TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025011549
公報種別
公開特許公報(A)
公開日
2025-01-24
出願番号
2023113733
出願日
2023-07-11
発明の名称
環境認識装置および環境認識方法
出願人
日立Astemo株式会社
代理人
弁理士法人開知
主分類
G08G
1/16 20060101AFI20250117BHJP(信号)
要約
【課題】カメラ画像による路面状態の検知性能が低下する状況下であっても適切な車両制御を行うことが可能な環境認識装置および環境認識方法を提供する。
【解決手段】車両の車外を撮像する複数の撮像装置により取得された複数の画像に基づいて外界環境を認識する、演算装置を備えた環境認識装置であって、演算装置は、複数の画像から得られる視差情報に基づいて、画像に撮像された路面に存在する路上構造物の候補を示す第1の路上構造物候補を検知し、視差情報及び画像の濃淡情報に基づいて、画像に撮像された路面に存在する路上構造物の候補を示す第2の路上構造物候補を検知し、第1の路上構造物候補および第2の路上構造物候補に関する検知結果に基づいて、路上構造物の位置および大きさを求め、位置および大きさを求めた路上構造物に関する情報を車両の車両制御装置に出力する。
【選択図】図1
特許請求の範囲
【請求項1】
車両の車外を撮像する複数の撮像装置により取得された複数の画像に基づいて外界環境を認識する、演算装置を備えた環境認識装置であって、
前記演算装置は、
複数の前記画像から得られる視差情報に基づいて、前記画像に撮像された路面に存在する路上構造物の候補を示す第1の路上構造物候補を検知し、
前記視差情報及び前記画像の濃淡情報に基づいて、前記画像に撮像された路面に存在する路上構造物の候補を示す第2の路上構造物候補を検知し、
前記第1の路上構造物候補および前記第2の路上構造物候補に関する検知結果に基づいて、路上構造物の位置および大きさを求め、
位置および大きさを求めた前記路上構造物に関する情報を前記車両の車両制御装置に出力する、
環境認識装置。
続きを表示(約 1,500 文字)
【請求項2】
請求項1に記載の環境認識装置において、
前記演算装置は、前記第1の路上構造物候補および前記第2の路上構造物候補に関する検知結果に応じて、前記路上構造物の位置および大きさの計測信頼度を求め、前記計測信頼度に応じて前記車両の制御内容を示す制御情報を前記車両制御装置に出力する、環境認識装置。
【請求項3】
請求項2に記載の環境認識装置において、
前記演算装置は、前記第1の路上構造物候補または前記第2の路上構造物候補の少なくとも一方が検知された場所までの距離に基づいて、前記計測信頼度を求める、環境認識装置。
【請求項4】
請求項2に記載の環境認識装置において、
前記演算装置は、前記第1の路上構造物候補または前記第2の路上構造物候補の少なくとも一方が所定の時間内に検知された回数に基づいて前記計測信頼度を求める、環境認識装置。
【請求項5】
請求項2に記載の環境認識装置において、
前記演算装置は、前記第1の路上構造物候補および前記第2の路上構造物候補に関する検知結果の一致度に基づいて前記計測信頼度を求める、環境認識装置。
【請求項6】
請求項2に記載の環境認識装置において、
前記演算装置は、前記第1の路上構造物候補および前記第2の路上構造物候補が存在する路面の撮像状況に基づいて前記計測信頼度を求める、環境認識装置。
【請求項7】
請求項1に記載の環境認識装置において、
前記演算装置は、前記第1の路上構造物候補および前記第2の路上構造物候補の一方のみを検知した場合、当該路上構造物の候補を検知した検知結果に基づいて路上構造物の距離および大きさを求める、環境認識装置。
【請求項8】
請求項1に記載の環境認識装置において、
前記演算装置は、前記第1の路上構造物候補および前記第2の路上構造物候補を検知した場合、前記第1の路上構造物候補または前記第2の路上構造物候補の少なくとも一方が検知された場所までの距離に基づいて路上構造物の距離および大きさを求める、環境認識装置。
【請求項9】
請求項1に記載の環境認識装置において、
前記演算装置は、
前記車両の自車位置を取得し、
前記路上構造物に関する情報と、当該路上構造物の位置および大きさを求めたときの前記自車位置と、を対応付けて記録し、
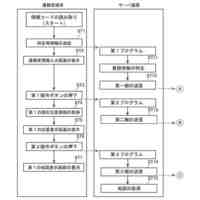
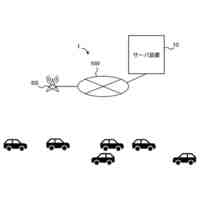
記録した前記路上構造物に関する情報を前記車両外部のサーバへ送信し、前記サーバから、前記自車位置において前記車両または他車両により過去に計測された路上構造物に関する情報を受信し、
前記受信した路上構造物に関する情報に基づいて、路上構造物の位置および大きさを求める、環境認識装置。
【請求項10】
車両の車外を撮像する複数の撮像装置により取得された複数の画像から得られる視差情報に基づいて、前記画像に撮像された路面に存在する路上構造物の候補を示す第1の路上構造物候補を検知し、
前記視差情報及び前記画像の濃淡情報に基づいて、前記画像に撮像された路面に存在する路上構造物の候補を示す第2の路上構造物候補を検知し、
前記第1の路上構造物候補および前記第2の路上構造物候補に関する検知結果に基づいて、路上構造物の位置および大きさを求め、
位置および大きさを求めた前記路上構造物に関する情報を前記車両の車両制御装置に出力する、
環境認識方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、環境認識装置および環境認識方法に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
路面を含む範囲を撮影した画像から路面の凹凸を検出する技術が知られている。特許文献1には、カメラ装置によって撮像された画像に基づいて車両が走行する路面における凹凸を認識し、その結果に基づきサスペンションの振動吸収特性を制御する伝達量制御装置が記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2019-55757号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載されている伝達量制御装置には、例えば気象条件・照明条件・路面標示などに起因して路面状態の検知性能が低下すると適切な制御を行えないという問題がある。
【0005】
本発明は、画像による路面状態の検知性能が低下する状況下でも適切な車両制御を行える環境認識装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の一態様による環境認識装置は、車両の車外を撮像する複数の撮像装置により取得された複数の画像に基づいて外界環境を認識する、演算装置を備えた環境認識装置であって、前記演算装置は、複数の前記画像から得られる視差情報に基づいて、前記画像に撮像された路面に存在する路上構造物の候補を示す第一の路上構造物候補を検知し、前記視差情報及び前記画像の濃淡情報に基づいて、前記画像に撮像された路面に存在する路上構造物の候補を示す第二の路上構造物候補を検知し、前記第一の路上構造物候補および前記第二の路上構造物候補に関する検知結果に基づいて、路上構造物の位置および大きさを求め、位置および大きさを求めた前記路上構造物に関する情報を前記車両の車両制御装置に出力する。
また、本発明の一態様による環境認識方法は、車両の車外を撮像する複数の撮像装置により取得された複数の画像から得られる視差情報に基づいて、前記画像に撮像された路面に存在する路上構造物の候補を示す第1の路上構造物候補を検知し、前記視差情報及び前記画像の濃淡情報に基づいて、前記画像に撮像された路面に存在する路上構造物の候補を示す第2の路上構造物候補を検知し、前記第1の路上構造物候補および前記第2の路上構造物候補に関する検知結果に基づいて、路上構造物の位置および大きさを求め、位置および大きさを求めた前記路上構造物に関する情報を前記車両の車両制御装置に出力する。
【発明の効果】
【0007】
本発明によれば、画像による路面状態の検知性能が低下する状況下であっても、適切な車両制御を行うことができる。
【図面の簡単な説明】
【0008】
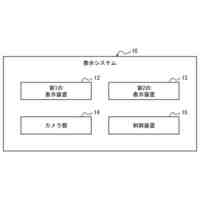
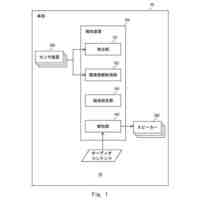
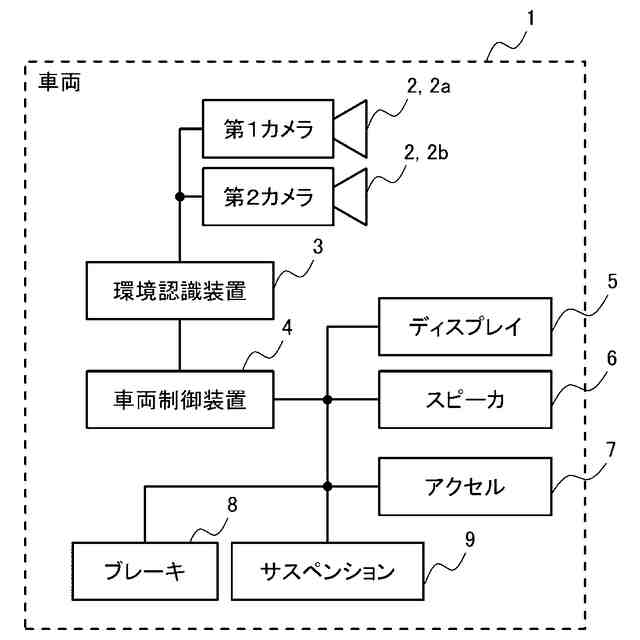
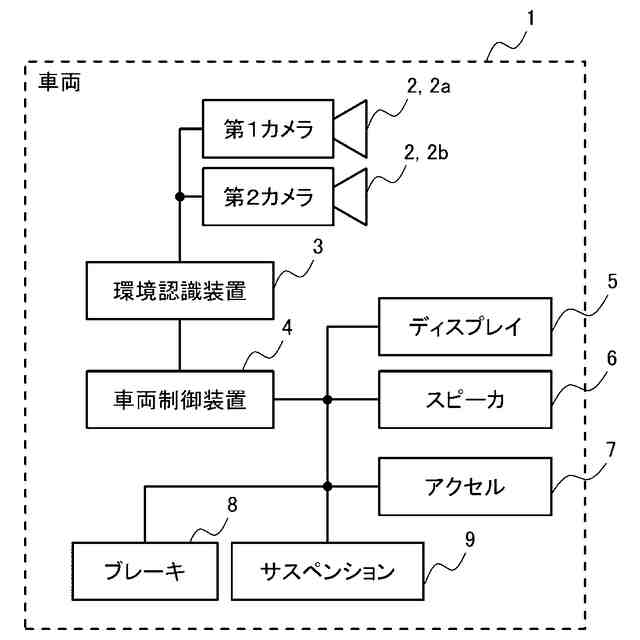
図1は、第1実施形態に係る環境認識装置を搭載した車両の構成を模式的に示すブロック図である。
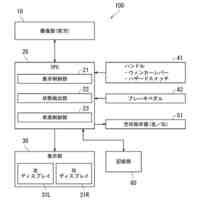
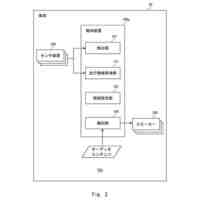
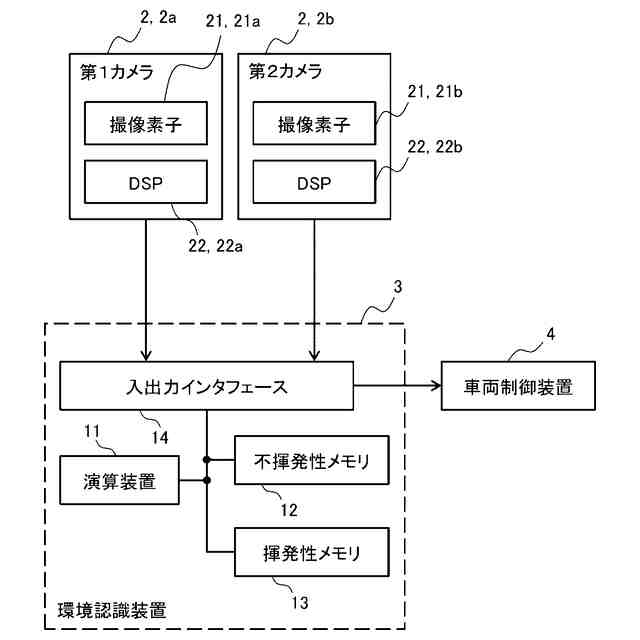
図2は、第1実施形態に係る環境認識装置のハードウェア構成を模式的に示すブロック図である。
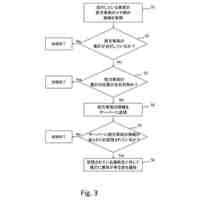
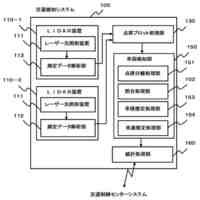
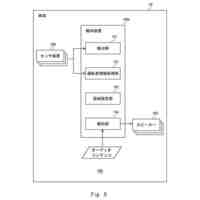
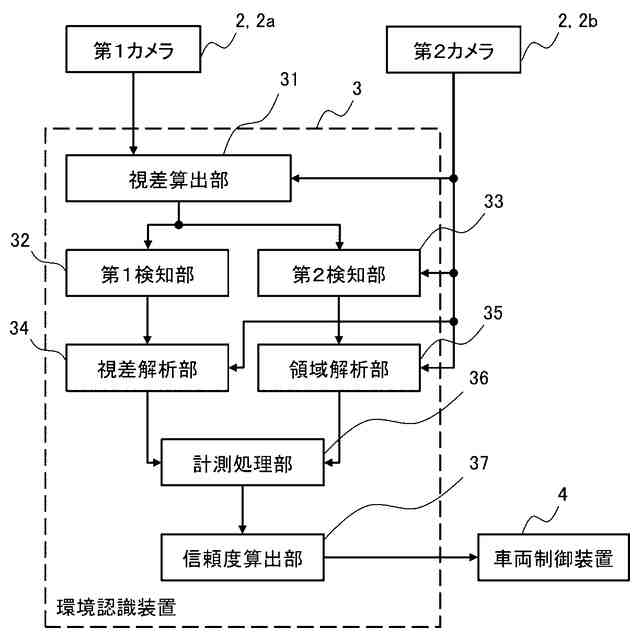
図3は、第1実施形態に係る環境認識装置の機能構成を模式的に示すブロック図である。
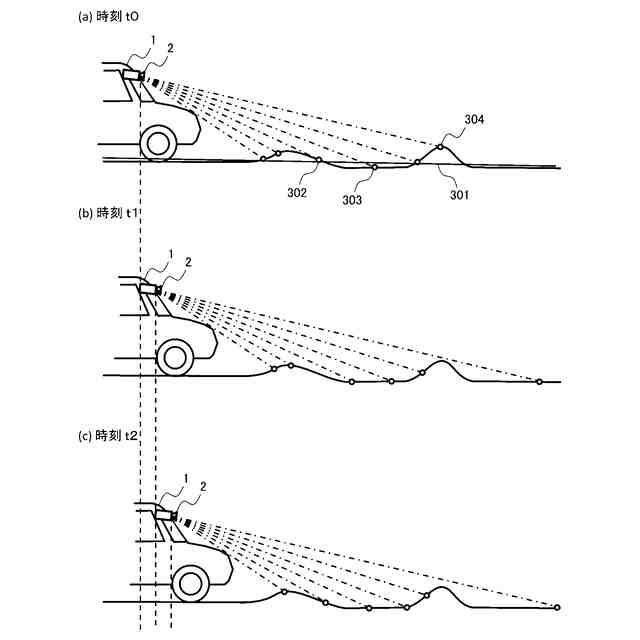
図4は、路面高さを求める方法の概念図である。
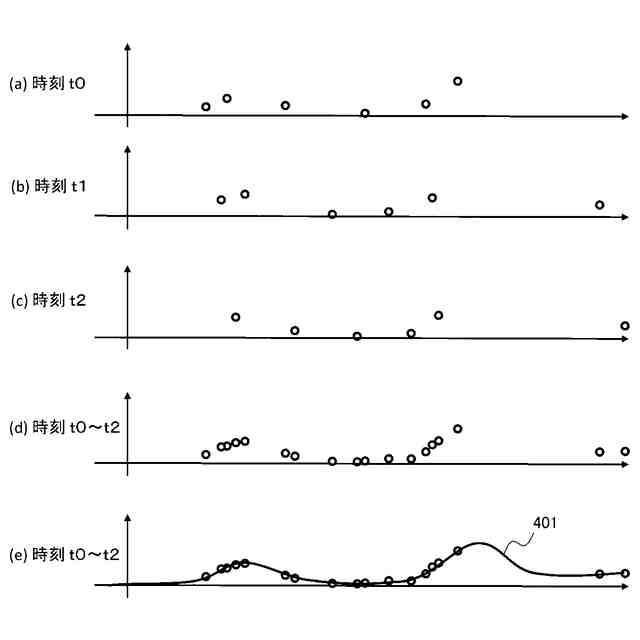
図5は、異なる時刻に決定された距離点を統合する説明図である。
図6は、尤度マップの例を示す模式図である。
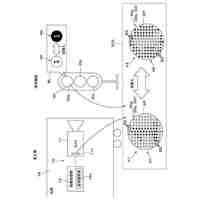
図7は、バンプの検知結果を運転支援や自動運転システムに適用した場合のイメージ図である。
図8は、信頼度ごとの制御内容を例示する図である。
図9は、信頼度を定めるテーブルを例示する図である。
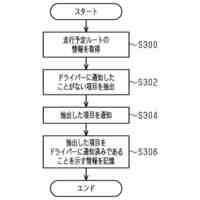
図10は、環境認識装置による環境認識処理のフローチャートである。
図11は、第2実施形態に係る環境認識装置を搭載した車両の構成を模式的に示すブロック図である。
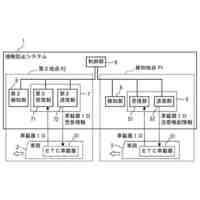
図12は、第2実施形態に係る環境認識装置の機能構成を模式的に示すブロック図である。
【発明を実施するための形態】
【0009】
<第1実施形態>
図1~図10を参照して、本発明の第1実施形態に係る環境認識装置について説明する。
【0010】
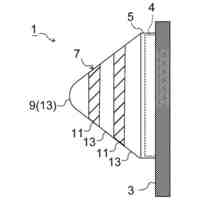
図1は、第1実施形態に係る環境認識装置3を搭載した車両1の構成を模式的に示すブロック図である。車両1は、第1カメラ2a、第2カメラ2b、環境認識装置3、車両制御装置4、ディスプレイ5、スピーカ6、アクセル7、ブレーキ8、およびサスペンション9を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
自動運転車
28日前
ニッタン株式会社
煙感知器
2か月前
個人
迷子支援システム
18日前
株式会社ニカデン
検出装置
4日前
株式会社サンライン
発炎筒携行容器
26日前
ニッタン株式会社
発信機
18日前
株式会社あおい興産
避難誘導灯
12日前
ニッタン株式会社
発信機
18日前
アズビル株式会社
測定システム
2か月前
能美防災株式会社
表示灯カバー
1か月前
日本無線株式会社
人物探索システム
2か月前
京セラ株式会社
案内システム及び案内方法
2か月前
能美防災株式会社
非常放送システム
1か月前
京セラ株式会社
制御装置
18日前
個人
安全に飛び乗りが可能な低速自動運転車
2か月前
株式会社F2Fグループ
疲労度判定方法
2か月前
シャープ株式会社
表示装置
1か月前
トヨタ自動車株式会社
運転支援システム
2か月前
株式会社豊田自動織機
運行表示装置
5日前
京セラ株式会社
表示システム
2か月前
トヨタ自動車株式会社
運転支援装置
2か月前
日本信号株式会社
信号システム及び信号灯器
11日前
戸田建設株式会社
検知システム
26日前
株式会社創発システム研究所
交通検知システム
2か月前
トヨタ自動車株式会社
渋滞検知システム
2か月前
能美防災株式会社
防災設備
2か月前
トヨタ自動車株式会社
ドライブレコーダ
2か月前
株式会社JR西日本テクシア
接触防止システム
11日前
トヨタ自動車株式会社
情報提供システム
1か月前
株式会社ケア・テック
警報システム
2か月前
株式会社京三製作所
交通信号制御システム
4日前
株式会社JVCケンウッド
報知装置及び報知方法
18日前
株式会社JVCケンウッド
報知装置及び報知方法
18日前
株式会社IHI
運転支援装置
1か月前
株式会社JVCケンウッド
報知装置及び報知方法
18日前
株式会社市川工務店
車両用ゲート開閉装置
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ