TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025021027
公報種別
公開特許公報(A)
公開日
2025-02-13
出願番号
2023124711
出願日
2023-07-31
発明の名称
環境地図を生成するための方法、システム、及び移動ロボット
出願人
オムロン株式会社
代理人
個人
,
個人
,
個人
主分類
G05D
1/43 20240101AFI20250205BHJP(制御;調整)
要約
【課題】低コスト且つ短時間で広範且つ高精度な環境地図を生成することの可能な環境地図を生成するための方法、システム、及び移動ロボットを提供する。
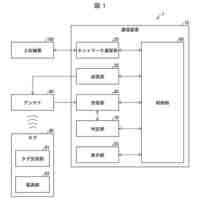
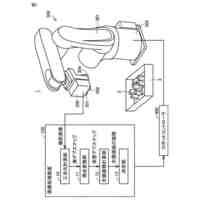
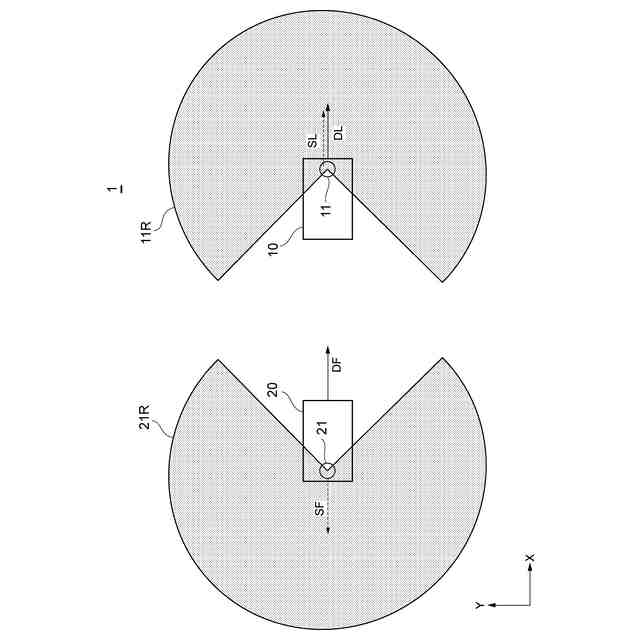
【解決手段】本発明の一態様に係る方法は、環境を検知して第1環境情報を生成するための第1検知手段が設けられた移動可能な第1移動ロボットと、環境を検知して第2環境情報を生成するための第2検知手段が設けられた移動可能な第2移動ロボットと、を制御して環境地図を生成する方法であって、第1移動ロボットが移動するステップと、移動する第1移動ロボットの第1検知手段が環境を検知することにより、第1環境情報を生成するステップと、第2移動ロボットが第1移動ロボットに追従するように移動するステップと、移動する第2移動ロボットの第2検知手段が環境を検知することにより、第2環境情報を生成するステップと、第1環境情報及び第2環境情報に基づいて環境地図を生成するステップと、を含む。
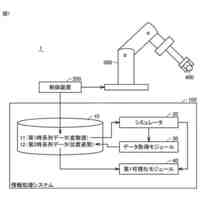
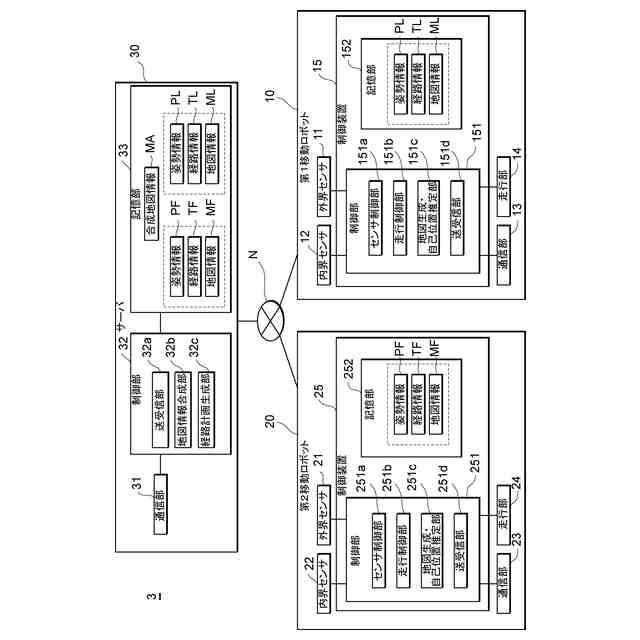
【選択図】図1
特許請求の範囲
【請求項1】
環境を検知して第1環境情報を生成するための第1検知手段が設けられた移動可能な第1移動ロボットと、環境を検知して第2環境情報を生成するための第2検知手段が設けられた移動可能な第2移動ロボットと、を制御して環境地図を生成する方法であって、
前記第1移動ロボットが移動するステップと、
移動する前記第1移動ロボットの前記第1検知手段が環境を検知することにより、第1環境情報を生成するステップと、
前記第2移動ロボットが前記第1移動ロボットに追従するように移動するステップと、
移動する前記第2移動ロボットの前記第2検知手段が環境を検知することにより、第2環境情報を生成するステップと、
前記第1環境情報及び前記第2環境情報に基づいて環境地図を生成するステップと、
を含む方法。
続きを表示(約 1,600 文字)
【請求項2】
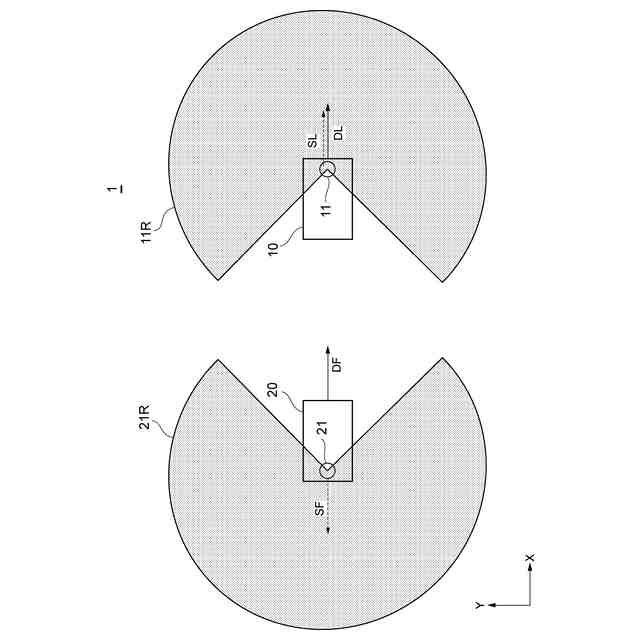
前記第1検知手段は、前記第1検知手段に対する第1範囲の方向にある環境を検知することにより、前記第1環境情報を生成するように構成され、
前記第2検知手段は、前記第2検知手段に対する第2範囲の方向にある環境を検知することにより、前記第2環境情報を生成するように構成される、請求項1に記載の方法。
【請求項3】
前記第2環境情報を生成するステップでは、前記第2範囲は、前記第1範囲に含まれない範囲を含む、請求項2に記載の方法。
【請求項4】
前記第2移動ロボットが前記第1移動ロボットに追従するように移動するステップは、
前記第1移動ロボットが移動した経路に関する経路情報を取得するステップと、
前記第2移動ロボットが移動するための経路計画を前記経路情報に基づいて生成するステップと、
前記経路計画に基づいて前記第2移動ロボットが移動するステップと、
を含む、請求項1に記載の方法。
【請求項5】
前記第1移動ロボットが移動した経路に関する経路情報を取得するステップにおいては、前記第2移動ロボットが前記経路情報を取得し、
前記第2移動ロボットが移動するための経路計画を前記経路情報に基づいて生成するステップにおいては、前記第2移動ロボットが前記経路計画を生成する、請求項4に記載の方法。
【請求項6】
前記第1環境情報及び前記第2環境情報に基づいて環境地図を生成するステップにおいては、
前記第2移動ロボットが、前記第1移動ロボットから前記第1環境情報を取得し、
前記第2移動ロボットが、前記第2検知手段から前記第2環境情報を取得し、
前記第2移動ロボットが、取得した前記第1環境情報及び前記第2環境情報に基づいて前記環境地図を生成する、請求項1に記載の方法。
【請求項7】
前記第1環境情報及び前記第2環境情報に基づいて環境地図を生成するステップにおいては、
前記第1移動ロボットが、前記第2移動ロボットから前記第2環境情報を取得し、
前記第1移動ロボットが、前記第1検知手段から前記第1環境情報を取得し、
前記第1移動ロボットが、取得した前記第1環境情報及び前記第2環境情報に基づいて前記環境地図を生成する、請求項1に記載の方法。
【請求項8】
前記第1移動ロボットが移動した経路に関する経路情報を取得するステップにおいては、サーバが前記経路情報を取得し、
前記第2移動ロボットが移動するための経路計画を前記経路情報に基づいて生成するステップにおいては、前記サーバが前記経路計画を生成し、
更に、前記サーバが、前記経路計画を前記第2移動ロボットに送信するステップ、を含む、請求項4に記載の方法。
【請求項9】
前記第1環境情報及び前記第2環境情報に基づいて環境地図を生成するステップにおいては、
前記サーバが、前記第1移動ロボットから前記第1環境情報を取得し、
前記サーバが、前記第2移動ロボットから前記第2環境情報を取得し、
前記サーバが、取得した前記第1環境情報及び前記第2環境情報に基づいて前記環境地図を生成する、請求項1に記載の方法。
【請求項10】
前記第2移動ロボットが前記第1移動ロボットに追従するように移動するステップは、
前記第2移動ロボットに設けられた第3検知手段が、前記第1移動ロボットを検知するステップと、
前記第3検知手段による検知結果に基づいて、前記第2移動ロボットが移動するための経路計画を生成するステップと、
前記経路計画に基づいて、前記第2移動ロボットが移動するステップと、
を含む、請求項1に記載の方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、環境地図を生成するための方法、システム、及び移動ロボットに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
人間やその他の機械が存在する環境空間を移動ロボットが自律的に移動するために、移動ロボット自身が自己の位置・姿勢、周辺環境を正しく認識を行うことが必要となる。従来、このような認識を行うための手法として、環境の地図を作成しながら同時に自己位置の推定を行うSLAM(Simultaneous Localization And Mapping)技術が知られている。
【0003】
例えば、特許文献1には複数の異なるセンサの出力に基づいて自己位置推定を行う複数の推定器の信頼度を評価し、信頼度に応じて複数の推定器による自己位置推定情報を統合する、ロボットシステムが開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2012-248032号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
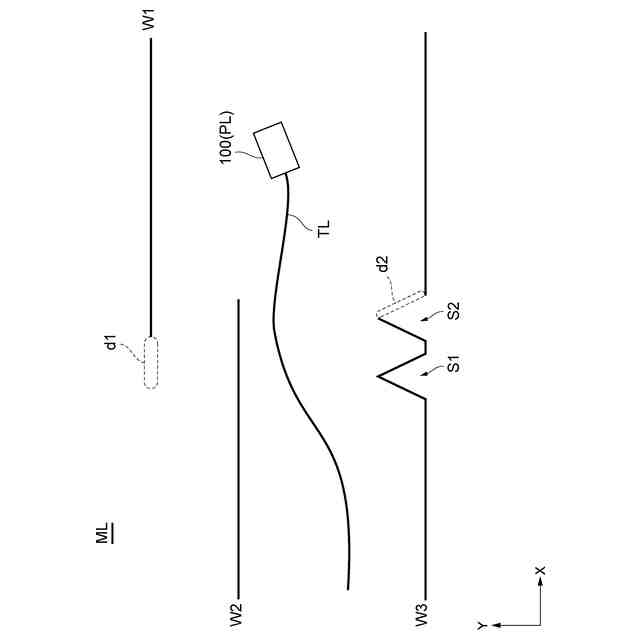
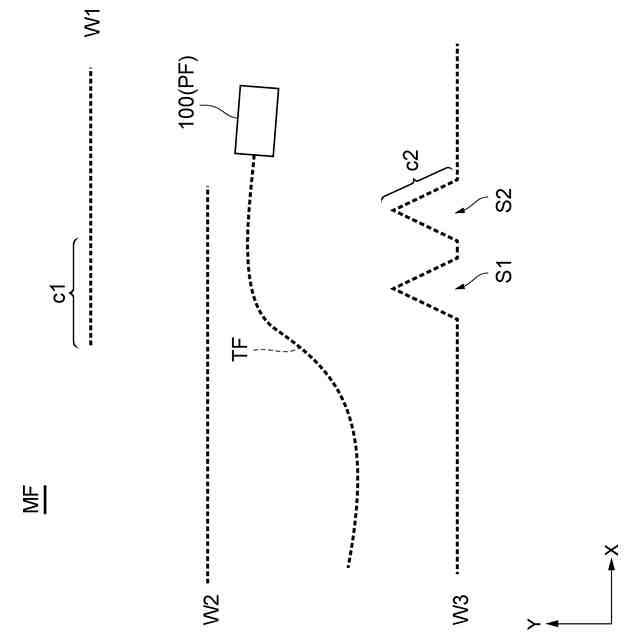
しかしながら、センサによる検出可能な範囲や設けることの可能なセンサの数には限界があるため、環境中の複雑な形状に起因してオクルージョンによって、構築した地図上で一部のエリアに欠損が生じる場合がある。また、環境中の反射面のために、構築されたマップに欠損やエラーが発生する場合がある。これら課題に対しては、移動ロボットによる移動やセンシングを繰り返すことや、マップを編集することが考えられるが、いずれの対策も時間やコストの負担が大きい。
【0006】
そこで、本発明は、低コスト且つ短時間で広範且つ高精度な環境地図を生成することの可能な環境地図を生成するための方法、システム、及び移動ロボットを提供する。
【課題を解決するための手段】
【0007】
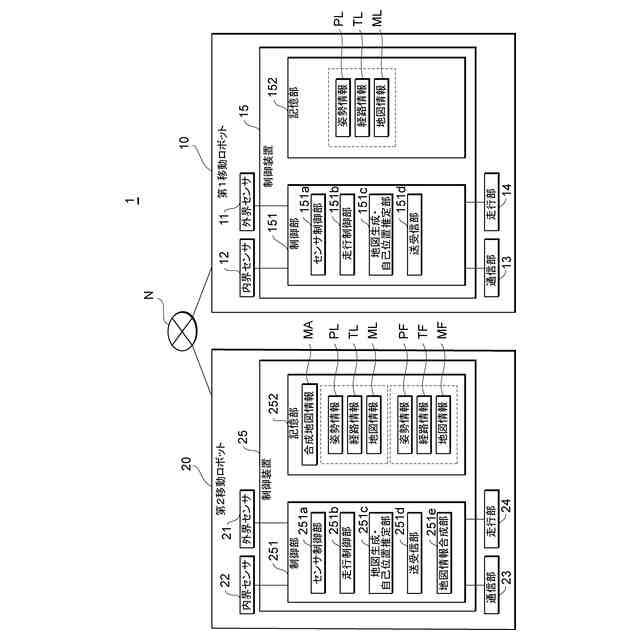
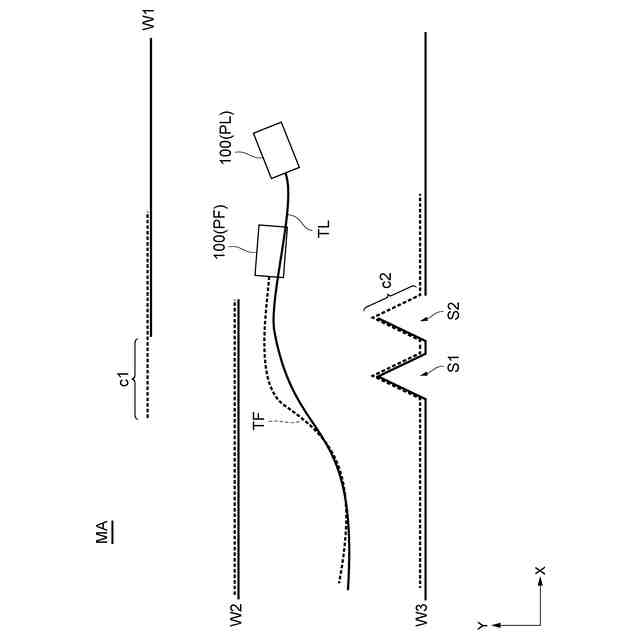
本発明の一態様に係る方法は、環境を検知して第1環境情報を生成するための第1検知手段が設けられた移動可能な第1移動ロボットと、環境を検知して第2環境情報を生成するための第2検知手段が設けられた移動可能な第2移動ロボットと、を制御して環境地図を生成する方法であって、第1移動ロボットが移動するステップと、移動する第1移動ロボットの第1検知手段が環境を検知することにより、第1環境情報を生成するステップと、第2移動ロボットが第1移動ロボットに追従するように移動するステップと、移動する第2移動ロボットの第2検知手段が環境を検知することにより、第2環境情報を生成するステップと、第1環境情報及び第2環境情報に基づいて環境地図を生成するステップと、を含む。
【0008】
この態様によれば、環境内を移動する第1移動ロボットに設けられた第1検知手段が環境を検知することにより生成された第1環境情報と、環境内を第1移動ロボットに追従するように移動する第2移動ロボットに設けられた第2検知手段が環境を検知することにより生成された第2環境情報とに基づいて、環境地図が生成される。そのため、低コスト且つ短時間で広範且つ高精度な環境地図を生成することが可能となる。
【0009】
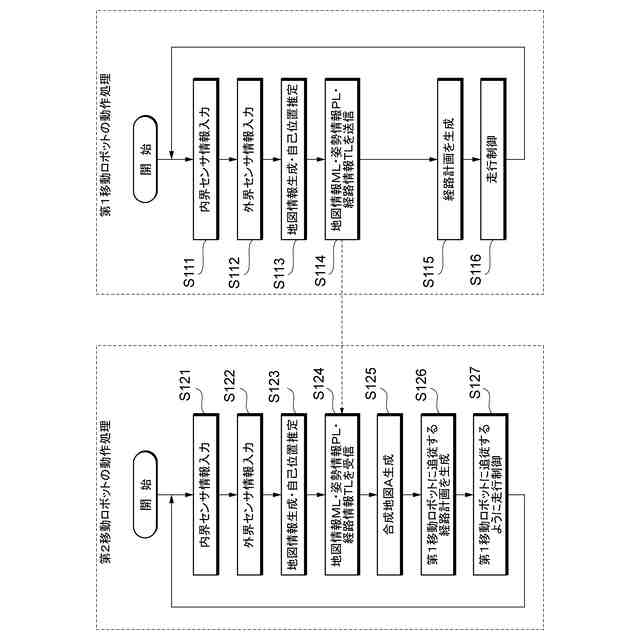
上記態様において、第2移動ロボットが第1移動ロボットに追従するように移動するステップは、第1移動ロボットが移動した経路に関する経路情報を取得するステップと、第2移動ロボットが移動するための経路計画を経路情報に基づいて生成するステップと、経路計画に基づいて第2移動ロボットが移動するステップと、を含んでもよい。
【0010】
この態様によれば、第1移動ロボットが移動した経路に関する経路情報に基づいて生成された経路計画に基づいて、第2移動ロボットが第1移動ロボットに追従するように移動するため、第2移動ロボットによる第1移動ロボットの追従の精度が向上し、環境地図の完成度が向上する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
オムロン株式会社
椅子
1か月前
オムロン株式会社
通信装置
1か月前
オムロン株式会社
ドライバ
1か月前
オムロン株式会社
電磁継電器
1か月前
オムロン株式会社
光電センサ
2日前
オムロン株式会社
電磁継電器
1か月前
オムロン株式会社
電磁継電器
1か月前
オムロン株式会社
検査ソケット
27日前
オムロン株式会社
プローブピン
27日前
オムロン株式会社
トリガスイッチ
1か月前
オムロン株式会社
センサユニット
1か月前
オムロン株式会社
生体信号計測装置
23日前
オムロン株式会社
生体信号計測装置
23日前
オムロン株式会社
生体信号計測装置
23日前
オムロン株式会社
プッシュイン式端子台
3日前
オムロン株式会社
プッシュイン式端子台
3日前
オムロン株式会社
光学機器およびその製造方法
3日前
オムロン株式会社
通信装置、および信号復調方法
23日前
オムロン株式会社
無停電電源装置及び増設ユニット
3日前
オムロン株式会社
支援装置、支援方法及びプログラム
24日前
オムロン株式会社
サーボドライバ及び射出成型システム
9日前
オムロン株式会社
回転装置及び磁気粘性流体の充填方法
24日前
オムロン株式会社
画像処理装置、画像処理方法およびプログラム
3日前
オムロン株式会社
画像処理装置、画像処理方法およびプログラム
3日前
オムロン株式会社
ペンデバイス、プログラム、及びペンシステム
1か月前
オムロン株式会社
画像処理装置、画像処理方法およびプログラム
1か月前
オムロン株式会社
電力計、電流補正方法及び電力開閉モジュール
3日前
オムロン株式会社
スイッチ、スイッチアッセンブリ及び操作装置
1か月前
オムロン株式会社
制御システム、設計装置、および設計プログラム
1か月前
オムロン株式会社
状態管理非同期ランタイムのリアルタイム視覚化
1か月前
オムロン株式会社
情報処理システム、情報処理方法およびプログラム
1か月前
オムロン株式会社
情報処理システム、情報処理方法およびプログラム
1か月前
オムロン株式会社
情報処理システム、情報処理方法およびプログラム
1か月前
オムロン株式会社
ロボットを制御するシステム、方法およびプログラム
3日前
オムロン株式会社
学習支援装置、学習支援方法、および学習支援プログラム
1か月前
オムロン株式会社
光学的情報読取装置および光学的情報読取装置の制御方法
3日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ