TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025058623
公報種別
公開特許公報(A)
公開日
2025-04-09
出願番号
2023168664
出願日
2023-09-28
発明の名称
モデル生成方法及び推論プログラム
出願人
オムロン株式会社
代理人
弁理士法人秀和特許事務所
主分類
G06N
20/00 20190101AFI20250402BHJP(計算;計数)
要約
【課題】測地線を生成する際、十分に密なウェイポイントを得るための技術を提供する。
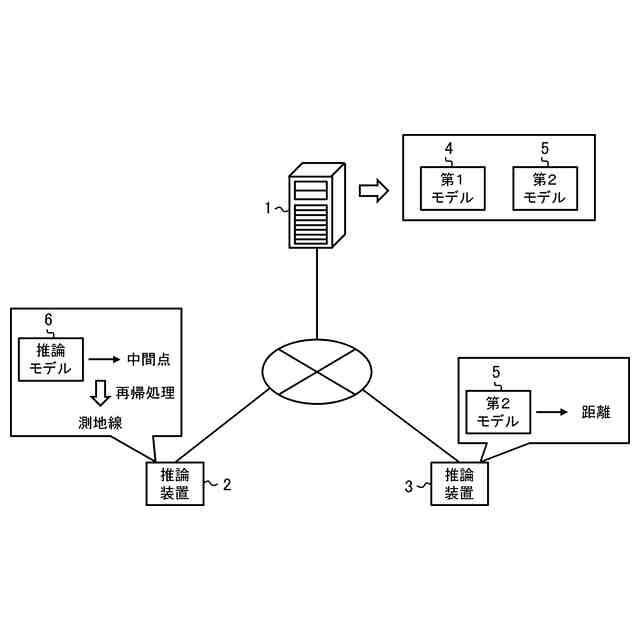
【解決手段】本発明の一側面に係るモデル生成装置は、第1モデル及び第2モデルの機械学習の実行を指揮する。第1モデルは、所与の空間における2つの点の間に存在する中間点の位置を推測するように構成される。第2モデルは、2つの点の間の距離を推測するように構成される。機械学習は、第2モデルによる距離の推測結果を用いて、中間点の位置を推測する能力を獲得するように第1モデルを訓練すること、並びに第1モデルの中間点の推測結果、及び空間のメトリックを用いて、距離を推測する能力を獲得するように第2モデルを訓練することを含む。
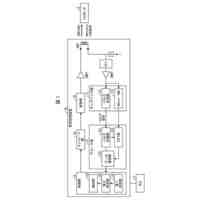
【選択図】図1
特許請求の範囲
【請求項1】
コンピュータが、
第1モデル及び第2モデルの機械学習の実行を指揮するステップと、
前記機械学習の結果を出力するステップと、
を実行し、
前記第1モデルは、所与の空間における2つの点の位置から、当該2つの点の間に存在する中間点の位置を推測するように構成され、
前記第2モデルは、前記2つの点の位置から、前記2つの点の間の距離を推測するように構成され、
前記機械学習は、
前記第2モデルによる前記距離の推測結果を用いて、前記中間点の位置を推測する能力を獲得するように前記第1モデルを訓練すること、並びに
前記第1モデルの前記中間点の推測結果、及び前記空間のメトリックを用いて、前記距離を推測する能力を獲得するように前記第2モデルを訓練すること、
を含む、
モデル生成方法。
続きを表示(約 1,600 文字)
【請求項2】
前記中間点は、中点である、
請求項1に記載のモデル生成方法。
【請求項3】
前記第1モデルを訓練することは、
第1サンプル点及び第2サンプル点で構成される2つの点を前記空間からサンプリングすること、
前記第1モデルを用いて、サンプリングされた前記第1サンプル点及び前記第2サンプル点の間の中間点の第1位置を推測すること、
前記第2モデルを用いて、前記第1サンプル点及び推測された前記中間点の間の第1距離を推測すること、
前記第2モデルを用いて、推測された前記中間点及び前記第2サンプル点の間の第2距離を推測すること、並びに
推測された前記第1距離及び前記第2距離が前記中間点の条件を満たすものとなるように前記第1モデルを訓練すること、
を含む、
請求項1に記載のモデル生成方法。
【請求項4】
前記第2モデルを訓練することは、
(1)第3サンプル点及び第4サンプル点で構成される2つの点を前記空間からサンプリングすること、
(2)前記第2モデルを用いて、サンプリングされた前記第3サンプル点及び前記第4サンプル点の間の第3距離を推測すること、
(3)前記第3サンプル点及び前記第4サンプル点が近接条件を満たす場合、推測された前記第3距離が、前記空間のメトリックにより与えられる値と等しくなるように前記第2モデルを訓練すること、並びに
(4)前記第3サンプル点及び前記第4サンプル点が近接条件を満たさない場合、
(4-1)前記第1モデルを用いて、サンプリングされた前記第3サンプル点及び前記第4サンプル点の間の中間点の第2位置を推測すること、
(4-2)前記第3サンプル点及び前記中間点の組み合わせ、並びに前記中間点及び前記第4サンプル点の組み合わせをそれぞれ、新たな第3サンプル点及び第4サンプル点の組み合わせとして採用して、前記(2)から処理を繰り返すこと、並びに
(4-3)前記(4-2)により前記(2)から処理を繰り返した後、前記第2モ
デルを用いて推測される、(1)でサンプリングされた前記第3サンプル点及び前記第4サンプル点の前記第3距離の推測値が、前記空間のメトリックにより与えられる値の合計と等しくなるように、前記第2モデルを訓練すること、
を含む、
請求項1に記載のモデル生成方法。
【請求項5】
前記空間のメトリックは、コスト関数を含む、
請求項1に記載のモデル生成方法。
【請求項6】
コンピュータに、
推論モデルを使用して、空間上で与えられた第1点及び第2点の間の中間点の位置を推測するステップであって、前記推論モデルは、2つの点の間に存在する中間点であって、当該2つの点からの距離の比が所定である中間点の位置を当該2つの点の位置から推測するように構成されている、ステップと、
前記推測するステップを再帰的に繰り返し実行することで、前記第1点及び前記第2点の間の測地線であって、推測された複数の前記中間点で構成される測地線を生成するステップと、
生成された前記測地線に関する情報を出力するステップと、
を実行させるための、
推論プログラム。
【請求項7】
前記測地線は、経路である、
請求項6に記載の推論プログラム。
【請求項8】
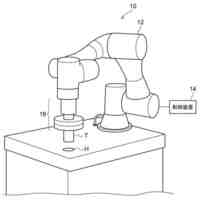
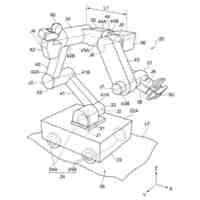
前記経路は、ロボット装置の動作経路である、
請求項7に記載の推論プログラム。
【請求項9】
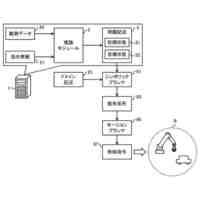
前記経路は、移動体の移動経路である、
請求項7に記載の推論プログラム。
【請求項10】
前記空間内の各点は、装置の状態を示すように構成され、
前記測地線は、前記装置の状態遷移を示す、
請求項6に記載の推論プログラム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、モデル生成方法及び推論プログラムに関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
経路計画、状態の遷移計画、軌跡生成等の問題は、2点間の測地線を生成する問題の一例として捉えることができる。測地線を生成する問題を解く方法の一例として、ゴール条件付きの強化学習により、ウェイポイントを推測するための推論モデルを生成する方法が挙げられる。この方法によれば、生成された推論モデルを使用して、始点から終点まで順次ウェイポイントを推測していくことで、測地線を生成することができる。また、測地線を生成する問題を解く方法の他の一例として、非特許文献1で提案される方法が存在する。非特許文献1で提案される方法によれば、生成された推論モデルを使用して、ウェイポイントとしてサブゴールを繰り返し推測することで、測地線を生成することができる。
【先行技術文献】
【非特許文献】
【0003】
Tom Jurgenson, Edward Groshev, Aviv Tamar, “Sub-Goal Trees -- a Framework for Goal-Directed Trajectory Prediction and Optimization”, [online], [令和5年9月22日検索], インターネット<URL:https://arxiv.org/abs/1906.05329>
【発明の概要】
【発明が解決しようとする課題】
【0004】
本件発明者は、上記従来の方法には、次のような問題点があることを見出した。すなわち、ゴール条件付きの強化学習の方法を採用した場合、ゴールに到達したときのみ報酬を与えるようにすると、報酬が疎となるため、学習が困難である。これを解決する方法として、ゴールに近付く毎に報酬を与える方法を採用することが考えられるが、この方法では、報酬関数の設計が複雑となってしまう。そのため、推論モデルを簡易的に生成することが困難である。一方で、非特許文献1の方法によれば、推論モデルを簡易的に生成することが可能である。しかしながら、非特許文献1の方法では、サブゴールは、2点間の任意の点である。そのため、十分に密なウェイポイントを得られない可能性がある。十分に密なウェイポイントが得られない場合には、様々な支障が生じ得る。例えば、経路計画の場面では、十分に密なウェイポイントが得られないことで、最短経路が得ることが困難になってしまう。
【0005】
本発明は、一側面では、このような事情を鑑みてなされたものであり、その目的は、測地線を生成する際、十分に密なウェイポイントを得るための技術を提供することである。
【課題を解決するための手段】
【0006】
本発明は、上述した課題を解決するために、以下の構成を採用する。なお、以下の発明の構成は適宜組み合わせ可能である。
【0007】
すなわち、本発明の一側面に係るモデル生成方法は、コンピュータが、第1モデル及び第2モデルの機械学習の実行を指揮するステップと、前記機械学習の結果を出力するステップとを実行する情報処理方法である。前記第1モデルは、所与の空間における2つの点の位置から、当該2つの点の間に存在する中間点の位置を推測するように構成される。前記第2モデルは、前記2つの点の位置から、前記2つの点の間の距離を推測するように構成される。前記機械学習は、前記第2モデルによる前記距離の推測結果を用いて、前記中
間点の位置を推測する能力を獲得するように前記第1モデルを訓練すること、並びに前記第1モデルの前記中間点の推測結果、及び前記空間のメトリックを用いて、前記距離を推測する能力を獲得するように前記第2モデルを訓練することを含む。
【0008】
中間点は、2点の間に存在し、2点からの距離の比が所定の条件を満たす(すなわち、2点間の距離を内分する比率が定義された)点であってよい。所定の比率(距離の比)は、変動してもよい。当該構成によれば、所与の空間上で、2点の間に存在する中間点を推測する能力を獲得した訓練済みの第1モデルを生成することができる。生成された訓練済みの第1モデルを使用して、所定の比率に位置する中間点を再帰的に繰り返し推測することで、ウェイポイントを密に得ながら、測地線を生成することができる。したがって、当該構成によれば、測地線を生成する際に、十分に密なウェイポイントを得ることができる。
【0009】
上記一側面に係るモデル生成方法において、前記中間点は、中点であってよい。当該構成によれば、十分に密でかつ均一なウェイポイントを得ることができる。
【0010】
上記一側面に係るモデル生成方法において、前記第1モデルを訓練することは、第1サンプル点及び第2サンプル点で構成される2つの点を前記空間からサンプリングすること、前記第1モデルを用いて、サンプリングされた前記第1サンプル点及び前記第2サンプル点の間の中間点の第1位置を推測すること、前記第2モデルを用いて、前記第1サンプル点及び推測された前記第1位置の間の第1距離を推測すること、前記第2モデルを用いて、推測された前記第1位置及び前記第2サンプル点の間の第2距離を推測すること、並びに推測された前記第1距離及び前記第2距離が前記中間点の条件を満たすものとなるように前記第1モデルを訓練することを含んでよい。当該構成によれば、訓練済みの第1モデルを適切に生成することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
オムロン株式会社
充電装置
6日前
オムロン株式会社
電力開閉器
2日前
オムロン株式会社
電磁継電器
24日前
オムロン株式会社
電磁継電器
24日前
オムロン株式会社
光電センサ
1か月前
オムロン株式会社
スレーブ装置
27日前
オムロン株式会社
トリガスイッチ
1か月前
オムロン株式会社
トリガスイッチ
23日前
オムロン株式会社
光干渉測距センサ
1か月前
オムロン株式会社
スイッチング素子
1か月前
オムロン株式会社
モバイルロボット
1か月前
オムロン株式会社
モバイルロボット
1か月前
オムロン株式会社
回転装置及びマウス
27日前
オムロン株式会社
電力開閉器及び電気機器
2日前
オムロン株式会社
電力変換装置とその制御方法
1か月前
オムロン株式会社
情報取得装置、及び自動改札機
27日前
オムロン株式会社
信号処理装置、及び信号処理方法
1か月前
オムロン株式会社
制御装置、方法、及びプログラム
1か月前
オムロン株式会社
情報処理システム、情報処理方法
1か月前
オムロン株式会社
モデル生成方法及び推論プログラム
1か月前
オムロン株式会社
X線撮影システム及びX線検査装置
13日前
オムロン株式会社
解析装置、解析方法およびプログラム
10日前
オムロン株式会社
表示装置およびこれを備えた展示装置
1か月前
オムロン株式会社
表示装置およびこれを備えた展示装置
1か月前
オムロン株式会社
コントローラ、方法およびプログラム
2日前
オムロン株式会社
多関節ロボット、及びモバイルロボット
1か月前
オムロン株式会社
協調作業システム、方法およびプログラム
27日前
オムロン株式会社
学習装置、操作情報変換装置及び学習方法
27日前
オムロン株式会社
評価装置、評価方法および評価プログラム
9日前
オムロン株式会社
情報処理装置、情報処理方法及びプログラム
13日前
オムロン株式会社
信号制御システム、およびステップアップ方法
1か月前
オムロン株式会社
スイッチユニットおよびこれを備えた展示装置
1か月前
オムロン株式会社
スイッチユニットおよびこれを備えた展示装置
1か月前
オムロン株式会社
画像処理装置、画像処理方法およびプログラム
9日前
オムロン株式会社
蓄電装置、蓄電システム、制御方法及びプログラム
12日前
オムロン株式会社
検査システム、検査装置、検査方法及びプログラム
11日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ