TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025011867
公報種別
公開特許公報(A)
公開日
2025-01-24
出願番号
2023114250
出願日
2023-07-12
発明の名称
車載ソーラパネル用の電力制御装置
出願人
日本特殊陶業株式会社
代理人
弁理士法人グランダム特許事務所
主分類
G05F
1/67 20060101AFI20250117BHJP(制御;調整)
要約
【課題】車載ソーラパネル用の電力制御装置において、最大電力点の検出及び追従を迅速に行う。
【解決手段】車載ソーラパネル用の電力制御装置10の制御部28は、各々の電力変換部30の第1探索制御を他の電力変換部30の第1探索制御とは期間をずらすように複数の電力変換部30の各々の第1探索制御を順番に行う。制御部28は、複数の電力変換部30の各々の第1探索制御を行った後、各々の電力変換部30の第2探索制御を他の電力変換部30の第2探索制御とは期間をずらすように複数の電力変換部30の各々の第2探索制御を順番に行う。制御部28は、各々の電力変換部30に対し、第1探索制御を行った後の第2探索制御までの間に電力変換部30の一方側の電力を第1最大電力に基づく電力に追従させる仮追従制御を行う。
【選択図】図1
特許請求の範囲
【請求項1】
1以上のソーラパネルを有するソーラパネル部が複数搭載された車両において、複数の前記ソーラパネル部から入力される電力を制御する電力制御装置であって、
導電路に対して電力を出力し得る複数の電力変換部と、
複数の前記電力変換部を制御する制御部と、
前記導電路を介して充放電される蓄電部と、
を有し、
各々の前記電力変換部は、自身に対応する前記ソーラパネル部から供給される電力に基づく入力電力を昇圧又は降圧するように変換し、前記導電路に出力電力を供給する電力変換を行い、
前記制御部は、各々の前記電力変換部に対し、探索制御を行った後に追従制御を行う電力調整制御を繰り返し実行し、
前記探索制御は、第1探索制御と第2探索制御とを含み、
前記第1探索制御は、前記電力変換部の入力側及び出力側のうち一方側の電圧を第1電圧幅で段階的に増加させ、又は、減少させ、前記第1電圧幅の各段階での前記一方側の電力のうち最大の電力である第1最大電力を検出する制御であり、
前記第2探索制御は、前記第1探索制御における前記第1最大電力での前記一方側の電圧の値よりも小さく且つ前記第1探索制御の前記各段階のうちの最も低い電圧値よりも大きい中間電圧値から前記第1電圧幅よりも小さい第2電圧幅で前記一方側の電圧を段階的に増加させ、又は、前記第1探索制御における前記第1最大電力での前記一方側の電圧の値よりも大きく且つ前記第1探索制御の前記各段階のうちの最も高い電圧値よりも小さい電圧値から前記第2電圧幅で前記一方側の電圧を段階的に減少させ、前記第2電圧幅の各段階での前記一方側の電力のうち最大の電力である第2最大電力を検出する制御であり、
前記追従制御は、前記電力変換部の前記一方側の電力を前記探索制御で検出された前記第2最大電力に追従させる制御であり、
前記制御部は、
各々の前記電力変換部の前記第1探索制御を他の前記電力変換部の前記第1探索制御とは期間をずらすように複数の前記電力変換部の各々の前記第1探索制御を順番に行った後、各々の前記電力変換部の前記第2探索制御を他の前記電力変換部の前記第2探索制御とは期間をずらすように複数の前記電力変換部の各々の前記第2探索制御を順番に行い、
各々の前記電力変換部に対し、前記第1探索制御を行った後の前記第2探索制御までの間に前記一方側の電力を前記第1最大電力に基づく電力に追従させる仮追従制御を行う
車載ソーラパネル用の電力制御装置。
続きを表示(約 400 文字)
【請求項2】
前記制御部は、
前記第1探索制御において前記中間電圧値のときに検出される前記一方側の電力が閾値以下である場合には、当該第1探索制御に対応する前記第2探索制御において前記第2電圧幅を第1の値に設定して前記第2探索制御を開始し、
前記第1探索制御において前記中間電圧値のときに検出される前記一方側の電力が前記閾値を超える場合には、当該第1探索制御に対応する前記第2探索制御において前記第2電圧幅を前記第1の値よりも小さい値に設定して前記第2探索制御を開始する
請求項1に記載の車載ソーラパネル用の電力制御装置。
【請求項3】
前記制御部は、複数の前記電力変換部のうち、対応付けられた前記ソーラパネル部の発電能力が大きい前記電力変換部から順に前記第1探索制御を行う
請求項1又は請求項2に記載の車載ソーラパネル用の電力制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車載ソーラパネル用の電力制御装置に関するものである。
続きを表示(約 3,400 文字)
【背景技術】
【0002】
特許文献1には、太陽電池パネルを搭載した車両に関する技術が開示されている。この技術では、制御装置は、太陽電池パネルの出力電圧と出力電流とに基づいて、太陽電池パネルから最大の出力電力が得られるようにMPPT(Maximum Power Point Tracking)方式で電力変換器を制御する。
【先行技術文献】
【特許文献】
【0003】
特開2021-62841号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
車両に搭載されるソーラパネルは、車両の移動に伴って太陽に対する相対位置が変化するため、建造物や木々などによって太陽が遮られるような状況が急に生じやすく、例えば、トンネル、ビル、木陰、日なたなど、周囲の環境が高速に切り替わることも多い。このように、短時間に環境が急激に変わりやすいソーラパネルを制御対象にする場合、一般的なMPPT制御の手法では最大電力点の探索や追従が間に合わず、効率の低下を招く懸念がある。
【0005】
本発明は、上述した課題の少なくとも一つを解決するためになされたものであり、車載ソーラパネル用の電力制御装置において、最大電力点の検出及び追従を迅速に行うことを目的とする。
【課題を解決するための手段】
【0006】
本開示の車載ソーラパネル用の電力制御装置は、
1以上のソーラパネルを有するソーラパネル部が複数搭載された車両において、複数の前記ソーラパネル部から入力される電力を制御する電力制御装置であって、
導電路に対して電力を出力し得る複数の電力変換部と、
複数の前記電力変換部を制御する制御部と、
前記導電路を介して充放電される蓄電部と、
を有し、
各々の前記電力変換部は、自身に対応する前記ソーラパネル部から供給される電力に基づく入力電力を昇圧又は降圧するように変換し、前記導電路に出力電力を供給する電力変換を行い、
前記制御部は、各々の前記電力変換部に対し、探索制御を行った後に追従制御を行う電力調整制御を繰り返し実行し、
前記探索制御は、第1探索制御と第2探索制御とを含み、
前記第1探索制御は、前記電力変換部の入力側及び出力側のうち一方側の電圧を第1電圧幅で段階的に増加させ、又は、減少させ、前記第1電圧幅の各段階での前記一方側の電力のうち最大の電力である第1最大電力を検出する制御であり、
前記第2探索制御は、前記第1探索制御における前記第1最大電力での前記一方側の電圧の値よりも小さく且つ前記第1探索制御の前記各段階のうちの最も低い電圧値よりも大きい中間電圧値から前記第1電圧幅よりも小さい第2電圧幅で前記一方側の電圧を段階的に増加させ、又は、前記第1探索制御における前記第1最大電力での前記一方側の電圧の値よりも大きく且つ前記第1探索制御の前記各段階のうちの最も高い電圧値よりも小さい電圧値から前記第2電圧幅で前記一方側の電圧を段階的に減少させ、前記第2電圧幅の各段階での前記一方側の電力のうち最大の電力である第2最大電力を検出する制御であり、
前記追従制御は、前記電力変換部の前記一方側の電力を前記探索制御で検出された前記第2最大電力に追従させる制御であり、
前記制御部は、
各々の前記電力変換部の前記第1探索制御を他の前記電力変換部の前記第1探索制御とは期間をずらすように複数の前記電力変換部の各々の前記第1探索制御を順番に行った後、各々の前記電力変換部の前記第2探索制御を他の前記電力変換部の前記第2探索制御とは期間をずらすように複数の前記電力変換部の各々の前記第2探索制御を順番に行い、
各々の前記電力変換部に対し、前記第1探索制御を行った後の前記第2探索制御までの間に前記一方側の電力を前記第1最大電力に基づく電力に追従させる仮追従制御を行う。
【発明の効果】
【0007】
本開示によれば、車載ソーラパネル用の電力制御装置において、最大電力点の検出及び追従を迅速に行うことができる。
【図面の簡単な説明】
【0008】
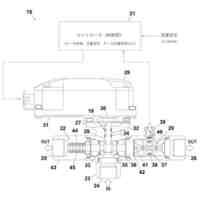
図1は、第1実施形態に係る車載ソーラパネル用の電力制御装置を含む車両の構成を概略的に例示するブロック図である。
図2は、図1の電力制御装置に含まれるMPPT回路及び制御部を概略的に例示する回路図である。
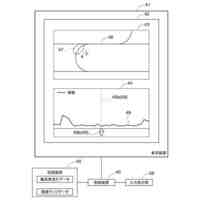
図3は、第1探索制御中における、経過時間と入力電流との関係、経過時間と入力電圧との関係、経過時間と入力電力との関係を対応させて示すグラフである。
図4は、第1探索制御中に入力電圧を段階的に上昇させる場合の1ステップの期間や電圧上昇幅などの関係を説明する説明図である。
図5は、第2探索制御中に入力電圧を段階的に上昇させる場合の1ステップの期間や電圧上昇幅などの関係を説明する説明図である。
図6は、制御部が行う処理の流れを示すフローチャートの前半部分である。
図7は、制御部が行う処理の流れを示すフローチャートの後半部分である。
図8は、各々の電力変換部に対する第1探索制御、仮追従制御、第2探索制御、及び追従制御の実行タイミングを示すタイミングチャートである。
【発明を実施するための形態】
【0009】
[本開示の実施形態の説明]
以下では、本開示の実施形態が列記されて例示される。
【0010】
〔1〕1以上のソーラパネルを有するソーラパネル部が複数搭載された車両において、複数の前記ソーラパネル部から入力される電力を制御する電力制御装置であって、
導電路に対して電力を出力し得る複数の電力変換部と、
複数の前記電力変換部を制御する制御部と、
前記導電路を介して充放電される蓄電部と、
を有し、
各々の前記電力変換部は、自身に対応する前記ソーラパネル部から供給される電力に基づく入力電力を昇圧又は降圧するように変換し、前記導電路に出力電力を供給する電力変換を行い、
前記制御部は、各々の前記電力変換部に対し、探索制御を行った後に追従制御を行う電力調整制御を繰り返し実行し、
前記探索制御は、第1探索制御と第2探索制御とを含み、
前記第1探索制御は、前記電力変換部の入力側及び出力側のうち一方側の電圧を第1電圧幅で段階的に増加させ、又は、減少させ、前記第1電圧幅の各段階での前記一方側の電力のうち最大の電力である第1最大電力を検出する制御であり、
前記第2探索制御は、前記第1探索制御における前記第1最大電力での前記一方側の電圧の値よりも小さく且つ前記第1探索制御の前記各段階のうちの最も低い電圧値よりも大きい中間電圧値から前記第1電圧幅よりも小さい第2電圧幅で前記一方側の電圧を段階的に増加させ、又は、前記第1探索制御における前記第1最大電力での前記一方側の電圧の値よりも大きく且つ前記第1探索制御の前記各段階のうちの最も高い電圧値よりも小さい電圧値から前記第2電圧幅で前記一方側の電圧を段階的に減少させ、前記第2電圧幅の各段階での前記一方側の電力のうち最大の電力である第2最大電力を検出する制御であり、
前記追従制御は、前記電力変換部の前記一方側の電力を前記探索制御で検出された前記第2最大電力に追従させる制御であり、
前記制御部は、
各々の前記電力変換部の前記第1探索制御を他の前記電力変換部の前記第1探索制御とは期間をずらすように複数の前記電力変換部の各々の前記第1探索制御を順番に行った後、各々の前記電力変換部の前記第2探索制御を他の前記電力変換部の前記第2探索制御とは期間をずらすように複数の前記電力変換部の各々の前記第2探索制御を順番に行い、
各々の前記電力変換部に対し、前記第1探索制御を行った後の前記第2探索制御までの間に前記一方側の電力を前記第1最大電力に基づく電力に追従させる仮追従制御を行う
車載ソーラパネル用の電力制御装置。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
無人作業システム
1か月前
村田機械株式会社
産業機械
1か月前
アズビル株式会社
制御装置
1か月前
コフロック株式会社
流量制御装置
1か月前
トヨタ自動車株式会社
自律移動体
1か月前
株式会社クボタ
作業車
1か月前
スター精密株式会社
工作機械
5日前
株式会社丸和製作所
入力機器
1か月前
株式会社豊田自動織機
荷役車両
1か月前
株式会社明電舎
車両
1か月前
株式会社フジキン
流量制御装置
1か月前
アズビル株式会社
パラメータ調整装置
2か月前
トヨタ自動車株式会社
ロボットシステム
2か月前
株式会社ダイフク
搬送設備
1か月前
株式会社村田製作所
温度補償回路
1か月前
株式会社シンテックホズミ
搬送ロボット
20日前
トヨタ自動車株式会社
ロボットシステム
1か月前
キヤノン株式会社
情報処理装置
2か月前
株式会社ダイフク
物品搬送設備
1か月前
国立大学法人広島大学
モデル誤差抑制補償器
10日前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
24日前
株式会社ダイフク
物品搬送設備
1か月前
旭精機工業株式会社
監視データ処理装置
1か月前
東フロコーポレーション株式会社
流量制御装置
2か月前
ルネサスエレクトロニクス株式会社
半導体装置
1か月前
ブラザー工業株式会社
数値制御装置及び工作機械
1か月前
株式会社ダイフク
情報表示システム
2か月前
トヨタ自動車株式会社
自律走行装置
10日前
チームラボ株式会社
走行システム及び走行路
3日前
株式会社ディスコ
搬送車
2か月前
ローム株式会社
半導体装置
10日前
ミツミ電機株式会社
電源回路及びその起動方法
10日前
日本精工株式会社
制御システムおよび制御方法
10日前
株式会社日立製作所
診断装置および診断方法
2か月前
株式会社FUJI
工作機械
1か月前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ