TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025002943
公報種別
公開特許公報(A)
公開日
2025-01-09
出願番号
2023103349
出願日
2023-06-23
発明の名称
制御装置、制御プログラム、及び制御方法
出願人
オムロン株式会社
代理人
弁理士法人秀和特許事務所
主分類
B25J
13/08 20060101AFI20241226BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】対象物の位置関係のばらつきを許容した上で、接触を伴う作業の遂行精度の向上を図る。
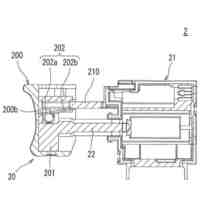
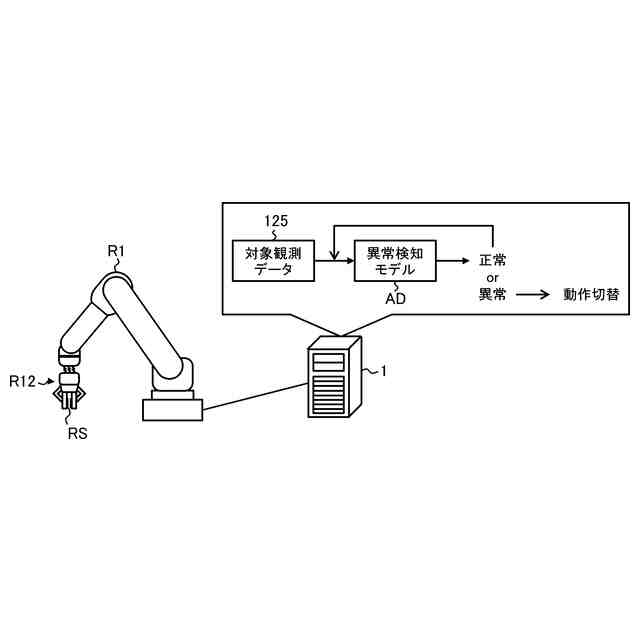
【解決手段】本発明の一側面に係る制御装置は、触覚センサが設けられた手先部を備えるロボット装置のためのものであり、異常検知モデルを保持する。制御装置は、触覚センサから対象観測データを取得するステップ、異常検知モデルを使用して、取得された対象観測データにより示される触覚の傾向が異常か否かに応じて、イベントの発生を検知するステップ、及びイベントの発生の検知に応じて、ロボット装置の動作を切り替えるステップ、を実行するように構成される。
【選択図】図1
特許請求の範囲
【請求項1】
触覚センサが設けられた手先部を備えるロボット装置の制御装置であって、
異常検知モデルを記憶する記憶部、及び
制御部、
を備え、
前記制御部は、
前記触覚センサから対象観測データを取得するステップ、
前記異常検知モデルを使用して、取得された前記対象観測データにより示される触覚の傾向が異常か否かに応じて、前記イベントの発生を検知するステップ、及び
前記イベントの発生の検知に応じて、前記ロボット装置の動作を切り替えるステップ、
を実行するように構成される、
制御装置。
続きを表示(約 2,100 文字)
【請求項2】
前記記憶部は、複数の状況から前記ロボット装置の状況を識別するための識別器を更に記憶し、
前記記憶部は、複数の前記異常検知モデルを記憶し、
前記複数の異常検知モデルそれぞれは、前記複数の状況それぞれに対応して用意され、
前記制御部は、
前記識別器を使用して、前記ロボット装置の現在の状況を識別するステップ、及び
前記現在の状況を識別した結果に応じて、前記複数の異常検知モデルの中から使用する異常検知モデルを選択するステップ、
を更に実行するように構成され、
前記イベントの発生を検知することは、選択された前記異常検知モデルを使用して、取得された前記対象観測データにより示される触覚の傾向が異常か否かに応じて、前記イベントの発生を検知することにより構成される、
請求項1に記載の制御装置。
【請求項3】
前記識別器は、前記触覚センサの観測データから前記状況を識別するように構成され、
前記現在の状況を識別することは、前記識別器を使用して、取得された前記対象観測データから前記現在の状況を識別することにより構成される、
請求項2に記載の制御装置。
【請求項4】
前記ロボット装置の動作を切り替えることは、
前記イベントの発生を検知する前まで、第1タスクを遂行するように、前記ロボット装置の動作を制御するステップ、及び
前記イベントの発生を検知した後、第2タスクを遂行するように、前記ロボット装置の動作を制御するステップ、
により構成される、
請求項1に記載の制御装置。
【請求項5】
前記第1タスク及び前記第2タスクは、前記第1タスクから前記第2タスクに切り替わる間において、前記触覚センサにより観測される触覚の傾向が変わるイベントが生じるように定義される、
請求項4に記載の制御装置。
【請求項6】
前記異常検知モデルは、前記第1タスクを遂行している間に得られる前記触覚センサの観測データより、前記イベントの発生を異常として検知するように構成される、
請求項5に記載の制御装置。
【請求項7】
前記記憶部は、第1制御モデル及び第2制御モデルを更に記憶し、
前記第1制御モデルは、前記第1タスクに応じて与えられ、
前記第2制御モデルは、前記第2タスクに応じて与えられ、
前記第1タスクを遂行するように、前記ロボット装置の動作を制御することは、前記第1制御モデルを使用して、前記ロボット装置の動作を制御することにより構成され、
前記第2タスクを遂行するように、前記ロボット装置の動作を制御することは、前記第2制御モデルを使用して、前記ロボットの動作を制御することにより構成される、
請求項4から6のいずれか1項に記載の制御装置。
【請求項8】
前記記憶部は、複数の状況から前記ロボット装置の状況を識別するための識別器を更に記憶し、
前記第1タスク及び前記第2タスクは前記状況毎に規定され、
前記記憶部は、複数の前記異常検知モデル、複数の前記第1制御モデル及び複数の前記第2制御モデルを記憶し、
前記複数の異常検知モデルそれぞれ、前記複数の第1制御モデルそれぞれ及び前記複数の第2制御モデルそれぞれは、前記複数の状況それぞれに対応して用意され、
前記制御部は、
前記識別器を使用して、前記ロボット装置の現在の状況を識別するステップ、並びに
前記現在の状況を識別した結果に応じて、前記複数の異常検知モデル、前記複数の第1制御モデル及び前記複数の第2制御モデルの中から使用する異常検知モデル、第1制御モデル及び第2制御モデルを選択するステップ、
を更に実行するように構成され、
前記イベントの発生を検知することは、選択された前記異常検知モデルを使用して、取得された前記対象観測データにより示される触覚の傾向が異常か否かに応じて、前記イベントの発生を検知することにより構成され、
前記第1制御モデルを使用することは、選択された前記第1制御モデルを使用することにより構成され、
前記第2制御モデルを使用することは、選択された前記第2制御モデルを使用することにより構成される、
請求項7に記載の制御装置。
【請求項9】
前記識別器は、前記触覚センサの観測データから前記状況を識別するように構成され、
前記現在の状況を識別することは、前記識別器を使用して、取得された前記対象観測データから前記現在の状況を識別することにより構成される、
請求項8に記載の制御装置。
【請求項10】
前記第1制御モデルは、機械学習モデルにより構成される、
請求項7に記載の制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、制御装置、制御プログラム、及び制御方法に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
例えば、部品の配送、組み立て、対象物の操作等の接触を伴う作業を遂行する場面で、ロボット装置が使用される。ロボット装置は、例えば、マニピュレータ等の産業用ロボットである。特許文献1には、接触を伴う高速な動作をロボット装置に実行させるための技術が提案されている。非特許文献1には、柔軟性を有するロボット装置を使用した部品挿入の学習方法が提案されている。柔軟性を有するロボット装置は、安全に接触を伴う動作を実行可能である。そのため、接触を伴う作業を遂行するために、柔軟性を有するロボット装置を使用することは好ましい。
【先行技術文献】
【特許文献】
【0003】
特開2021-142632号公報
【非特許文献】
【0004】
Hamaya, M., Lee, R., Tanaka, K., von Drigalski, F., Nakashima, C., Shibata, Y., & Ijiri, Y. (2020, May), “Learning robotic assembly tasks with lower dimensional systems by leveraging physical softness and environmental constraints”, [online], In 2020 IEEE International Conference on Robotics and Automation (ICRA) (pp. 7747-7753), [令和5年6月21日検索], インターネット<URL:https://www.researchgate.net/publication/341833371_Learning_Robotic_Assembly_Tasks_with_Lower_Dimensional_Systems_by_Leveraging_Physical_Softness_and_Environmental_Constraints>
【発明の概要】
【発明が解決しようとする課題】
【0005】
本件発明者らは、従来の制御方法には、次のような問題点があることを見出した。すなわち、柔軟性の有無に関わらず、タスクを遂行する条件のばらつきは、当該タスクを適切に完遂する精度に悪影響を及ぼす。特に、目標位置(例えば、目標物の配置場所)、エンドエフェクタに保持される部品の姿勢/位置等の位置関係のばらつきは、タスク遂行の精度の低下を招く。
【0006】
一例として、エンドエフェクタ(例えば、グリッパ)にペグを保持させた状態で穴を探索し、探索により発見された穴にペグを挿入する作業をロボット装置に遂行させる場面を想定する。このケースにおいて、保持されるペグの姿勢(位置及び角度)がばらつくことで、ペグと穴との位置関係、作業遂行時にエンドエフェクタに作用する力等の作業条件が変動し得る。これにより、例えば、穴の発見を検知するタイミングが遅れて、ペグが穴の位置を通過してしまい、ペグの穴への挿入が実行不能になる等の不具合が生じる可能性がある。
【0007】
これに対して、専用の治具を用いて、対象物を固定することで、位置関係のばらつきを抑制することができる。しかしながら、この方法では、作業内容、対象物等の作業条件が変更されると、新たな治具を用意する(すなわち、条件毎に治具を用意する)ことになるため、コストがかかってしまう。また、治具を用いたとしても、部品等の作業の対象物に公差は生じ得る。そのため、この方法により、位置関係のばらつきに起因する作業の遂行
精度の低下を抑制することには限界がある。
【0008】
本発明は、一側面では、このような事情を鑑みてなされたものであり、その目的は、対象物の位置関係のばらつきを許容した上で、接触を伴う作業の遂行精度の向上を図るための制御技術を提供することである。
【課題を解決するための手段】
【0009】
本発明は、上述した課題を解決するために、以下の構成を採用する。なお、以下の発明の構成は適宜組み合わせ可能である。
【0010】
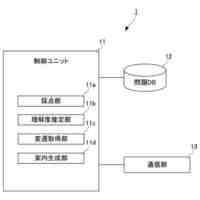
本発明の一側面に係る制御装置は、触覚センサが設けられた手先部を備えるロボット装置の制御装置であり、異常検知モデルを記憶する記憶部及び制御部を備える。前記制御部は、前記触覚センサから対象観測データを取得するステップ、前記異常検知モデルを使用して、取得された前記対象観測データにより示される触覚の傾向が異常か否かに応じて、前記イベントの発生を検知するステップ、及び前記イベントの発生の検知に応じて、前記ロボット装置の動作を切り替えるステップ、を実行するように構成される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
オムロン株式会社
椅子
7日前
オムロン株式会社
ドライバ
13日前
オムロン株式会社
電磁継電器
今日
オムロン株式会社
電磁継電器
今日
オムロン株式会社
電磁継電器
今日
オムロン株式会社
トリガスイッチ
今日
オムロン株式会社
制御システム、設計装置、および設計プログラム
6日前
オムロン株式会社
学習支援装置、学習支援方法、および学習支援プログラム
14日前
オムロン株式会社
制御装置、学習済みモデル生成装置、方法、及びプログラム
今日
オムロン株式会社
環境地図を生成するための方法、システム、及び移動ロボット
今日
オムロン株式会社
予測システム、アグリゲーションシステム、方法およびプログラム
今日
オムロン株式会社
デバイス、プログラム、及びシステム
20日前
株式会社エビス
連結具
2か月前
川崎重工業株式会社
ロボット
2か月前
株式会社マキタ
打撃工具
3か月前
株式会社マキタ
電動工具
7日前
株式会社マキタ
打撃工具
2か月前
株式会社マキタ
電動工具
2か月前
株式会社マキタ
電動ハンマ
3か月前
株式会社エビス
携帯付属物取付具
3か月前
株式会社ダイヘン
制御装置
3か月前
株式会社ダイヘン
搬送装置
3か月前
株式会社マキタ
ハンマドリル
2か月前
川崎重工業株式会社
ロボットリスト
7日前
川崎重工業株式会社
ロボット
3か月前
川崎重工業株式会社
ロボットアーム
7日前
日本車輌製造株式会社
締め付け工具
7日前
川崎重工業株式会社
ロボット
2か月前
SMC株式会社
グリッパ
3か月前
川崎重工業株式会社
ロボット
1か月前
川崎重工業株式会社
ロボットアーム
7日前
学校法人立命館
ロボットハンド
2か月前
CKD株式会社
吸着型搬送装置
21日前
株式会社近藤製作所
産業用ロボットチャック
3か月前
川崎重工業株式会社
ロボットシステム
7日前
川崎重工業株式会社
塗装ロボット
28日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ