TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025034831
公報種別
公開特許公報(A)
公開日
2025-03-13
出願番号
2023141479
出願日
2023-08-31
発明の名称
画像処理装置、画像処理方法およびプログラム
出願人
オムロン株式会社
代理人
弁理士法人深見特許事務所
主分類
G06T
7/70 20170101AFI20250306BHJP(計算;計数)
要約
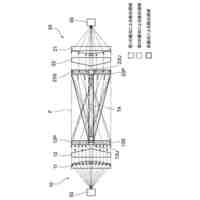
【課題】オクルージョンが発生している領域の三次元形状を計測することに適した撮像位置候補を決定できる画像処理装置を提供する。
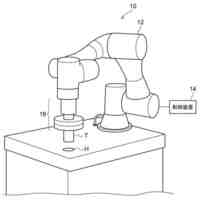
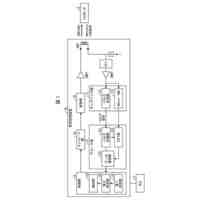
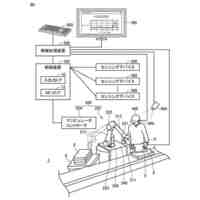
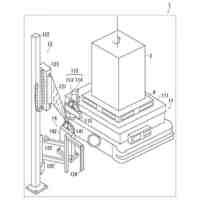
【解決手段】画像処理装置は、視点変換部と、計算部と、決定部とを備える。視点変換部は、ロボットアームに取り付けられた三次元カメラの撮影画像から得られる実デプスマップを、複数の仮想視点から見た複数の仮想デプスマップに変換する。計算部は、複数の仮想デプスマップの各々について、距離情報が欠損している欠損領域の面積を計算する。決定部は、欠損領域の面積が相対的に大きい1以上の仮想デプスマップに対応する1以上の仮想視点を三次元カメラの次の1以上の撮像位置候補として決定する。
【選択図】図1
特許請求の範囲
【請求項1】
画像処理装置であって、
ロボットアームに取り付けられた三次元カメラの撮影画像から得られる実デプスマップを、複数の仮想視点から見た複数の仮想デプスマップに変換する視点変換部と、
前記複数の仮想デプスマップの各々について、距離情報が欠損している欠損領域の面積を計算する計算部と、
前記複数の仮想デプスマップのうち前記面積が相対的に大きい1以上の仮想デプスマップに対応する1以上の仮想視点を前記三次元カメラの次の1以上の撮像位置候補として決定する決定部とを備える、画像処理装置。
続きを表示(約 1,200 文字)
【請求項2】
ユーザインターフェースへの入力に応じて、前記三次元カメラの可動範囲を設定する範囲設定部をさらに備え、
前記視点変換部は、前記可動範囲内に前記複数の仮想視点を配置する、請求項1に記載の画像処理装置。
【請求項3】
前記欠損領域は、前記複数の仮想デプスマップの各々のうち、前記実デプスマップの画枠に対応する仮想枠線外の領域を含まない、請求項1に記載の画像処理装置。
【請求項4】
前記計算部は、前記距離情報が欠損している画素が予め定められた個数以上連結している領域を前記欠損領域として決定する、請求項1に記載の画像処理装置。
【請求項5】
少なくとも前記面積を含む1以上の指標に基づいて、前記1以上の撮像位置候補の各々に対して優先度を設定する優先度設定部と、
前記1以上の撮像位置候補から選択される撮像位置候補に前記三次元カメラを移動可能か否かの問い合わせを、前記ロボットアームを制御するロボットコントローラに出力する出力部とをさらに備え、
前記出力部は、前記1以上の撮像位置候補の中から、優先度の高い順に前記問い合わせの対象となる撮像位置候補を選択する、請求項1から4のいずれか1項に記載の画像処理装置。
【請求項6】
前記1以上の指標は、前記1以上の撮像位置候補のうちの対象の撮像位置候補に前記三次元カメラを移動させるための前記ロボットアームの移動量を含む、請求項5に記載の画像処理装置。
【請求項7】
画像処理方法であって、
1以上のプロセッサが、ロボットアームに取り付けられた三次元カメラの撮影画像から得られる実デプスマップを、複数の仮想視点から見た複数の仮想デプスマップに変換することと、
前記1以上のプロセッサが、前記複数の仮想デプスマップの各々について、距離情報が欠損している欠損領域の面積を計算することと、
前記1以上のプロセッサが、前記複数の仮想デプスマップのうち前記面積が相対的に大きい1以上の仮想デプスマップに対応する1以上の仮想視点を前記三次元カメラの次の1以上の撮像位置候補として決定することとを備える、画像処理方法。
【請求項8】
画像処理方法をコンピュータに実行させるプログラムであって、
前記画像処理方法は、
ロボットアームに取り付けられた三次元カメラの撮影画像から得られる実デプスマップを、複数の仮想視点から見た複数の仮想デプスマップに変換することと、
前記複数の仮想デプスマップの各々について、距離情報が欠損している欠損領域の面積を計算することと、
前記複数の仮想デプスマップのうち前記面積が相対的に大きい1以上の仮想デプスマップに対応する1以上の仮想視点を前記三次元カメラの次の1以上の撮像位置候補として決定することとを備える、プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、画像処理装置、画像処理方法およびプログラムに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来、三次元カメラから得られる画像に基づいて複数のワークの三次元形状を計測し、計測結果に基づいてロボットによるワークのピッキング動作を制御する画像処理装置が知られている。
【0003】
ある視点から見たときに、あるワークの一部が他の物体に隠れてしまうオクルージョンが発生し得る。そのため、オクルージョンの発生した箇所を計測できるように、三次元カメラの撮像位置を移動させる方法が提案されている。三次元カメラの撮像位置は、タクトの遅延またはワークの取り残しが抑制されるように、現在のワークの状態に応じて適切に決定されることが望ましい。
【0004】
例えば、特開2019-207140号公報(特許文献1)は、計測された三次元形状から高さ情報が欠損している欠損領域を抽出し、欠損領域の周囲の高さ情報に基づいて、欠損領域の高さ情報を取得しやすいように三次元カメラの撮像位置を決定する技術を開示している。
【先行技術文献】
【特許文献】
【0005】
特開2019-207140号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1に開示の技術は、計測された三次元形状に複数の欠損領域が存在する場合、最も高い位置の欠損領域のみに着目し、着目した欠陥領域の高さ情報を取得しやすいように撮像位置を決定する。そのため、着目した欠陥領域以外にオクルージョンが発生している領域について、次の撮像位置に対応する画像から三次元形状を計測できない可能性がある。
【0007】
本開示は、このような実情を鑑みてなされたものであり、その目的は、オクルージョンが発生している領域の三次元形状を計測することに適した撮像位置候補を決定することが可能な画像処理装置、画像処理方法およびプログラムを提供することである。
【課題を解決するための手段】
【0008】
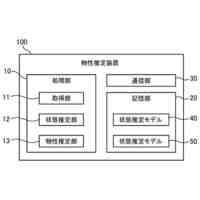
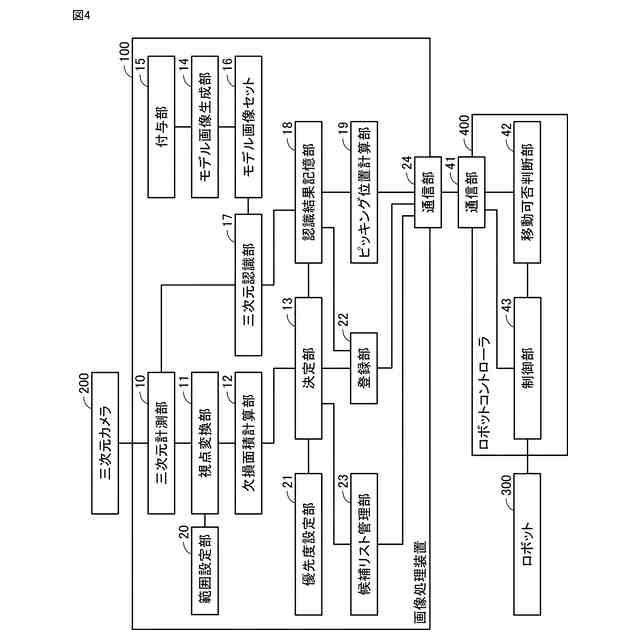
本開示の一例によれば、画像処理装置は、視点変換部と、計算部と、決定部とを備える。視点変換部は、ロボットアームに取り付けられた三次元カメラの撮影画像から得られる実デプスマップを、複数の仮想視点から見た複数の仮想デプスマップに変換する。計算部は、複数の仮想デプスマップの各々について、距離情報が欠損している欠損領域の面積を計算する。決定部は、複数の仮想デプスマップのうち面積が相対的に大きい1以上の仮想デプスマップに対応する1以上の仮想視点を三次元カメラの次の1以上の撮像位置候補として決定する。
【0009】
この開示によれば、1以上の撮像位置候補は、各仮想デプスマップにおける欠損領域の面積を考慮して、複数の仮想視点の中から決定される。仮想デプスマップの欠損領域は、実デプスマップの生成に使用された撮影画像に対応する撮像位置から見たときにオクルージョンが発生している領域に対応する。これにより、画像処理装置は、オクルージョンが発生している領域の三次元形状を計測することに適した撮像位置候補を決定できる。
【0010】
上述の開示において、画像処理装置は、ユーザインターフェースへの入力に応じて、三次元カメラの可動範囲を設定する範囲設定部をさらに備える。視点変換部は、可動範囲内に複数の仮想視点を配置する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
オムロン株式会社
光電センサ
29日前
オムロン株式会社
電磁継電器
8日前
オムロン株式会社
電磁継電器
8日前
オムロン株式会社
スレーブ装置
11日前
オムロン株式会社
トリガスイッチ
7日前
オムロン株式会社
トリガスイッチ
1か月前
オムロン株式会社
モバイルロボット
29日前
オムロン株式会社
スイッチング素子
1か月前
オムロン株式会社
モバイルロボット
29日前
オムロン株式会社
光干渉測距センサ
22日前
オムロン株式会社
回転装置及びマウス
11日前
オムロン株式会社
電力変換装置とその制御方法
1か月前
オムロン株式会社
情報取得装置、及び自動改札機
11日前
オムロン株式会社
情報処理システム、情報処理方法
29日前
オムロン株式会社
制御装置、方法、及びプログラム
24日前
オムロン株式会社
信号処理装置、及び信号処理方法
1か月前
オムロン株式会社
モデル生成方法及び推論プログラム
1か月前
オムロン株式会社
表示装置およびこれを備えた展示装置
1か月前
オムロン株式会社
表示装置およびこれを備えた展示装置
1か月前
オムロン株式会社
多関節ロボット、及びモバイルロボット
29日前
オムロン株式会社
協調作業システム、方法およびプログラム
11日前
オムロン株式会社
学習装置、操作情報変換装置及び学習方法
11日前
オムロン株式会社
信号制御システム、およびステップアップ方法
15日前
オムロン株式会社
スイッチユニットおよびこれを備えた展示装置
1か月前
オムロン株式会社
スイッチユニットおよびこれを備えた展示装置
1か月前
オムロン株式会社
状態推定装置、状態推定方法及び状態推定プログラム
29日前
オムロン株式会社
加熱炉、制御装置、制御プログラム、および制御方法
29日前
オムロン株式会社
物品包装システム、自律走行ロボット、及びプログラム
29日前
オムロン株式会社
バーコードリーダーにおける画像処理パラメータの決定
29日前
オムロン株式会社
パワーコンディショナ
28日前
オムロン株式会社
スイッチ、スイッチアッセンブリ、操作装置および操作用装置
29日前
個人
非正規コート
25日前
個人
人物再現システム
22日前
個人
在宅介護システム
7日前
個人
RFタグ読取装置
7日前
個人
AI飲食最適化プラグイン
15日前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ