TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025010580
公報種別
公開特許公報(A)
公開日
2025-01-22
出願番号
2024180971,2023101623
出願日
2024-10-16,2019-06-07
発明の名称
配送多目的サービス実行のためのシステムおよび方法
出願人
デカ・プロダクツ・リミテッド・パートナーシップ
代理人
個人
,
個人
主分類
G08G
1/16 20060101AFI20250115BHJP(信号)
要約
【課題】配送多目的サービス実行のためのシステムおよび方法の提供。
【解決手段】種々の長さの行程を要求するサービスおよび顧客に対する短距離補助を実行することに関連する、多目的サービス。多目的サービスは、種々のタイプのルート上で半自律および自律車両によって送達されることができ、経済的に送達されることができる。多目的車両のネットワークは、多目的サービスを提供し、一般に共有されている配車システムを含むことができる。必要とされるのは、種々の長さの行程に適応することができ、顧客に対する短距離補助の問題を解決することができる、システムである。さらに必要とされるのは、半自律および自律動作に適応することができ、かつ多目的サービスを経済的に送達することができる、システムである。
【選択図】図1
特許請求の範囲
【請求項1】
装置またはシステムまたは方法。
発明の詳細な説明
【技術分野】
【0001】
本教示は、概して、多目的サービスに関する。例えば、本教示は、分散される施設を起点とし、配送施設の近傍に位置する顧客宛の、商品の補助送達に関し得る。必要とされるのは、種々の長さの行程に適応することができ、顧客に対する短距離補助の問題を解決することができる、システムである。さらに必要とされるのは、半自律および自律動作に適応することができ、かつ多目的サービスを経済的に送達することができる、システムである。
続きを表示(約 6,000 文字)
【発明の概要】
【課題を解決するための手段】
【0002】
本教示の多目的システムは、本明細書に述べられた特徴のうちの1つまたはそれらの組み合わせによって、本明細書に述べられた問題および他の問題を解決する。
【0003】
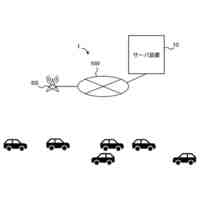
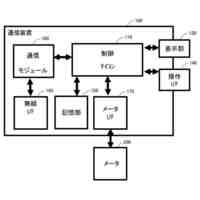
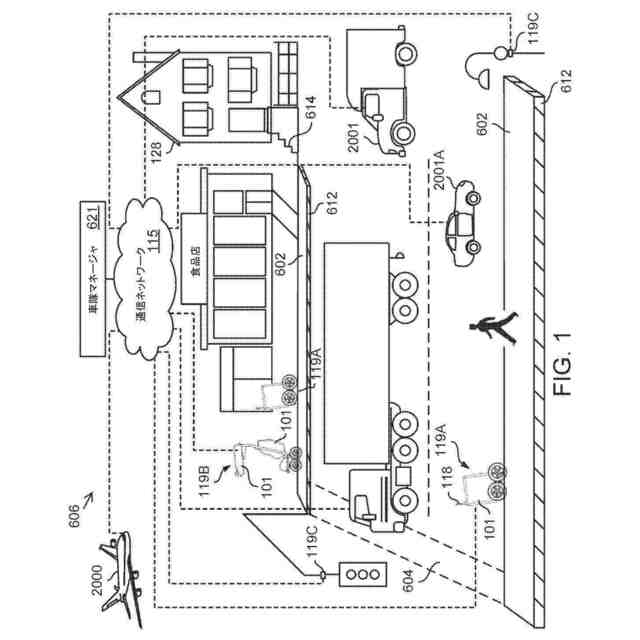
本教示のシステムは、類似システムの車隊ネットワークの一部であることができる。車隊ネットワークはまた、トラック、飛行機、自動運転車両等の車、および事業施設を含むことができる。車隊ネットワークの全ての部材は、シームレスに通信し、例えば、限定ではないが、ナビゲーションデータ、動的物体、代替経路、ならびに多目的特性、顧客場所、および目的地を含む、多目的要件を共有することができる。本教示のシステムは、車隊がシームレスに接続されるように、既存の追跡システムとインターフェースをとることができる。
【0004】
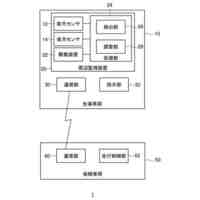
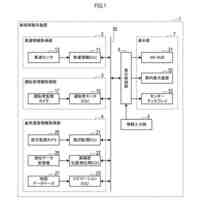
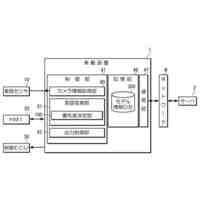
本教示の多目的ロボットは、自律または半自律モードで動作することができる。自律多目的ロボットは、ネットワークと連動して、オペレータの補助を伴わずに、その移動を制御することができる。半自律多目的ロボットは、半自律多目的ロボットのオペレータからの入力を受信および処理し得る、技術を含むことができる。入力は、例えば、限定ではないが、多目的ロボットの自律制御をオーバライドすることができる、または多目的ロボットを制御する際、考慮される、もしくは無視されることができる。多目的ロボットは、多目的ロボットの位置特定のために適切なセンサのセットを含むことができる。例えば、多目的ロボットが、車隊ネットワークの多くの他の部材を含む、環境内に展開されるとき、多目的ロボットは、第1の数のセンサを含むことができる。いくつかの構成では、例えば、車隊ネットワークの比較的に少数の部材を含む、環境内では、多目的ロボットは、第2の数のセンサを含むことができる。センサは、車隊ネットワークの他の部材と関連付けられる、センサと連動して動作することができる。いくつかの構成では、多目的ロボットは、医薬品、食物、食事、および書類等の典型的配送起点からの送達アイテムを収容するために十分な物理的保管空間を含むことができる。多目的ロボットは、他の場所の中でもとりわけ、都市の歩道上ならびに建物の近くおよびその中で動作することができる。多目的ロボットは、例えば、限定ではないが、基点、センサ、外部アプリケーションデータ、オペレータ入力、ビーコン、および多目的ロボットの物理的配向を使用して、多目的ロボットの現在の場所および状況を判定する(位置特定)能力を含むことができる。多目的ロボットは、所望の目的地に到達するためのルートを計画し、ルートに沿って障害物を検出し、多目的ロボットが、ルート、現在の場所、および障害物に基づいて行うための、具体的アクションを動的に判定することができる。障害物は、例えば、限定ではないが、歩行者、車両、動物等の動的(移動性)障害物、ならびに、例えば、限定ではないが、ゴミ箱、歩道、木、建物、およびくぼみ等の静的障害物を含むことができるが、それらを含むことに限定されるわけではない。多目的ロボットは、障害物を視覚的に位置特定し、それらを、例えば、衛星データ等の他のデータに合致させるステップを含む、マップマッチングに適応することができる。多目的ロボットは、好ましいルートおよび回避されるべきルートを判定することができる。いくつかの構成では、多目的ロボットは、縁石を登攀することができる。いくつかの構成では、多目的ロボットは、階段を登攀することができる。多目的ロボットは、階段を登攀する間を含め、4つの車輪上にある間、安定化された動作を達成することができる。多目的ロボットは、例えば、限定ではないが、建物等の障害物から、ルートに沿って変動し得る、事前に選択された距離を維持することができる。本教示の多目的ロボットは、多目的ロボットの着座特徴上に着座する、オペレータによって運転されることができる。いくつかの構成では、多目的ロボットは、車椅子の形態をとることができ、したがって、全ての管轄区内の歩道を法的に横断することができる。多目的ロボットは、障害を持つオペレータを収容することができ、例えば、限定ではないが、ピザおよび医薬品のための搬送容量を含むことができる。いくつかの構成では、多目的ロボットは、道路の規則に準拠し、多目的ロボット、多目的ロボットのオペレータ(存在するとき)、ならびに多目的ロボットによって遭遇される人々および障害物の安全性を維持することができる。規則は、例えば、限定ではないが、障害物に遭遇するときに行うべきことおよび道路を渡るときに行うべきことを含むことができる。例えば、規則は、人物または物への乗り上げおよび非安全な場所への進行に関する禁止事項を含むことができる。規則はまた、非安全場所、例えば、交差点の中央における停止に関する禁止事項を含むことができる。一般に、安全性プロトコルは、本教示の多目的ロボットによって確立および学習されることができる。
【0005】
本教示の多目的ロボットは、多くの目的を果たすことができる。本教示の多目的ロボットは、個人が重い物を、例えば、バス停まで搬送することを補助するために呼び出されることができる。いくつかの構成では、本教示の多目的ロボットは、脅威および異常の発生を見張ることができ、個人をある場所からある場所まで護送するために呼び出されることができる。いくつかの構成では、本教示の多目的ロボットは、モバイルデバイスによって、呼出と多目的ロボットおよびモバイルデバイスの待ち合わせとの間に変化し得る、場所に呼び出されることができる。多目的車両は、アイテムを、1つの場所から別の場所に、例えば、薬局から医薬品を注文した人物の住居に輸送することができる。多目的ロボットは、例えば、ジェスチャによって、歩行者および車両と通信し、認知フィードバックを提供することができる。
【0006】
いくつかの構成では、本教示の多目的ロボットは、1回のバッテリ充電において、16マイル/時で少なくとも15マイル進行することができる。本教示の多目的ロボットは、GPS、道路標識、ステレオカメラ、携帯電話中継器、所望のルートに沿って多目的ロボットに指向し得る操向可能RFビームを伴うスマートビーコン、ビーコン間のIMUデータ、および多目的ロボットが所望のルートを認識および横断することに役立つための他のビーコンデータを使用することができる。いくつかの構成では、本教示の少なくとも1つの自律多目的ロボットは、例えば、電子的に、少なくとも1つの半自律多目的ロボットと結合されることができる。バッテリは、迅速交換/急速充電バッテリを含むことができる。いくつかの構成では、バッテリは、盗難されないように保護されることができる。バッテリは、例えば、ロックがかけられることができる、またはそれらは、バッテリを有効にするために要求される、識別番号を含むことができる。
【0007】
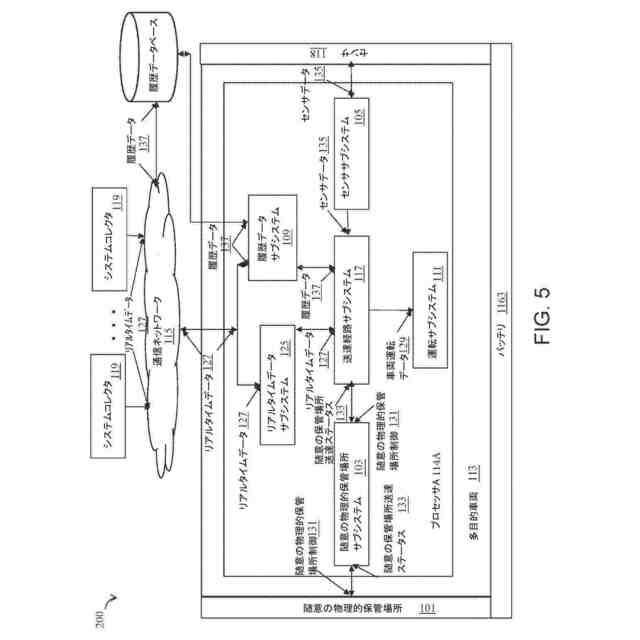
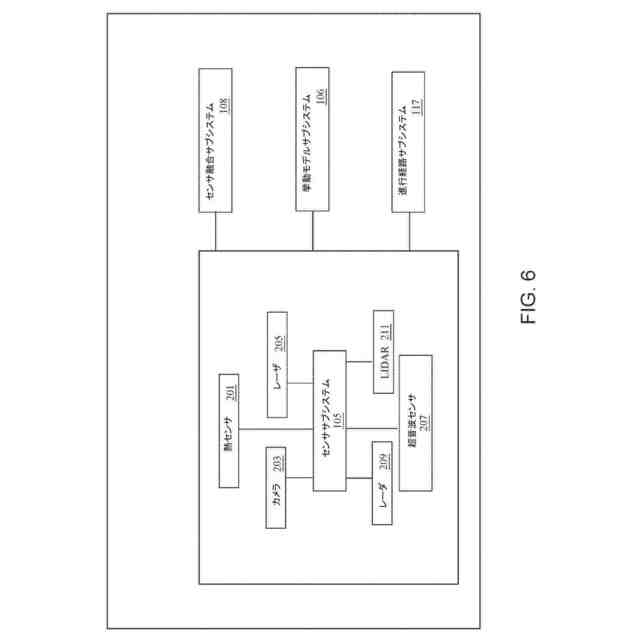
本教示の多目的ロボットは、多目的ロボットの機能のために必要な数およびタイプのセンサを収容することができる。例えば、多目的ロボットは、都市エリアで動作するとき、その進行経路に関連するリアルタイムデータを、例えば、限定ではないが、ビーコンおよび基点等の車隊ネットワークの他の部材から受信することを予期することができる。したがって、多目的ロボットは、都市エリアで動作するとき、その環境のために適切なセンサパッケージを含むことができる。同一多目的ロボットは、より少ない車隊部材を含む、エリアで動作するとき、その環境のために適切であって、かつ可能性として、都市エリアセンサパッケージと異なる、センサパッケージを含むことができる。センサは、本教示の多目的ロボットと統合されることができる。センサは、路上/建物/縁石データにアクセスし、および/またはそれを収集することができ、例えば、限定ではないが、視覚センサ、LIDAR、レーダ、超音波センサ、およびオーディオセンサ、ならびにGPS、Wi-Fi、および電波塔、商業用ビーコン、ならびに塗装された縁石からのデータを含むことができる。視覚センサは、例えば、物体分類およびストップライト分類を可能にし得る、立体視的視覚センサを含むことができる。いくつかの構成では、視覚センサは、縁石を検出することができる。縁石の検出は、反射性材料および色を含み得るが、それらを含むように限定されない、物質で、縁石を塗装することによって、簡略化されることができる。縁石はまた、多目的ロボット等の車隊部材上に搭載される適切なセンサによる検出をトリガし得る、伝導性材料で塗装されることができる。LIDARは、多目的ロボットの環境の点群表現の作成を可能にすることができ、障害物回避、物体分類、およびマッピング/位置特定のために使用されることができる。マップは、環境内の静的物体を含有することができる。位置特定は、静的物体の場所についての情報を提供し、これは、動的物体を認識する際に有用であり得る。オーディオおよび/または超音波センサは、例えば、限定ではないが、車両、歩行者、横断歩道信号、および動物の存在を検出するために使用されることができ、衝突回避および半自律運転を可能にすることができる。超音波センサは、多目的ロボットと最近物体との間の距離の計算を可能にすることができる。いくつかの構成では、多目的ロボットは、多目的ロボット上のセンサの再位置付けに適応することができる。例えば、センサは、多目的ロボット上の保管コンテナの可変設置に適応するように位置付けられることができる。
【0008】
いくつかの構成では、例えば、限定ではないが、トラックおよび自動運転車両等の車両は、本教示の多目的ロボットをその開始場所および目的地の近くまで輸送することができ、多目的ロボットを回収し、それらを、例えば、保管場所、充電、およびサービスエリアに移すことができる。トラックに関して、いくつかの構成では、多目的ロボットが、トラックに進入し得る際、そのバッテリは、多目的ロボットがそのサービスを継続し得るように、除去され、完全に充電されたバッテリと置換されることができる。トラックは、バッテリを入れ替え、それらを充電する能力を含むことができる。いくつかの構成では、空の保管コンパートメントもまた、送達トラック上に詰め込まれることができ、多目的ロボットは、トラックから送り出され、さらなる送達を実施することができる。多目的ロボットおよびトラックは、相互に無線で位置特定することができる。配車機構は、トラックとサービスおよびバッテリとそれらを必要とする多目的ロボットを結び付けることができる。トラックは、少なくとも1つの傾斜路を含み、本教示の多目的ロボットを受け取り、かつ下車させることができる。
【0009】
いくつかの構成では、本教示のトラックおよび多目的ロボットの移動は、サービスコスト、サービス時間、および立ち往生した多目的ロボットの発生のうちの1つまたはそれを上回るものを最小限にするように協調されることができる。サービスコストは、トラックのための燃料、多目的ロボットのためのバッテリコスト、ならびにトラックおよび多目的ロボットの保守/置換コストを含んでもよい。トラックは、多目的ロボットの連続回収および下車に適応し得る、搬入用傾斜路および搬出用傾斜路を含むことができる。トラックは、便宜的場所に駐車されることができ、本教示の多目的ロボットは、トラックと連動してサービスを実施することができる。いくつかの構成では、トラックおよび多目的ロボットは、ある場所で落ち合うように動的にルーティングされることができ、場所は、少なくとも、例えば、限定ではないが、車隊部材がその場所に到達するためにかかるであろう時間量、その場所における駐車の可用性、およびルーティング効率に基づいて、選定されることができる。いくつかの構成では、本教示の多目的ロボットは、それらが、例えば、トラックによって最も必要とされる場所に応じて、ある場所からある場所に移動されることができる。1日のスケジュールが、本教示の多目的ロボットが輸送される場所を制御することができる。例えば、トラックは、多目的ロボットがそのサービスを完了するとき、および/またはそのバッテリが充電される必要があるとき、および/または点検を必要とするとき、本教示の多目的ロボットを迎えに行くことができる。多目的ロボットは、トラックが到着し、それを回収するまで、その最終サービスの場所に自動的に留まることができる。トラックは、本教示の多目的ロボットを、商品およびサービスが購入された店舗等のステーションから、例えば、商品およびサービスが送達されるべき老人ホームに輸送するために使用されることができる。本教示の多目的ロボットは、例えば、老人ホームにおいて降下されることができ、その時点で、多目的ロボットは、商品およびサービスを送達することができる。いくつかの構成では、本教示の多目的ロボットの第1のロボットは、小包をトラックに送達することができ、それらの小包は、多目的ロボットの第1のロボットからトラックに移されることができる。小包は、小包の送達目的地に向かって進む予定である、本教示の多目的ロボットの第2のロボットによって取り上げられることができる。本教示の多目的ロボットは、移動式トラックまたは他の移動式車両から展開されることができる。
【0010】
いくつかの構成では、自動運転車両は、制御機構と、本教示の多目的ロボットを収容し得る、ハードウェアとを装備することができる。自動運転車両は、トラックより都市設定において普遍的であって、それに適合可能であり得る。例えば、本教示の多目的ロボットは、送達されるべき商品を受領し、近隣の自動運転車両を呼び出し、その車両と落ち合うために移動し、その車両に進入し、車両内にドッキングされた状態になることができる。本教示の多目的ロボットのバッテリは、自動運転車両による送達行程の間、充電されることができる。自動運転車両は、車隊の一部として、そこから呼出が生じた、多目的ロボットに関するサービス情報にアクセスすることができ、本教示の多目的ロボットをサービス目的地まで移動させることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
自動運転車
15日前
ニッタン株式会社
煙感知器
1か月前
個人
迷子支援システム
5日前
株式会社サンライン
発炎筒携行容器
13日前
能美防災株式会社
表示灯カバー
1か月前
ニッタン株式会社
発信機
5日前
ニッタン株式会社
発信機
5日前
能美防災株式会社
非常放送システム
1か月前
日本無線株式会社
人物探索システム
1か月前
京セラ株式会社
案内システム及び案内方法
1か月前
京セラ株式会社
制御装置
5日前
トヨタ自動車株式会社
運転支援システム
1か月前
シャープ株式会社
表示装置
27日前
株式会社F2Fグループ
疲労度判定方法
2か月前
トヨタ自動車株式会社
運転支援装置
1か月前
戸田建設株式会社
検知システム
13日前
トヨタ自動車株式会社
ドライブレコーダ
1か月前
株式会社創発システム研究所
交通検知システム
1か月前
トヨタ自動車株式会社
情報提供システム
1か月前
トヨタ自動車株式会社
渋滞検知システム
1か月前
株式会社IHI
運転支援装置
1か月前
株式会社市川工務店
車両用ゲート開閉装置
1か月前
株式会社JVCケンウッド
報知装置及び報知方法
5日前
株式会社JVCケンウッド
報知装置及び報知方法
5日前
株式会社JVCケンウッド
報知装置及び報知方法
5日前
本田技研工業株式会社
制御装置
1か月前
鹿島建設株式会社
火災分析装置およびプログラム
1か月前
トヨタ自動車株式会社
周辺監視装置
1か月前
シャープ株式会社
通信装置および通信方法
13日前
光陽無線株式会社
浸水予測システム及びプログラム
1か月前
株式会社デンソー
車両用表示装置
13日前
シャープ株式会社
駐車場管理システム
1か月前
トヨタ自動車株式会社
方法及びシステム
1か月前
Turing株式会社
情報処理装置およびプログラム
1か月前
能美防災株式会社
防災システム
1か月前
能美防災株式会社
防災機器
1か月前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ