TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025060083
公報種別
公開特許公報(A)
公開日
2025-04-10
出願番号
2023170594
出願日
2023-09-29
発明の名称
状態推定装置、状態推定方法及び状態推定プログラム
出願人
オムロン株式会社
,
国立大学法人大阪大学
代理人
弁理士法人酒井国際特許事務所
主分類
G06N
3/08 20230101AFI20250403BHJP(計算;計数)
要約
【課題】単位構成物間の近距離及び遠距離の両方における相互作用を適切に反映させる。
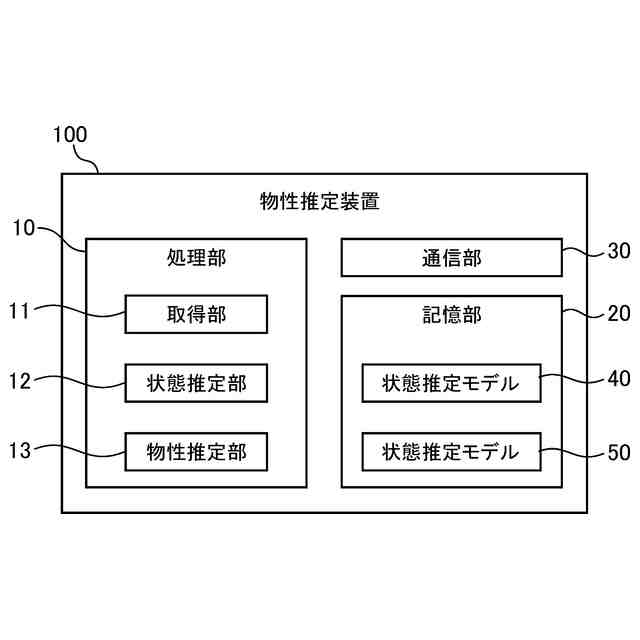
【解決手段】状態推定装置は、1種類以上の点が空間内に無限に広がる点群構造の有限な一部である点群部分のそれぞれの点の種類及び位置を入力として、点群部分のそれぞれの点の状態を推定する状態推定装置であって、入力される点の種類及び位置を入力情報として取得する取得部と、点群部分における点の種類及び位置と、点群部分のそれぞれの点の状態を表す特徴ベクトルとの対応関係を機械学習した学習モデルである状態推定モデルにより、入力情報に対応する特徴ベクトルを推定する状態推定部とを備える。
【選択図】図2
特許請求の範囲
【請求項1】
1種類以上の点が空間内に無限に広がる点群構造の有限な一部である点群部分のそれぞれの前記点の種類及び位置を入力として、前記点群部分のそれぞれの前記点の状態を推定する状態推定装置であって、
入力される前記点の種類及び位置を入力情報として取得する取得部と、
前記点群部分における前記点の種類及び位置と、前記点群部分のそれぞれの前記点の状態を表す特徴ベクトルとの対応関係を機械学習した学習モデルである状態推定モデルにより、前記入力情報に対応する前記特徴ベクトルを推定する状態推定部と
を備え、
前記状態推定モデルは、
前記点群部分の前記点のそれぞれの状態を前記点群構造内の他の前記点との距離に応じて減衰する相互作用関数の無限級数和を含むように定めた関数により、実空間、前記実空間をフーリエ変換して得られる逆空間、又は、前記実空間及び前記逆空間の両方で、前記点群部分の前記点のそれぞれについて前記点群構造内の他の前記点との間の相互作用を計算して得られる計算結果に基づいた前記特徴ベクトルを推定するように機械学習したものである
状態推定装置。
続きを表示(約 5,500 文字)
【請求項2】
前記点の種類をX
0
={x
1
0
,x
2
0
,x
3
0
,…}とし、
前記点の位置をP={p
1
,p
2
,p
3
,…}とし、
前記点の種類X
0
及び前記点の位置Pに基づく前記入力情報をX={x
1
,x
2
,x
3
,…}とし、
前記点群構造において前記点群部分の目標点となる前記点iについて前記点群構造の他の前記点jとの距離に応じて減衰する前記相互作用関数をf
ij
とし、
前記点iの状態を示す前記特徴ベクトルをy
i
とすると、
前記特徴ベクトルy
i
は、総相互作用係数Z
i
と総相互作用ベクトルa
i
とを受けてベクトルを返す関数g
i
を用いて、
TIFF
2025060083000038.tif
7
170
と示され、
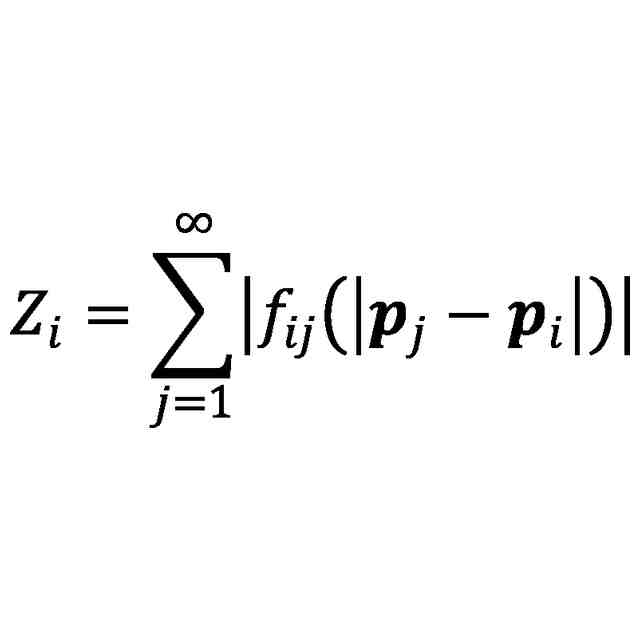
前記総相互作用係数Z
i
は、
TIFF
2025060083000039.tif
19
170
で表され、
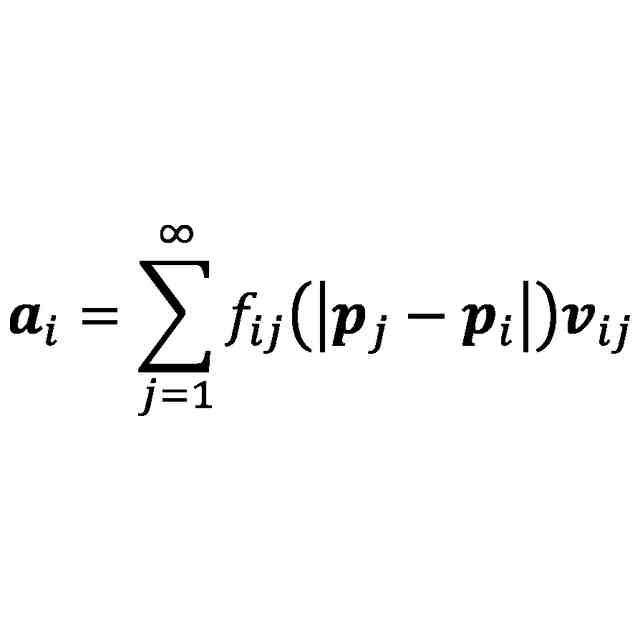
前記総相互作用ベクトルa
i
は、
TIFF
2025060083000040.tif
19
170
で表され、
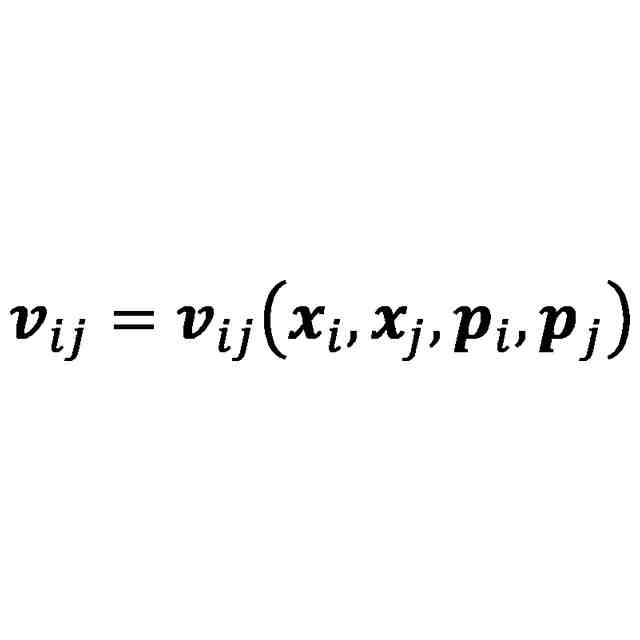
前記点jから前記点iへの相互作用ベクトルv
ij
は、
TIFF
2025060083000041.tif
9
170
で表され、
前記相互作用関数f
ij
は、
TIFF
2025060083000042.tif
12
170
である
請求項1に記載の状態推定装置。
【請求項3】
前記点群構造が周期性を有する場合、前記点の種類X
0
及び前記点の位置Pは、N個の有限な基本繰り返し要素S
cell
と、D次元空間におけるD個の並進方向ベクトルL={l
1
,…,l
D
}と、D次元の整数ベクトルnと、D次元並進Lnで移動させた位置の点であるi(n)とを用いて、
TIFF
2025060083000043.tif
9
170
TIFF
2025060083000044.tif
9
170
で示され、
前記点群部分を前記基本繰り返し要素S
cell
とした場合、目標原子となる前記点iの前記特徴ベクトルy
i
において、Z
i
及びa
i
は、
TIFF
2025060083000045.tif
17
170
TIFF
2025060083000046.tif
16
170
で表される
請求項2に記載の状態推定装置。
【請求項4】
前記実空間における前記総相互作用係数Z
i
及び前記総相互作用ベクトルa
i
は、
前記D次元空間の座標変数r=(x
1
、…、x
d
)、を用いて、
TIFF
2025060083000047.tif
17
170
TIFF
2025060083000048.tif
17
170
で表され、
前記周期性を考慮した相互作用関数であるf´
ij
、f´´
ij
は、
TIFF
2025060083000049.tif
16
170
TIFF
2025060083000050.tif
16
170
で表され、
前記逆空間における前記総相互作用係数Z
i
及び前記総相互作用ベクトルa
i
は、空間角周波数ω
m
によるフーリエ級数展開を用いて、
TIFF
2025060083000051.tif
16
170
TIFF
2025060083000052.tif
16
170
で表され、
前記空間角周波数ω
m
は、
TIFF
2025060083000053.tif
8
170
で表され、
前記周期性を考慮した相互作用関数f´
ij
、f´´
ij
のフーリエ係数であるF´
ij
、F´´
ij
は、
TIFF
2025060083000054.tif
14
170
TIFF
2025060083000055.tif
15
170
で表される
請求項3に記載の状態推定装置。
【請求項5】
前記実空間において、前記特徴ベクトルy
i
は、
TIFF
2025060083000056.tif
7
170
で表され、
前記相互作用関数f
ij
(r)は、クエリベクトルq
i
、キーベクトルk
i
及びバリューベクトルv
i
、さらに減衰範囲を決定する半径σ
i
とを用いて、
TIFF
2025060083000057.tif
17
170
で表され、
σ
i
は、定数、あるいは、減衰範囲のスケールを決定する半径r
0
と、正の値を返す関数ρと、学習パラメータw(スカラー)、w(太字、ベクトル)とを用いて、
TIFF
2025060083000058.tif
10
170
あるいは、
TIFF
2025060083000059.tif
10
170
と定義し、
距離変数rは、
TIFF
2025060083000060.tif
9
170
で表され、
前記クエリベクトルq
i
、キーベクトルk
i
及びバリューベクトルv
i
は、前記状態推定モデルの学習パラメータW
Q
、W
K
、W
V
を用いて、
TIFF
2025060083000061.tif
8
170
で表され、
前記相互作用ベクトルv
ij
は、定数W
G
と、2つの前記点の間の距離を示すK次元のワンホットベクトルbとを用いて、
TIFF
2025060083000062.tif
9
170
で表され、
前記ワンホットベクトルbは、当該ワンホットベクトルbが表現可能な最大距離r
max
を用いて、
TIFF
2025060083000063.tif
18
170
で表され、
定数μ
k
は、
TIFF
2025060083000064.tif
12
170
で表される
請求項3に記載の状態推定装置。
【請求項6】
前記逆空間において、前記特徴ベクトルy
i
は、
TIFF
2025060083000065.tif
7
170
で表され、
前記周期性を考慮した相互作用関数f´
ij
(r)のフーリエ係数であるF´
ij
(ω
m
)は、クエリベクトルq
i
、キーベクトルk
i
及びバリューベクトルv
i
と、減衰範囲を決定する半径σ
i
バー(「σ
i
」の上に「-」)とを用いて、
TIFF
2025060083000066.tif
17
170
TIFF
2025060083000067.tif
19
170
で表され、
σ
i
バーは、定数、あるいは、減衰範囲のスケールを決定する半径r
0
バー(「r
0
」の上に「-」)と、正の値を返す関数ρと、学習パラメータwバー(「w」の上に「-」、スカラー)、wバー(太字の「w」の上に「-」、ベクトル)とを用いて、
TIFF
2025060083000068.tif
10
170
あるいは、
TIFF
2025060083000069.tif
10
170
と定義し、
前記周期性を考慮した相互作用関数f´´
ij
(r)のフーリエ係数であるF´´
ij
(ω
m
)は、
TIFF
2025060083000070.tif
10
170
で表され、
前記クエリベクトルq
i
、前記キーベクトルk
i
及び前記バリューベクトルv
i
は、前記状態推定モデルの学習パラメータW
Q
、W
K
、W
V
を用いて、
TIFF
2025060083000071.tif
8
170
で表される
請求項5に記載の状態推定装置。
【請求項7】
前記状態推定モデルは、前記学習パラメータW
Q
、W
K
、W
V
が異なるH通りのクエリベクトルq
i
、キーベクトルk
i
及びバリューベクトルv
i
を並列に用いて前記相互作用を計算し、計算結果を結合して前記特徴ベクトル
y
i
=(y
i
1
、y
i
2
、…、y
i
H
)
を算出する
請求項6に記載の状態推定装置。
【請求項8】
前記状態推定部は、前記状態推定モデルにより推定された前記特徴ベクトルを他のニューラルネットワークNNに入力して、出力値X´として、
X´=NN(y
1
、y
2
、…、y
N
)
を算出する
請求項7に記載の状態推定装置。
【請求項9】
前記状態推定部は、前記ニューラルネットワークNNの出力値であるX´を前記入力情報として、前記関数g
i
により前記特徴ベクトルy
i
を算出する
請求項8に記載の状態推定装置。
【請求項10】
1種類以上の点が空間内に無限に広がる点群構造の有限な一部である点群部分のそれぞれの前記点の種類及び位置を入力として、前記点群部分のそれぞれの前記点の状態を推定する状態推定方法であって、
入力される前記点の種類及び位置を入力情報として取得する取得ステップと、
前記点群部分における前記点の種類及び位置と、前記点群部分のそれぞれの前記点の状態を表す特徴ベクトルとの対応関係を機械学習した学習モデルである状態推定モデルにより、前記入力情報に対応する前記特徴ベクトルを推定する状態推定ステップと
を含み、
前記状態推定モデルは、
前記点群部分の前記点のそれぞれの状態を前記点群構造内の他の前記点との距離に応じて減衰する相互作用関数の無限級数和を含むように定めた関数により、実空間、前記実空間をフーリエ変換して得られる逆空間、又は、前記実空間及び前記逆空間の両方で、前記点群部分の前記点のそれぞれについて前記点群構造内の他の前記点との間の相互作用を計算して得られる計算結果に基づいた前記特徴ベクトルを推定するように機械学習したものである
状態推定方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、状態推定装置、状態推定方法及び状態推定プログラムに関する。
続きを表示(約 3,600 文字)
【背景技術】
【0002】
永久磁石、超電導体、バッテリー等の各種材料を構成する物質は、結晶構造と呼ばれる3次元空間における原子配置パターンで表される。このような物質の形成エネルギー、バンドギャップ等の物性値は、結晶構造に基づいてシミュレーションにより算出することができる。一方、結晶構造に基づくシミュレーションは、多大な計算時間を要するため、機械学習モデルにより高速に物性値を予測する手法が研究されている。
【0003】
例えば、非特許文献1には、グラフニューラルネットワーク(GNN)を用いた機械学習モデルにより、実空間における結晶構造中の近距離にある原子間の相互作用を繰り返し計算して原子状態を特徴ベクトルとして算出し、算出した特徴ベクトルに基づいて物性値等の予測を行う手法が記載されている。
【先行技術文献】
【非特許文献】
【0004】
Tian Xie and Jeffrey C. Grossman, "Crystal Graph Convolutional Neural Networks for an Accurate and Interpretable Prediction of Material Properties ", Phys. Rev. Lett. 120, 145301 Published 6 April 2018.
Keqiang Yan, Yi Liu, Yuchao Lin, and Shuiwang Ji. Periodic graph transformers for crystal material property prediction. In S. Koyejo, S. Mohamed, A. Agarwal, D. Belgrave, K. Cho, and A. Oh (eds.), Advances in Neural Information Processing Systems, volume 35, pp. 15066-15080. Curran Associates, Inc., 2022.
Arthur Kosmala, Johannes Gasteiger, Nicholas Gao, Stephan Gunnemann(uはウムラウトが付く), “Ewald-based Long-Range Message Passing for Molecular Graphs”, arXiv:2303.04791, 2023.
Chengxuan Ying, Tianle Cai, Shengjie Luo, Shuxin Zheng, Guolin Ke, Di He, Yanming Shen, and Tie-Yan Liu. Do transformers really perform badly for graph representation? In Advances in Neural Information Processing Systems, volume 34, pp. 28877-28888. Curran Associates, Inc., 2021.
【発明の概要】
【発明が解決しようとする課題】
【0005】
原子間の相互作用には、例えばクーロン力等のように結晶を構成する単位格子配列の中で比較的遠距離まで及ぼしあう相互作用が存在する。非特許文献1、2に記載の手法では、このような遠距離における相互作用を適切に取り込むことが困難である。非特許文献3ではGNNにフーリエ変換を取り入れることで長距離相互作用を取り込む手法が記載されているが、有限なグラフ構造に基づくGNNで構成されているため、無限に広がる構造が直接的に定式化されていない。また非特許文献4では分子構造中の原子間の相互作用を取り込んでいるが、結晶構造は空間中に無限に広がる構造であるため、この手法を結晶構造に適用することはできない。
【0006】
本発明は、上記に鑑みてなされたものであり、無限に広がる点群構造を構成する各点の近距離及び遠距離の両方における相互作用を適切に反映させることが可能な状態推定装置、状態推定方法及び状態推定プログラムを提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明に係る状態推定装置は、1種類以上の点が空間内に無限に広がる点群構造の有限な一部である点群部分のそれぞれの前記点の種類及び位置を入力として、前記点群部分のそれぞれの前記点の状態を推定する状態推定装置であって、入力される前記点の種類及び位置を入力情報として取得する取得部と、前記点群部分における前記点の種類及び位置と、前記点群部分のそれぞれの前記点の状態を表す特徴ベクトルとの対応関係を機械学習した学習モデルである状態推定モデルにより、前記入力情報に対応する前記特徴ベクトルを推定する状態推定部とを備え、前記状態推定モデルは、前記点群部分の前記点のそれぞれの状態を前記点群構造内の他の前記点との距離に応じて減衰する相互作用関数の無限級数和を含むように定めた関数により、実空間、前記実空間をフーリエ変換して得られる逆空間、又は、前記実空間及び前記逆空間の両方で、前記点群部分の前記点のそれぞれについて前記点群構造内の他の前記点との間の相互作用を計算して得られる計算結果に基づいた前記特徴ベクトルを推定するように機械学習したものである。
【0008】
本発明に係る状態推定方法は、1種類以上の点が空間内に無限に広がる点群構造の有限な一部である点群部分のそれぞれの前記点の種類及び位置を入力として、前記点群部分のそれぞれの前記点の状態を推定する状態推定方法であって、入力される前記点の種類及び位置を入力情報として取得する取得ステップと、前記点群部分における前記点の種類及び位置と、前記点群部分のそれぞれの前記点の状態を表す特徴ベクトルとの対応関係を機械学習した学習モデルである状態推定モデルにより、前記入力情報に対応する前記特徴ベクトルを推定する状態推定ステップとを含み、前記状態推定モデルは、前記点群部分の前記点のそれぞれの状態を前記点群構造内の他の前記点との距離に応じて減衰する相互作用関数の無限級数和を含むように定めた関数により、実空間、前記実空間をフーリエ変換して得られる逆空間、又は、前記実空間及び前記逆空間の両方で、前記点群部分の前記点のそれぞれについて前記点群構造内の他の前記点との間の相互作用を計算して得られる計算結果に基づいた前記特徴ベクトルを推定するように機械学習したものである。
【0009】
本発明に係る状態推定プログラムは、1種類以上の点が空間内に無限に広がる点群構造の有限な一部である点群部分のそれぞれの前記点の種類及び位置を入力として、前記点群部分のそれぞれの前記点の状態を推定する状態推定プログラムであって、入力される前記点の種類及び位置を入力情報として取得する取得処理と、前記点群部分における前記点の種類及び位置と、前記点群部分のそれぞれの前記点の状態を表す特徴ベクトルとの対応関係を機械学習した学習モデルである状態推定モデルにより、前記入力情報に対応する前記特徴ベクトルを推定する状態推定処理とをコンピュータに実行させ、前記状態推定モデルは、前記点群部分の前記点のそれぞれの状態を前記点群構造内の他の前記点との距離に応じて減衰する相互作用関数の無限級数和を含むように定めた関数により、実空間、前記実空間をフーリエ変換して得られる逆空間、又は、前記実空間及び前記逆空間の両方で、前記点群部分の前記点のそれぞれについて前記点群構造内の他の前記点との間の相互作用を計算して得られる計算結果に基づいた前記特徴ベクトルを推定するように機械学習したものである。
【発明の効果】
【0010】
本発明によれば、点群構造を構成する各点の近距離及び遠距離の両方における相互作用を適切に反映させることが可能な状態推定装置、状態推定方法及び状態推定プログラムを提供することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
他の特許を見る

 特許ウォッチ
特許ウォッチ