TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025011446
公報種別
公開特許公報(A)
公開日
2025-01-24
出願番号
2023113567
出願日
2023-07-11
発明の名称
情報処理システム、情報処理方法およびプログラム
出願人
オムロン株式会社
代理人
弁理士法人深見特許事務所
主分類
G05B
23/02 20060101AFI20250117BHJP(制御;調整)
要約
【課題】監視対象の異常な動作の原因探索を適切に支援可能な情報処理システムを提供する。
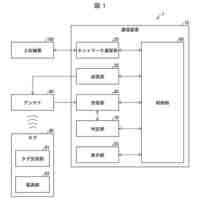
【解決手段】情報処理システムは、監視対象の状態を表す複数の変数の実績値の時系列データを用いた情報処理を行なう。情報処理システムは、複数の変数のうち第1変数を除く1以上の第2変数の実績値を用いて、仮想空間における監視対象に対応する仮想モデルの挙動をシミュレートするシミュレータを備える。さらに、情報処理システムは、仮想モデルにおいて生成される第1変数の仮想値と時系列データによって示される第1変数の実績値との差が基準を超える異常時刻を特定する特定モジュールを備える。
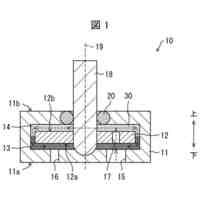
【選択図】図1
特許請求の範囲
【請求項1】
監視対象の状態を表す複数の変数の実績値の時系列データを用いた情報処理を行なう情報処理システムであって、
前記複数の変数のうち第1変数を除く1以上の第2変数の実績値を用いて、仮想空間における前記監視対象に対応する仮想モデルの挙動をシミュレートするシミュレータと、
前記仮想モデルにおいて生成される前記第1変数の仮想値と前記時系列データによって示される前記第1変数の実績値との差が基準を超える異常時刻を特定する特定モジュールとを備える、情報処理システム。
続きを表示(約 1,900 文字)
【請求項2】
前記異常時刻の一覧を示すデータを出力する出力モジュールをさらに備える、請求項1に記載の情報処理システム。
【請求項3】
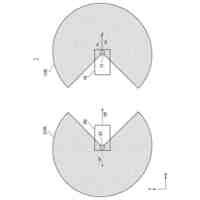
前記監視対象は、対象物の存在を検知する第1センサを含み、
前記第1変数は、前記第1センサによる検知結果を表し、
前記シミュレータは、
前記仮想空間における前記対象物に対応する仮想対象物の移動に基づいて、前記第1変数の仮想値を計算する、請求項1または2に記載の情報処理システム。
【請求項4】
前記監視対象は、視覚センサを含み、
前記1以上の第2変数は、前記視覚センサによって計測された前記対象物の実位置を示す特定変数を含み、
前記仮想モデルは、前記第1センサに対応する仮想センサを含み、
前記シミュレータは、
前記仮想空間において、前記特定変数の実績値によって表される実位置に対応する仮想初期位置に前記仮想対象物を配置し、
前記仮想空間において、前記仮想モデルの挙動に応じて前記仮想対象物を前記仮想初期位置から移動させ、
前記仮想空間における前記仮想対象物と前記仮想センサとの位置関係に基づいて、前記第1変数の仮想値を計算する、請求項3に記載の情報処理システム。
【請求項5】
前記仮想モデルは、前記第1センサに対応する仮想センサを含み、
前記シミュレータは、
前記監視対象を撮影するカメラから得られた実画像に基づいて前記対象物の実位置を特定し、
前記仮想空間において、前記実位置に対応する仮想初期位置に前記仮想対象物を配置し、
前記仮想空間において、前記仮想モデルの挙動に応じて前記仮想対象物を前記仮想初期位置から移動させ、
前記仮想空間における前記仮想対象物と前記仮想センサとの位置関係に基づいて、前記第1変数の仮想値を計算する、請求項3に記載の情報処理システム。
【請求項6】
前記第1センサは、前記監視対象の第1の場所における前記対象物の存在を検知し、
前記監視対象は、前記第1の場所よりも上流の第2の場所における前記対象物の存在を検知する第2センサを含み、
前記1以上の第2変数は、前記第2センサによる検知結果を表す特定変数を含み、
前記仮想モデルは、前記第1センサに対応する仮想センサを含み、
前記シミュレータは、
前記特定変数の実績値が前記対象物の存在を示すことに基づいて、前記仮想空間における前記第2の場所に対応する仮想初期位置に前記仮想対象物を配置し、
前記仮想空間において、前記仮想モデルの挙動に応じて前記仮想対象物を前記仮想初期位置から移動させ、
前記仮想空間における前記仮想対象物と前記仮想センサとの位置関係に基づいて、前記第1変数の仮想値を計算する、請求項3に記載の情報処理システム。
【請求項7】
前記第1変数は、前記監視対象に含まれる可動部品の位置または速度またはトルクであり、
前記1以上の第2変数は、前記可動部品に対する指令値を示す変数を含み、
前記シミュレータは、前記指令値に基づいて、前記可動部品に対応する仮想可動部品の前記第1変数の仮想値を計算する、請求項1または2に記載の情報処理システム。
【請求項8】
監視対象の状態を表す複数の変数の実績値の時系列データを用いた情報処理方法であって、
1以上のプロセッサが、前記複数の変数のうち第1変数を除く1以上の第2変数の実績値を用いて、仮想空間における前記監視対象に対応する仮想モデルの挙動をシミュレートすることと、
前記1以上のプロセッサが、前記仮想モデルにおいて生成される前記第1変数の仮想値と前記時系列データによって示される前記第1変数の実績値との差が基準を超える異常時刻を特定することとを備える、情報処理方法。
【請求項9】
監視対象の状態を表す複数の変数の実績値の時系列データを用いた情報処理方法をコンピュータに実行させるプログラムであって、
前記情報処理方法は、
前記複数の変数のうち第1変数を除く1以上の第2変数の実績値を用いて、仮想空間における前記監視対象に対応する仮想モデルの挙動をシミュレートすることと、
前記仮想モデルにおいて生成される前記第1変数の仮想値と前記時系列データによって示される前記第1変数の実績値との差が基準を超える異常時刻を特定することとを備える、プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、情報処理システム、情報処理方法およびプログラムに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
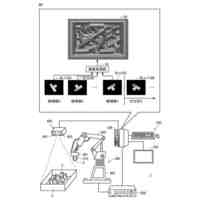
生産設備などの監視対象の異常な動作の原因調査を支援する装置が開発されている。特開2022-99341号公報(特許文献1)は、監視対象を撮影することにより得られる動画データと、仮想的な監視対象の動作を再現させた動作再現模擬データとを表示部に表示する技術を開示している。動作再現模擬データは、監視対象の状態と、監視対象と監視対象を制御する制御装置との間の制御信号の入出力データと、を時系列で記録したログデータに基づいて生成される。
【先行技術文献】
【特許文献】
【0003】
特開2022-99341号公報
特開2017-97426号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に開示の技術によれば、ユーザは、動画データによって示される実動画または動作再現模擬データによって示される仮想動画の中から異常が発生している時刻(以下、「異常時刻」と称される)を見つけ、その前後の監視対象の状態を確認する。しかしながら、撮影時間が長い場合、実動画または仮想動画から異常時刻を目視で見つけるのに時間がかかる。そのため、監視対象の異常な動作の原因探索に時間がかかる。
【0005】
監視対象に異常が発生したときのログデータによって示される異常波形と、監視対象が正常であるときのログデータによって示される正常波形とを比較することにより、異常時刻を特定することが考えられる。しかしながら、監視対象において規則的な動作が実施されないケース、例えば、ワークがランダムに搬送されるケースでは、正常波形を準備することができない。また、導入直後の監視対象についても、正常波形を準備することができない。したがって、これらの場合には、ユーザは、異常波形と正常波形との比較によって、異常時刻を特定できない。そのため、監視対象の異常な動作の原因探索に時間がかかる。
【0006】
本開示は、上記の問題に鑑みてなされたものであり、その目的は、監視対象の異常な動作の原因探索を適切に支援可能な情報処理システム、情報処理方法およびプログラムを提供することである。
【課題を解決するための手段】
【0007】
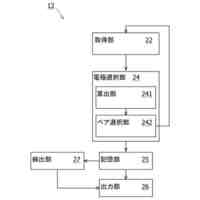
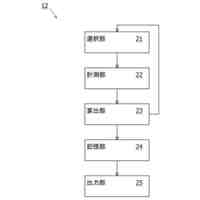
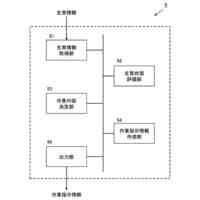
本開示の一例によれば、情報処理システムは、監視対象の状態を表す複数の変数の実績値の時系列データを用いた情報処理を行なう。情報処理システムは、複数の変数のうち第1変数を除く1以上の第2変数の実績値を用いて、仮想空間における監視対象に対応する仮想モデルの挙動をシミュレートするシミュレータを備える。さらに、情報処理システムは、仮想モデルにおいて生成される第1変数の仮想値と時系列データによって示される第1変数の実績値との差が基準を超える異常時刻を特定する特定モジュールを備える。
【0008】
この開示によれば、ユーザは、特定モジュールによって特定された異常時刻およびその前後の監視対象の状態を詳細に調査することにより、監視対象の異常な動作の原因を探索しやすくなる。このように、本開示に係る情報処理システムは、監視対象の異常な動作の原因探索を適切に支援できる。
【0009】
上述の開示において、情報処理システムは、異常時刻の一覧を示すデータを出力する出力モジュールをさらに備える。この開示によれば、ユーザは、一覧を用いて、異常時刻を容易に認識できる。
【0010】
上述の開示において、監視対象は、対象物の存在を検知する第1センサを含む。第1変数は、第1センサによる検知結果を表す。シミュレータは、仮想空間における対象物に対応する仮想対象物の移動に基づいて、第1変数の仮想値を計算する。この開示によれば、ユーザは、第1センサの異常時刻を把握できる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
オムロン株式会社
椅子
25日前
オムロン株式会社
ドライバ
1か月前
オムロン株式会社
通信装置
17日前
オムロン株式会社
電磁継電器
18日前
オムロン株式会社
電磁継電器
18日前
オムロン株式会社
電磁継電器
18日前
オムロン株式会社
プローブピン
14日前
オムロン株式会社
検査ソケット
14日前
オムロン株式会社
トリガスイッチ
18日前
オムロン株式会社
生体信号計測装置
10日前
オムロン株式会社
生体信号計測装置
10日前
オムロン株式会社
生体信号計測装置
10日前
オムロン株式会社
通信装置、および信号復調方法
10日前
オムロン株式会社
支援装置、支援方法及びプログラム
11日前
オムロン株式会社
回転装置及び磁気粘性流体の充填方法
11日前
オムロン株式会社
画像処理装置、画像処理方法およびプログラム
17日前
オムロン株式会社
スイッチ、スイッチアッセンブリ及び操作装置
17日前
オムロン株式会社
制御システム、設計装置、および設計プログラム
24日前
オムロン株式会社
制御装置、データ収集方法、およびデータ収集プログラム
17日前
オムロン株式会社
生体信号処理装置、生体信号計測装置、生体信号処理方法
10日前
オムロン株式会社
制御装置、学習済みモデル生成装置、方法、及びプログラム
18日前
オムロン株式会社
環境地図を生成するための方法、システム、及び移動ロボット
18日前
オムロン株式会社
予測システム、アグリゲーションシステム、方法およびプログラム
18日前
オムロン株式会社
施設管理システム及び施設管理方法
3日前
オムロン株式会社
カード処理装置およびこれを備えたカードゲームシステム、カード処理方法およびカード処理プログラム
17日前
オムロン株式会社
栽培支援システム、栽培支援装置、栽培支援方法及びプログラム
17日前
オムロン株式会社
工作機械コントローラ、コントローラ制御プログラム、ソースコード修正装置、およびソースコード修正プログラム
17日前
個人
無人作業システム
1か月前
アズビル株式会社
制御装置
24日前
村田機械株式会社
産業機械
1か月前
株式会社ダイヘン
移動体
2か月前
神港テクノス株式会社
制御装置
2か月前
株式会社ダイヘン
移動体
2か月前
コフロック株式会社
流量制御装置
25日前
トヨタ自動車株式会社
自律移動体
1か月前
株式会社丸和製作所
入力機器
24日前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ