LKS)等)も存在し、これらの機能については、従来の方法では妥当性を判断することができないという問題もある。
【0006】
本発明は、前述した事情を鑑みてなされたもので、運転支援の作動結果の妥当性(正常作動/誤作動/過剰作動)を適切に判断することを目的とする。
【課題を解決するための手段】
【0007】
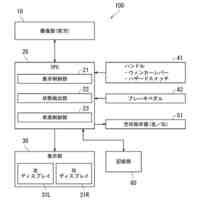
本発明による車両制御装置は、自車両周辺の所定範囲内における走行環境を認識する周辺環境認識部と、前記周辺環境認識部の認識結果に基づいて前記自車両の運転支援を実行する運転支援実行部と、前記運転支援実行部で前記自車両の運転支援が実行された後に、前記周辺環境認識部の認識結果の時系列変化に基づいて当該運転支援が正常作動であったか否かを判断する作動結果妥当性判断部と、を備える。
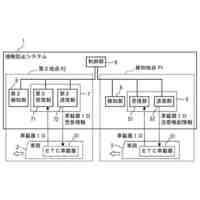
本発明による情報処理装置は、車両周辺の走行環境の認識結果を取得し、前記認識結果に基づく前記車両の運転支援が実行された場合に、前記認識結果の時系列変化に基づいて当該運転支援が正常作動であったか否かを判断する。
【発明の効果】
【0008】
本発明の一態様によれば、運転支援の作動結果の妥当性(正常作動/誤作動/過剰作動)を適切に判断することが可能となる。前述した以外の課題、構成及び効果は、以下の実施例の説明によって明らかにされる。
【図面の簡単な説明】
【0009】
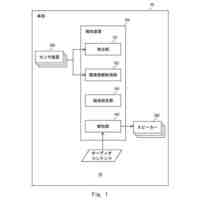
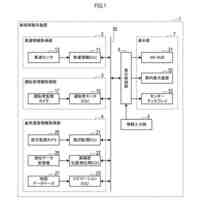
本発明の第1の実施形態に係る車両制御装置の概略構成図である。
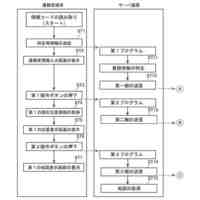
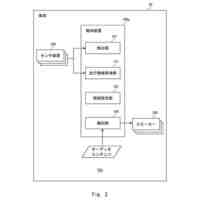
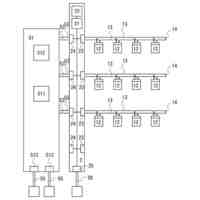
本発明の第2の実施形態に係る車両制御装置の概略構成図である。
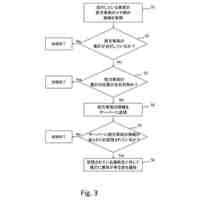
本発明の第2の実施形態に係る車両制御装置の処理全体を示すフローチャートである。
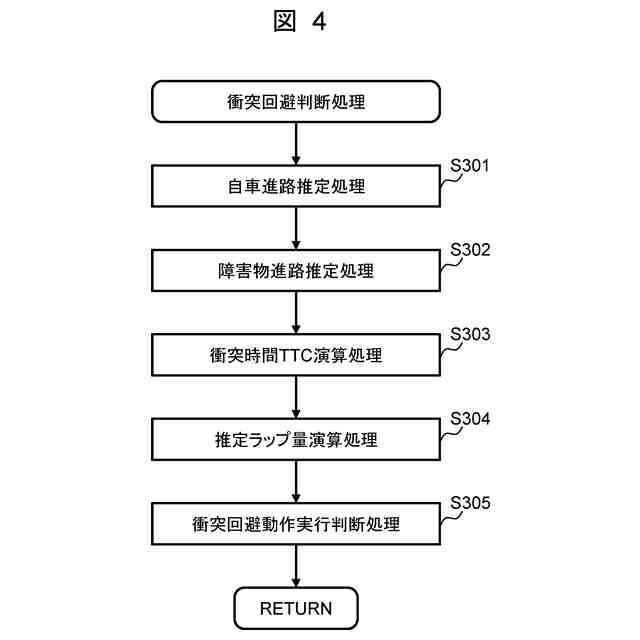
衝突回避判断処理の詳細を示すフローチャートである。
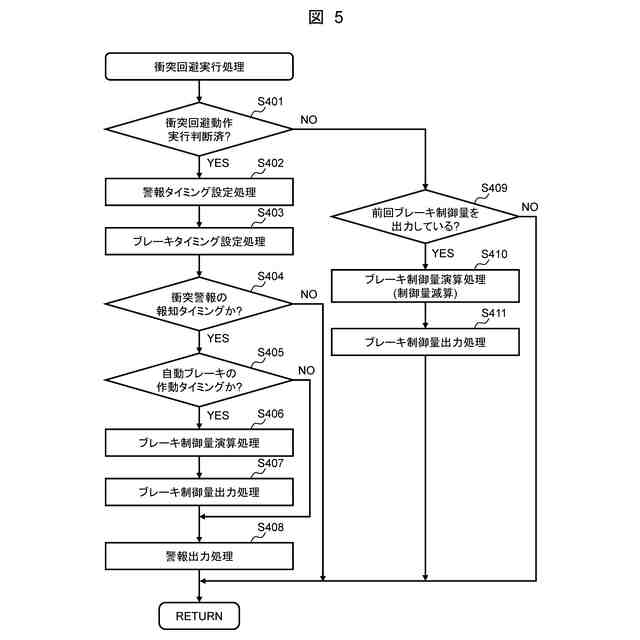
衝突回避実行処理の詳細を示すフローチャートである。
衝突回避動作の作動結果の妥当性判断処理における判定パターン例を示す判定表である。
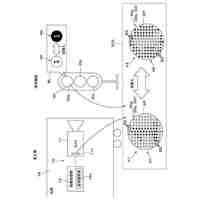
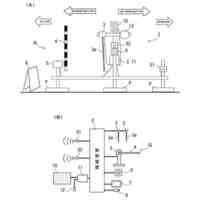
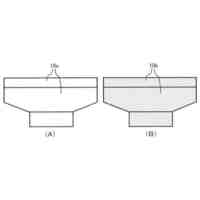
第1の判定パターンに該当するシーンの例を示す図である。
第6の判定パターンに該当するシーンの例を示す図である。
第7の判定パターンに該当するシーンの例を示す図である。
第2の判定パターンに該当するシーンの例を示す図である。
第3の判定パターンに該当するシーンの例を示す図である。
第4の判定パターンに該当するシーンの例を示す図である。
第5の判定パターンに該当するシーンの例を示す図である。
第8の判定パターンに該当するシーンの例を示す図である。
第9の判定パターンに該当するシーンの例を示す図である。
衝突回避動作の作動結果の妥当性に関する報知画面の一例を示す図である。
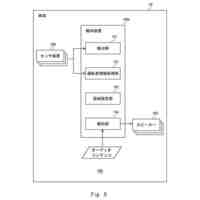
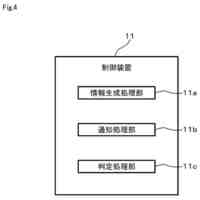
本発明の第3の実施形態に係る車両制御装置の概略構成図である。
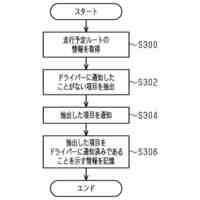
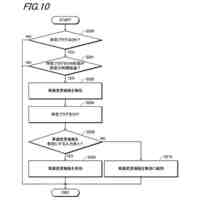
本発明の第3の実施形態に係る車両制御装置の処理全体を示すフローチャートである。
【発明を実施するための形態】
【0010】
以下、本発明の実施例について図面を用いて説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
自動運転車
1か月前
ニッタン株式会社
煙感知器
2か月前
個人
迷子支援システム
23日前
株式会社ニカデン
検出装置
9日前
株式会社サンライン
発炎筒携行容器
1か月前
能美防災株式会社
表示灯カバー
1か月前
株式会社あおい興産
避難誘導灯
17日前
ニッタン株式会社
発信機
23日前
ニッタン株式会社
発信機
23日前
株式会社国際電気
防災システム
4日前
能美防災株式会社
非常放送システム
2か月前
京セラ株式会社
制御装置
23日前
トヨタ自動車株式会社
運転支援システム
2か月前
シャープ株式会社
表示装置
1か月前
トヨタ自動車株式会社
運転支援装置
2か月前
株式会社豊田自動織機
運行表示装置
10日前
日本信号株式会社
信号システム及び信号灯器
16日前
戸田建設株式会社
検知システム
1か月前
株式会社JR西日本テクシア
接触防止システム
16日前
トヨタ自動車株式会社
情報提供システム
1か月前
トヨタ自動車株式会社
ドライブレコーダ
2か月前
株式会社JVCケンウッド
報知装置及び報知方法
23日前
シャープ株式会社
通信装置および通信方法
1か月前
株式会社JVCケンウッド
報知装置及び報知方法
23日前
株式会社IHI
運転支援装置
1か月前
株式会社京三製作所
交通信号制御システム
9日前
本田技研工業株式会社
制御装置
1か月前
株式会社JVCケンウッド
報知装置及び報知方法
23日前
株式会社市川工務店
車両用ゲート開閉装置
1か月前
株式会社デンソー
車両用表示装置
1か月前
光陽無線株式会社
浸水予測システム及びプログラム
1か月前
株式会社デンソー
障害物通知システム
17日前
シャープ株式会社
駐車場管理システム
1か月前
能美防災株式会社
中継器
4日前
株式会社デンソー
運転状況管理システム
11日前
能美防災株式会社
防災機器
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ