TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025012379
公報種別
公開特許公報(A)
公開日
2025-01-24
出願番号
2023115170
出願日
2023-07-13
発明の名称
情報処理装置、制御方法及びプログラム
出願人
キヤノン株式会社
代理人
個人
,
個人
,
個人
主分類
G06T
7/70 20170101AFI20250117BHJP(計算;計数)
要約
【課題】移動体の位置姿勢の計測精度を向上することである
【解決手段】センサによるセンサデータを用いて位置姿勢計測を行う情報処理装置であって、前記センサの計測範囲内の物体ごとに前記位置姿勢計測の精度に影響を与える特性を示す物体変動特性を取得する第一の特性取得手段と、前記物体変動特性を取得した物体に対して干渉する近接物体を決定する近接物体決定手段と、前記近接物体ごとに他の物体に対して干渉することにより前記位置姿勢計測の精度に影響を与える特性を示す物体変動要因特性を取得する第二の特性取得手段と、前記物体変動特性及び前記物体変動要因特性に基づいて前記位置姿勢計測処理において、前記センサの計測範囲内の物体の情報のうち変動が推定される情報の利用を制限するように制御する位置姿勢計測制御手段と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
センサによるセンサデータを用いて位置姿勢計測を行う情報処理装置であって、
前記センサの計測範囲内の物体ごとに前記位置姿勢計測の精度に影響を与える特性を示す物体変動特性を取得する第一の特性取得手段と、
前記物体変動特性を取得した物体に対して干渉する近接物体を決定する近接物体決定手段と、
前記近接物体ごとに他の物体に対して干渉することにより前記位置姿勢計測の精度に影響を与える特性を示す物体変動要因特性を取得する第二の特性取得手段と、
前記物体変動特性及び前記物体変動要因特性に基づいて前記位置姿勢計測において、前記センサの計測範囲内の物体の情報のうち変動が推定される情報の利用を制限するように制御する位置姿勢計測制御手段と、
を備えることを特徴とする情報処理装置。
続きを表示(約 1,900 文字)
【請求項2】
前記物体変動特性は、物体の移動、回転もしくは外見の変化を起こす機能の有無、又は物体の移動、回転若しくは外見の変化を起こす可能性の高さを表す情報であり、
前記物体変動要因特性は、物体の他の物体を移動、回転もしくは外見を変化させる機能の有無、又は物体の他の物体を移動、回転もしくは外見を変化させる可能性の高さを表す情報であること、
を特徴とする請求項1に記載の情報処理装置。
【請求項3】
前記物体変動特性を評価する物体変動特性評価手段を有し、
前記物体変動特性評価手段は、物体種別情報及び物体の空間中の三次元的な位置関係を関連づけて保持する物体配置特性データベースに基づいて前記物体変動特性を評価する
ことを特徴とする請求項1に記載の情報処理装置。
【請求項4】
前記物体変動要因特性を評価する物体変動要因特性評価手段を有し、
前記物体変動要因特性評価手段は、物体種別情報及び物体の空間中の三次元的な位置関係を関連づけて保持する物体配置特性データベースに基づいて前記物体変動要因特性を評価する
ことを特徴とする請求項1に記載の情報処理装置。
【請求項5】
センサによるセンサデータを用いて位置姿勢計測を行う情報処理装置であって、
前記センサの計測範囲内の物体ごとに前記位置姿勢計測の精度に影響を与える特性を示す物体変動特性を取得する第一の特性取得手段と、
前記物体変動特性を取得した物体が存在する領域を決定する領域決定手段と、
前記領域の前記位置姿勢計測の精度に影響を与える特性を示す領域変動特性を取得する領域特性取得手段と、
前記物体変動特性及び前記領域変動特性に基づいて前記位置姿勢計測において、前記センサの計測範囲内の物体の情報のうち変動が推定される情報の利用を制限するように制御する位置姿勢計測制御手段と、
を備えることを特徴とする情報処理装置。
【請求項6】
前記領域変動特性は、前記領域内の物体に移動、回転もしくは外見の変化を起こす機能の有無、又は前記領域内の物体に移動、回転もしくは外見の変化を起こす可能性の高さを表す情報である
ことを特徴とする請求項5に記載の情報処理装置。
【請求項7】
前記領域変動特性を評価する領域変動特性評価手段を有し、
前記領域変動特性評価手段は、物体種別情報及び物体の空間中の三次元的な位置関係を関連づけて保持する物体配置特性データベースに基づいて前記領域変動特性を評価する
ことを特徴とする請求項6に記載の情報処理装置。
【請求項8】
センサによるセンサデータを用いて位置姿勢計測を行う情報処理装置の制御方法であって、
前記センサの計測範囲内の物体ごとに前記位置姿勢計測の精度に影響を与える特性を示す物体変動特性を取得する第一の特性取得工程と、
前記物体変動特性を取得した物体に対して干渉する近接物体を決定する近接物体決定工程と、
前記近接物体ごとに他の物体に対して干渉することにより前記位置姿勢計測の精度に影響を与える特性を示す物体変動要因特性を取得する第二の特性取得工程と、
前記物体変動特性及び前記物体変動要因特性に基づいて前記位置姿勢計測において、前記センサの計測範囲内の物体の情報のうち変動が推定される情報の利用を制限するように制御する位置姿勢計測制御工程と、
を備えることを特徴とする制御方法。
【請求項9】
センサによるセンサデータを用いて位置姿勢計測を行う情報処理装置の制御方法であって、
前記センサの計測範囲内の物体ごとに前記位置姿勢計測の精度に影響を与える特性を示す物体変動特性を取得する第一の特性取得工程と、
前記物体変動特性を取得した物体が存在する領域を決定する領域決定工程と、
前記領域の前記位置姿勢計測の精度に影響を与える特性を示す領域変動特性を取得する領域特性取得工程と、
前記物体変動特性及び前記領域変動特性に基づいて前記位置姿勢計測において、前記センサの計測範囲内の物体の情報のうち変動が推定される情報の利用を制限するように制御する位置姿勢計測制御工程と、
を備えることを特徴とする制御方法。
【請求項10】
請求項1から請求項7のいずれか一項に記載の各手段としてコンピュータを機能させるためのプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、情報処理装置、制御方法及びプログラムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
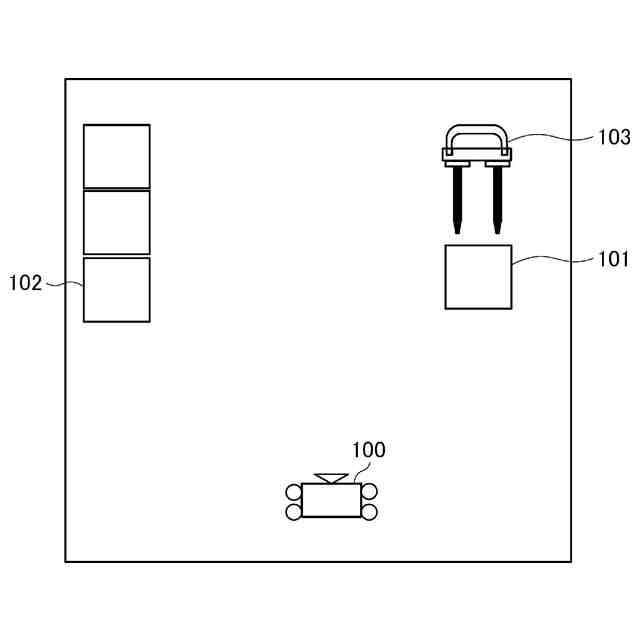
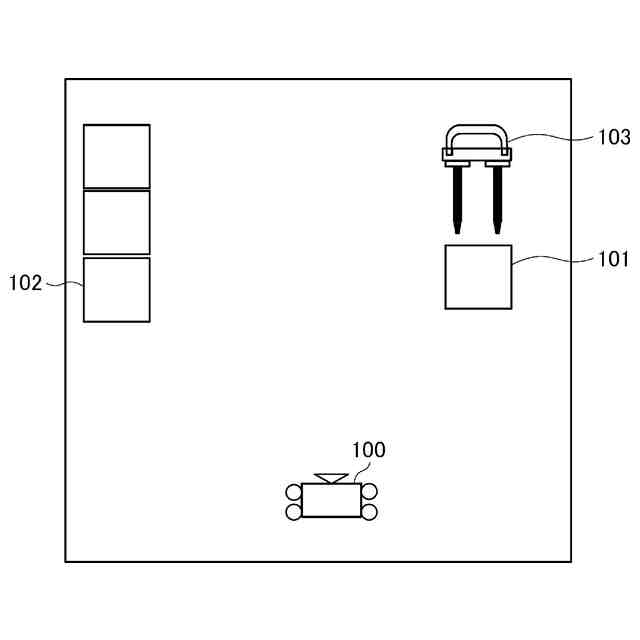
現在、オフィスビル、住宅、物流センター等の様々な場所で自律的に移動し、仕事を行う自律運転型ロボット(以下、「移動体」という)の技術がある。このような移動体は、撮影した画像から特徴点を算出することにより、点群データ、特徴点の集合等の地図として空間を把握し、地図と移動体の周辺環境を比較することで自律的に移動する。
【0003】
特許文献1では、自動車の車載カメラで撮影した画像から、物体の見かけの変化量を算出し、変化量から衝突する危険性の低い物体を認識し撮像画像から除外することで、衝突回避処理の負荷低減をする発明を開示している。
【先行技術文献】
【特許文献】
【0004】
特開2022-17612号公報
【0005】
Josephら、“You Only Look Once: Unified, Real-Time Object Detection”. CVPR 2016
Ashishら、 “Attention is All you Need”, NeuralIPS2017
Jacobら、 “BERT: Pre-training of Deep Bidirectional Transformers for Language Understanding”, arXiv 2018
Benjaminら、“I2T:Image Parsing to Text Description,”IEEE,
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、特許文献1では特徴の変化する物体を認識できないことがあった。その結果、特徴が変化する物体によって位置姿勢計測の精度の低下を引き起こしていた。
【0007】
本発明は上記課題に鑑みてなされたものであり、移動体の位置姿勢の計測精度を向上することを目的とする。
【課題を解決するための手段】
【0008】
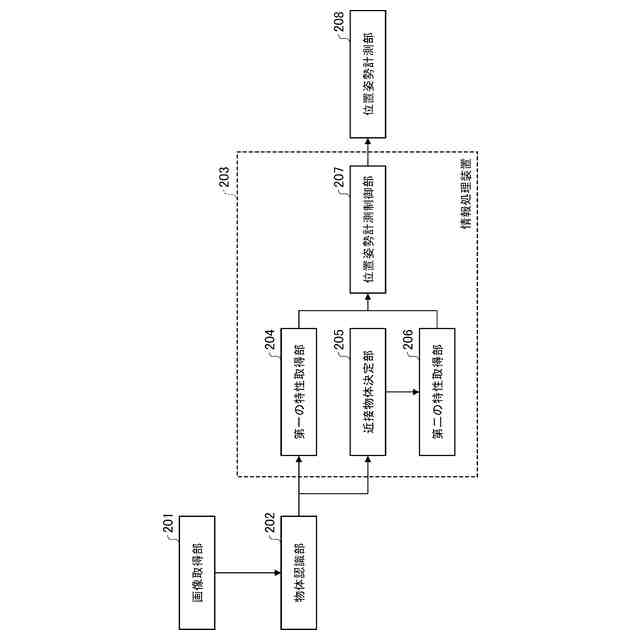
本発明の一実施形態の情報処理装置は、センサによるセンサデータを用いて位置姿勢計測を行う情報処理装置であって、前記センサの計測範囲内の物体ごとに前記位置姿勢計測の精度に影響を与える特性を示す物体変動特性を取得する第一の特性取得手段と、前記物体変動特性を取得した物体に対して干渉する近接物体を決定する近接物体決定手段と、前記近接物体ごとに他の物体に対して干渉することにより前記位置姿勢計測の精度に影響を与える特性を示す物体変動要因特性を取得する第二の特性取得手段と、前記物体変動特性及び前記物体変動要因特性に基づいて前記位置姿勢計測において、前記センサの計測範囲内の物体の情報のうち変動が推定される情報の利用を制限するように制御する位置姿勢計測制御手段と、を備えることを特徴とする。
【発明の効果】
【0009】
本発明によれば、移動体の位置姿勢の計測精度を向上することができる。
【図面の簡単な説明】
【0010】
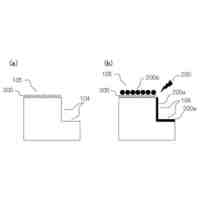
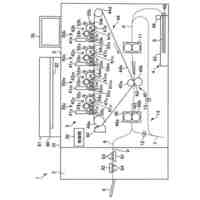
本発明の実施例1の利用場面例を示す図である。
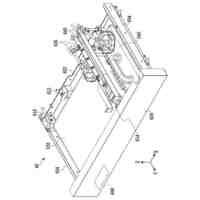
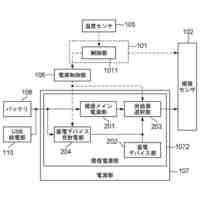
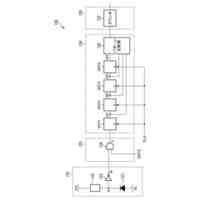
本発明の実施例1に係る情報処理装置を備える移動体システムの構成図である。
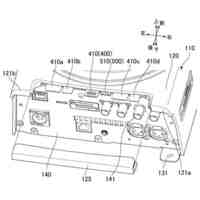
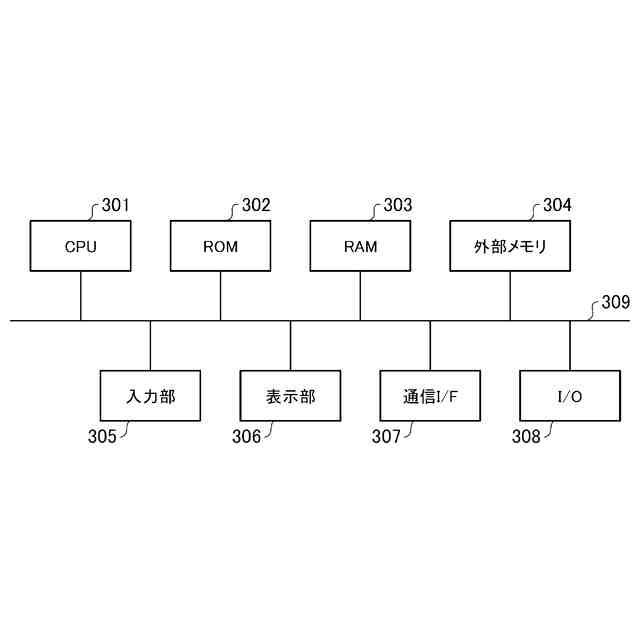
本発明の実施例1に係る情報処理装置のハードウェア構成図である。
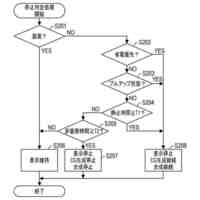
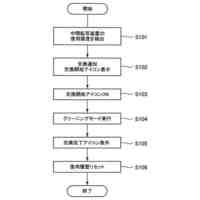
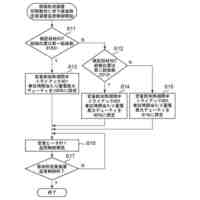
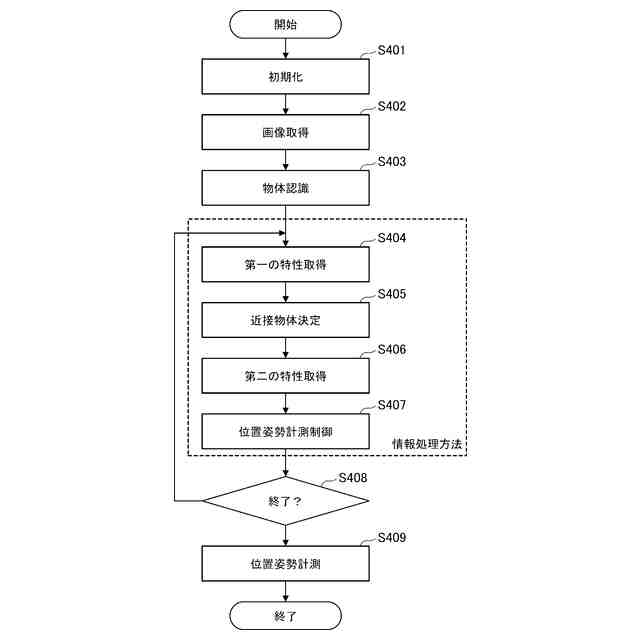
本発明の実施例1に係る情報処理装置を備える移動体システムの処理の流れを示すフローチャートである。
本発明の実施例1に係る情報処理装置を備える移動体システムのGUIの説明図である。
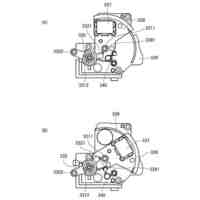
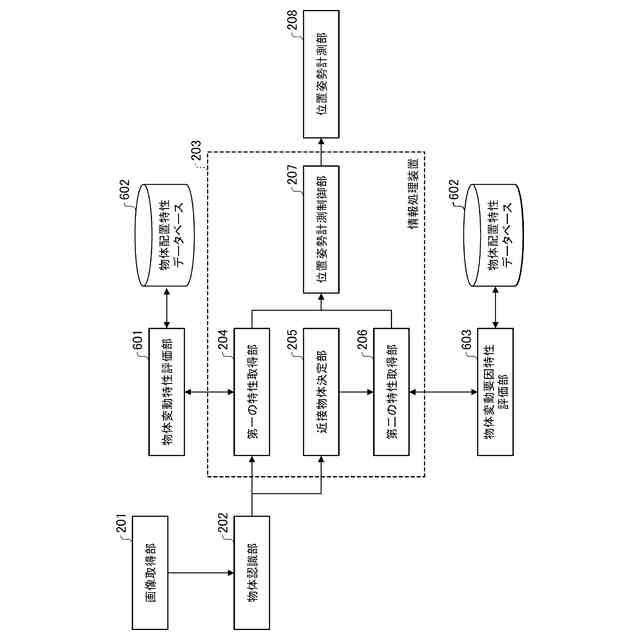
本発明の実施例1の変形例に係る情報処理装置を備える移動体システムの構成図である。
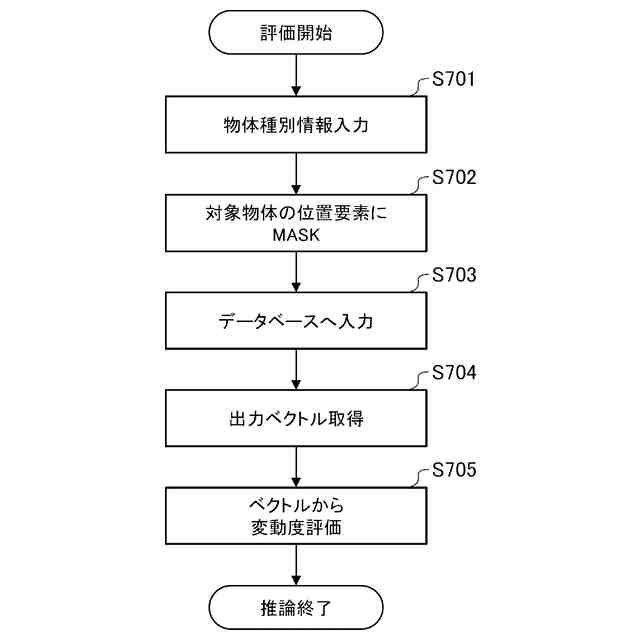
本発明の実施例1の変形例に係る情報処理装置の変動度取得の詳細の流れを示すフローチャートである。
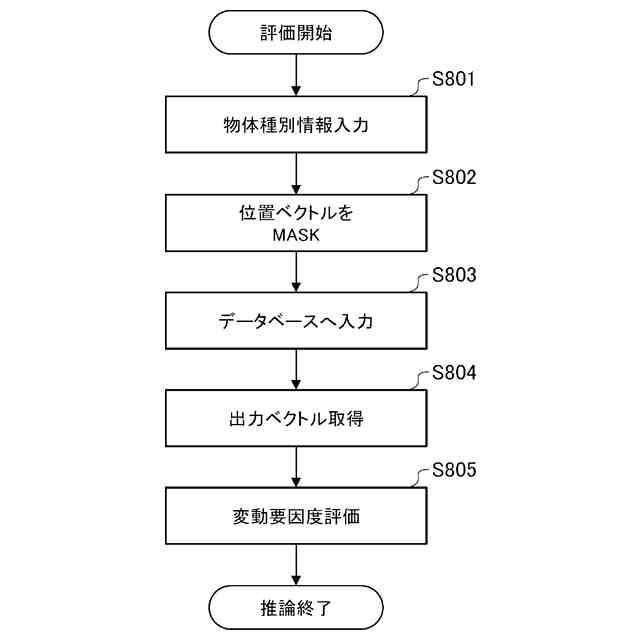
本発明の実施例1の変形例に係る情報処理装置の変動要因度取得の詳細の流れを示すフローチャートである。
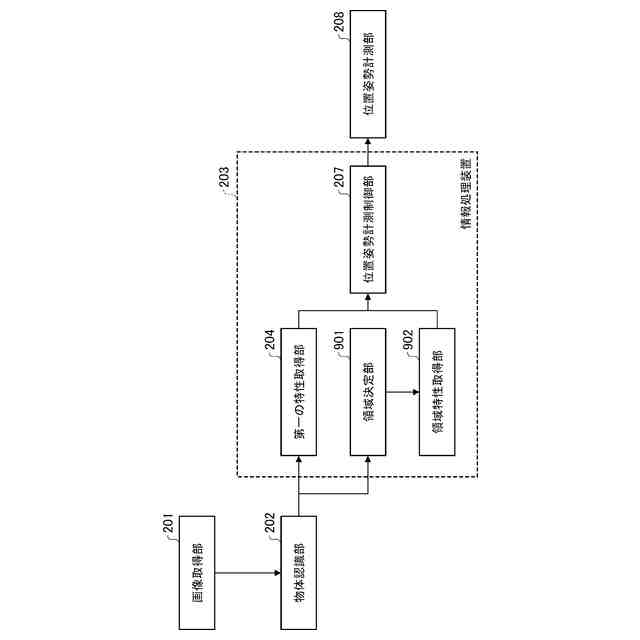
本発明の実施例2に係る情報処理装置を備える移動体システムの構成図である。
本発明の実施例2に係る情報処理装置を備える移動体システムの処理の流れを示すフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
キヤノン株式会社
電子機器
4日前
キヤノン株式会社
記録装置
3日前
キヤノン株式会社
撮像装置
3日前
キヤノン株式会社
撮像装置
3日前
キヤノン株式会社
撮像装置
3日前
キヤノン株式会社
記録装置
3日前
キヤノン株式会社
操作装置
4日前
キヤノン株式会社
記録装置
11日前
キヤノン株式会社
記録装置
11日前
キヤノン株式会社
撮像装置
11日前
キヤノン株式会社
撮像装置
11日前
キヤノン株式会社
制御装置
10日前
キヤノン株式会社
電子機器
7日前
キヤノン株式会社
定着装置
10日前
キヤノン株式会社
乾燥装置
19日前
キヤノン株式会社
定着装置
3日前
キヤノン株式会社
トナー容器
10日前
キヤノン株式会社
レンズ鏡筒
10日前
キヤノン株式会社
トナー容器
10日前
キヤノン株式会社
液体吐出装置
18日前
キヤノン株式会社
画像読取装置
7日前
キヤノン株式会社
液体吐出装置
11日前
キヤノン株式会社
画像形成装置
7日前
キヤノン株式会社
画像形成装置
7日前
キヤノン株式会社
液体吐出装置
3日前
キヤノン株式会社
画像形成装置
10日前
キヤノン株式会社
画像形成装置
7日前
キヤノン株式会社
画像形成装置
11日前
キヤノン株式会社
光電変換装置
3日前
キヤノン株式会社
画像形成装置
3日前
キヤノン株式会社
画像形成装置
18日前
キヤノン株式会社
画像形成装置
10日前
キヤノン株式会社
画像形成装置
11日前
キヤノン株式会社
情報処理装置
18日前
キヤノン株式会社
画像形成装置
18日前
キヤノン株式会社
画像形成装置
10日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ