TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025020634
公報種別
公開特許公報(A)
公開日
2025-02-13
出願番号
2023124132
出願日
2023-07-31
発明の名称
制御装置、学習済みモデル生成装置、方法、及びプログラム
出願人
オムロン株式会社
代理人
弁理士法人太陽国際特許事務所
主分類
B25J
13/00 20060101AFI20250205BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
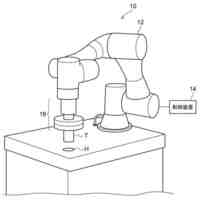
【課題】ロボットが粉体、粒体、又は流体である対象物を秤量する際に、目標量よりも多い対象物をすくい上げてしまった状況下において対象物の量を調整する。
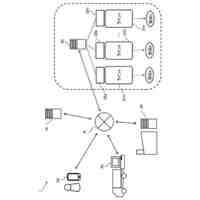
【解決手段】粉体、粒体、又は流体である対象物を秤量するロボットを制御する制御装置であって、制御装置は、ロボットが対象物を秤量する際の状態を表す状態データを取得する。制御装置は、状態データを、予め生成された学習済みモデルであって、かつ状態データが入力されるとロボットがすくい上げた対象物の量を調整する動作を含む行動データが出力される学習済みモデルに対して入力することにより、行動データを生成する。制御装置は、行動データが表す動作が実現されるように、ロボットを制御する。
【選択図】図5
特許請求の範囲
【請求項1】
粉体、粒体、又は流体である対象物を秤量するロボットを制御する制御装置であって、
前記ロボットが前記対象物を秤量する際の状態を表す状態データを取得する取得部と、
前記取得部により取得された前記状態データを、予め生成された学習済みモデルであって、かつ前記状態データが入力されると前記ロボットがすくい上げた前記対象物の量を調整する動作を含む行動データが出力される学習済みモデルに対して入力することにより、前記取得部により取得された前記状態データに応じた前記行動データを生成する生成部と、
前記生成部により生成された前記行動データが表す動作が実現されるように、前記ロボットを制御する制御部と、
を含む制御装置。
続きを表示(約 1,600 文字)
【請求項2】
前記学習済みモデルは、
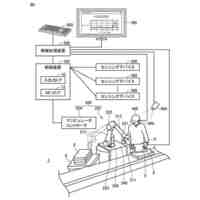
仮想ロボットが仮想の粉体、粒体、又は流体である仮想対象物を秤量する際の動作をコンピュータシミュレーションすることにより得られたデータに基づき学習されたモデルである、
請求項1に記載の制御装置。
【請求項3】
前記コンピュータシミュレーションは、仮想空間内の物理パラメータをランダムに変化させることにより実行されたシミュレーションである、
請求項2に記載の制御装置。
【請求項4】
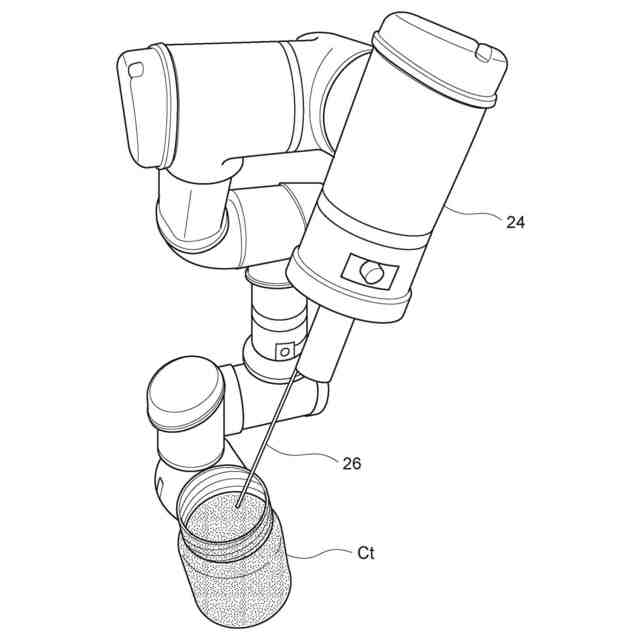
前記ロボットにはスプーンが設置されており、
前記状態データは、前記スプーンの姿勢と前記対象物の目標量とを含むデータである、
請求項1~請求項3の何れか1項に記載の制御装置。
【請求項5】
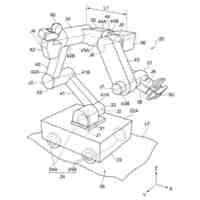
前記対象物の量を調整する動作は、前記ロボットがすくい上げた前記対象物を落とす動作である、
請求項1~請求項3の何れか1項に記載の制御装置。
【請求項6】
前記対象物を落とす動作は、前記ロボットの特定箇所の姿勢及び前記ロボットの特定箇所の位置を変化させる動作である、
請求項5に記載の制御装置。
【請求項7】
仮想ロボットが仮想の粉体、粒体、又は流体である仮想対象物を秤量する際の動作をコンピュータシミュレーションすることにより得られる学習用データを取得する学習用取得部と、
前記学習用取得部により取得された学習用データに基づいて、ロボットが粉体、粒体、又は流体である対象物を秤量する際の状態を表す状態データが入力されると前記ロボットがすくい上げた前記対象物の量を調整する動作を含む行動データが出力される学習済みモデルを生成する学習部と、
を含む学習済みモデル生成装置。
【請求項8】
粉体、粒体、又は流体である対象物を秤量するロボットを制御する制御方法であって、
前記ロボットが前記対象物を秤量する際の状態を表す状態データを取得し、
取得された前記状態データを、予め生成された学習済みモデルであって、かつ前記状態データが入力されると前記ロボットがすくい上げた前記対象物の量を調整する動作を含む行動データが出力される学習済みモデルに対して入力することにより、取得された前記状態データに応じた前記行動データを生成し、
生成された前記行動データが表す動作が実現されるように、前記ロボットを制御する、
処理をコンピュータが実行する制御方法。
【請求項9】
仮想ロボットが仮想の粉体、粒体、又は流体である仮想対象物を秤量する際の動作をコンピュータシミュレーションすることにより得られる学習用データを取得し、
取得された学習用データに基づいて、ロボットが粉体、粒体、又は流体である対象物を秤量する際の状態を表す状態データが入力されると前記ロボットがすくい上げた前記対象物の量を調整する動作を含む行動データが出力される学習済みモデルを生成する、
処理をコンピュータが実行する学習済みモデル生成方法。
【請求項10】
粉体、粒体、又は流体である対象物を秤量するロボットを制御する制御プログラムであって、
前記ロボットが前記対象物を秤量する際の状態を表す状態データを取得し、
取得された前記状態データを、予め生成された学習済みモデルであって、かつ前記状態データが入力されると前記ロボットがすくい上げた前記対象物の量を調整する動作を含む行動データが出力される学習済みモデルに対して入力することにより、取得された前記状態データに応じた前記行動データを生成し、
生成された前記行動データが表す動作が実現されるように、前記ロボットを制御する、
処理をコンピュータに実行させるための制御プログラム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、制御装置、学習済みモデル生成装置、方法、及びプログラムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
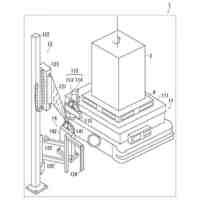
従来、塩等の粉体を秤量する動作を行う学習システムが知られている(例えば、特許文献1を参照)。この学習システムのマニピュレータには、エンドエフェクタとしてスプーンが装着されており、塩を秤量する動作を行う(例えば、段落[0013]を参照)。
【0003】
また、ロボットアームを利用して第1容器から第2容器への注水を行い、液体を秤量する液体秤量方法が知られている(例えば、特許文献2を参照)。この液体秤量方法は、ロボットアームの動作を制御する制御装置が、第1時点に撮影された第1容器を含む画像を取得し、第1時点の第1容器の角度を取得し、第1時点の第2容器の液体量を取得し、取得した画像、角度及び液体量を学習モデルへ入力して、学習モデルが出力する第2時点の角度を取得し、取得した第2時点の角度に応じて、ロボットアームが保持する第1容器の角度を制御する(例えば、請求項1を参照)。
【0004】
また、容器に大容量で入った粉体、粒体又は流体を、別の容器に定められた量だけすくい出して小分けする動作をロボットに学習させる機械学習方法が知られている(例えば、特許文献3)。この機械学習方法は、現実空間において多軸ロボットと対象物とで強化学習させる現実学習プロセスと、シミュレーション空間において、多軸ロボットを疑似的にシミュレートした疑似多軸ロボットと、対象物を疑似的にシミュレートした疑似対象物と、で強化学習させるシミュレーション学習プロセスとからなる(例えば、要約を参照)。
【0005】
また、ロボットを用いて粒状媒体を扱う技術が知られている(例えば、非特許文献1を参照)。非特許文献1には、粒状媒体を掬う際に用いられるロボットの制御モデルが開示されている。
【先行技術文献】
【特許文献】
【0006】
特開2020-194242号公報
特開2021-164980号公報
特開2019-098419号公報
【非特許文献】
【0007】
Schenckc, C., Tompson, J., Fox, D., and Levine, S., "Learning Robotic Manipulation of Granular Media," In Proceedings of the First Conference on Robotic Learning (CoRL) (to appear), 2017
【発明の概要】
【発明が解決しようとする課題】
【0008】
ところで、ロボットが粉体、粒体、又は流体等の対象物を秤量する際に、ロボットは目標量よりも多い対象物をすくい上げてしまう場合もあり得る。通常ロボットは目標量通りを狙って動作するが様々な誤差により実現は難しく、目標量よりも多い対象物をすくい上げてしまう場合もあり得る。上記特許文献1-3に開示されている技術及び上記非特許文献1に開示されている技術は、粉体等を秤量する技術であるものの、目標量よりも多い対象物をすくい上げてしまった場合にロボットにどのような動作をさせるのかについては考慮されていない。
【0009】
本開示は、上記の点に鑑みてなされたものであり、ロボットが粉体、粒体、又は流体である対象物を秤量する際に、目標量よりも多い対象物をすくい上げてしまった状況下において、対象物の量を調整することを目的とする。
【課題を解決するための手段】
【0010】
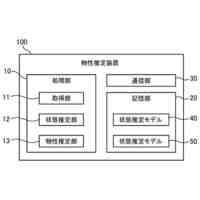
上記目的を達成するために、本開示の制御装置は、粉体、粒体、又は流体である対象物を秤量するロボットを制御する制御装置であって、前記ロボットが前記対象物を秤量する際の状態を表す状態データを取得する取得部と、前記取得部により取得された前記状態データを、予め生成された学習済みモデルであって、かつ前記状態データが入力されると前記ロボットがすくい上げた前記対象物の量を調整する動作を含む行動データが出力される学習済みモデルに対して入力することにより、前記取得部により取得された前記状態データに応じた前記行動データを生成する生成部と、前記生成部により生成された前記行動データが表す動作が実現されるように、前記ロボットを制御する制御部と、を含む制御装置である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
オムロン株式会社
電磁継電器
9日前
オムロン株式会社
光電センサ
1か月前
オムロン株式会社
電磁継電器
9日前
オムロン株式会社
スレーブ装置
12日前
オムロン株式会社
トリガスイッチ
8日前
オムロン株式会社
光干渉測距センサ
23日前
オムロン株式会社
モバイルロボット
1か月前
オムロン株式会社
モバイルロボット
1か月前
オムロン株式会社
スイッチング素子
1か月前
オムロン株式会社
回転装置及びマウス
12日前
オムロン株式会社
情報取得装置、及び自動改札機
12日前
オムロン株式会社
制御装置、方法、及びプログラム
25日前
オムロン株式会社
情報処理システム、情報処理方法
1か月前
オムロン株式会社
モデル生成方法及び推論プログラム
1か月前
オムロン株式会社
多関節ロボット、及びモバイルロボット
1か月前
オムロン株式会社
協調作業システム、方法およびプログラム
12日前
オムロン株式会社
学習装置、操作情報変換装置及び学習方法
12日前
オムロン株式会社
信号制御システム、およびステップアップ方法
16日前
オムロン株式会社
状態推定装置、状態推定方法及び状態推定プログラム
1か月前
オムロン株式会社
加熱炉、制御装置、制御プログラム、および制御方法
1か月前
オムロン株式会社
バーコードリーダーにおける画像処理パラメータの決定
1か月前
オムロン株式会社
物品包装システム、自律走行ロボット、及びプログラム
1か月前
オムロン株式会社
パワーコンディショナ
29日前
オムロン株式会社
スイッチ、スイッチアッセンブリ、操作装置および操作用装置
1か月前
OMC株式会社
ロボット
23日前
株式会社クレスコ
補助吸着具
16日前
株式会社不二越
ロボット
8日前
株式会社エビス
腰ベルト用連結具
23日前
個人
深孔スリーブ駆動ロッド構造
1か月前
個人
バール
1か月前
工機ホールディングス株式会社
作業機
1か月前
住友重機械工業株式会社
ロボット
2日前
株式会社イノウ
給油口キャップ用開閉具
9日前
梅馨堂合同会社
人協働ロボットシステム
1か月前
川崎重工業株式会社
制動システム
8日前
株式会社不二越
垂直多関節ロボット
9日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ