TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025034832
公報種別
公開特許公報(A)
公開日
2025-03-13
出願番号
2023141480
出願日
2023-08-31
発明の名称
画像処理装置、画像処理方法およびプログラム
出願人
オムロン株式会社
代理人
弁理士法人深見特許事務所
主分類
G06T
7/70 20170101AFI20250306BHJP(計算;計数)
要約
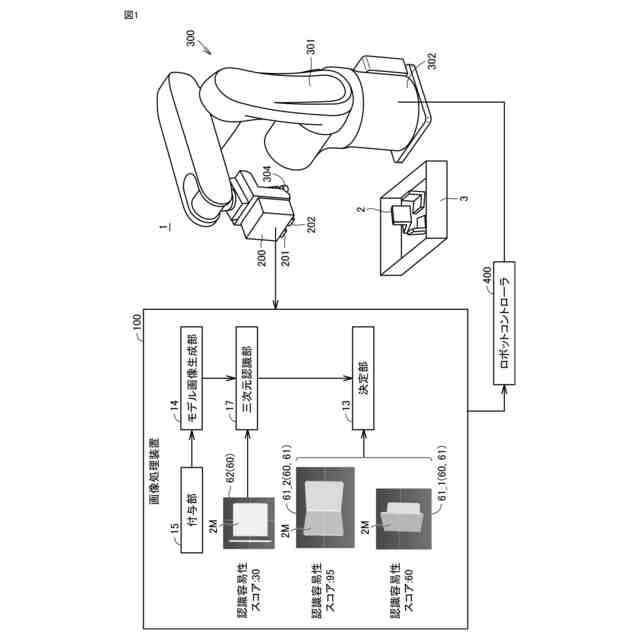
【課題】物体の姿勢の認識に適した撮像位置候補を決定できる画像処理装置を提供する。
【解決手段】画像処理装置は、物体認識処理の結果に基づいて、特定条件を満たす1以上の仮想視点を三次元カメラの次の1以上の撮像位置候補として決定する。特定条件は、仮想視点から見たときの1以上の特定物体の姿勢の第1認識容易性が、入力画像における1以上の特定物体の姿勢の第2認識容易性よりも高いという条件である。第1認識容易性は、仮想視点から見たときの1以上の特定物体の各々の推定される姿勢に対応する第1モデル画像の認識容易性スコアに基づいて評価される。第2認識容易性は、1以上の特定物体の各々の認識された姿勢に対応する第2モデル画像の認識容易性スコアに基づいて評価される。
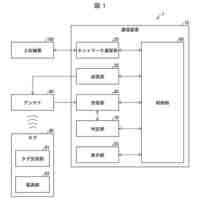
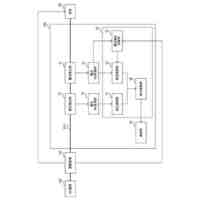
【選択図】図1
特許請求の範囲
【請求項1】
ロボットアームに取り付けられた三次元カメラの撮影に基づいて得られる入力画像に対して画像処理を行なう画像処理装置であって、
物体のモデルを用いて、前記モデルの姿勢が互いに異なる複数のモデル画像を生成する生成部と、
前記複数のモデル画像を用いたテンプレートマッチングによって、前記入力画像から前記物体の位置姿勢を認識する物体認識処理を繰り返し実行する物体認識部と、
前記複数のモデル画像の各々に、前記物体の姿勢の認識容易性を表す第1スコアを付与する付与部と、
前記物体認識処理の結果に基づいて、特定条件を満たす1以上の仮想視点を前記三次元カメラの次の1以上の撮像位置候補として決定する決定部とを備え、
前記物体認識処理の結果は、前記入力画像に含まれる1以上の特定物体について認識された姿勢を示し、
前記特定条件は、前記仮想視点から見たときの前記1以上の特定物体の姿勢の第1認識容易性が、前記入力画像における前記1以上の特定物体の姿勢の第2認識容易性よりも高いという条件であり、
前記第1認識容易性は、前記複数のモデル画像のうち前記仮想視点から見たときの前記1以上の特定物体の各々の推定される姿勢に対応する第1モデル画像の前記第1スコアに基づいて評価され、
前記推定される姿勢は、前記認識された姿勢と、前記仮想視点と、前記三次元カメラの最新の撮像位置とに基づいて推定され、
前記第2認識容易性は、前記複数のモデル画像のうち前記1以上の特定物体の各々の前記認識された姿勢に対応する第2モデル画像の前記第1スコアに基づいて評価される、画像処理装置。
続きを表示(約 2,700 文字)
【請求項2】
前記物体認識処理の結果に基づいて、前記ロボットアームによるピッキング対象となる対象物体を選択する選択部をさらに備え、
前記物体認識処理は、前記複数のモデル画像の各々と前記入力画像との一致度合いを表す第2スコアを算出することを含み、
前記1以上の特定物体は、前記対象物体以外の物体のうち、最も高い前記第2スコアに対応する位置姿勢を有する第1特定物体を含み、
前記決定部は、
前記複数のモデル画像の中から、前記第1特定物体の前記認識された姿勢に対応する前記第2モデル画像よりも前記第1スコアの高い1以上のモデル画像の各々を前記第1モデル画像として抽出し、
前記1以上の撮像位置候補の各々から見たときの前記第1特定物体の前記推定される姿勢が前記第1モデル画像の前記モデルの姿勢と一致するように、前記1以上の撮像位置候補を決定する、請求項1に記載の画像処理装置。
【請求項3】
不適切位置を登録する登録部をさらに備え、
前記決定部は、前記不適切位置以外の位置を前記1以上の撮像位置候補として決定し、
前記1以上の特定物体は、前回の物体認識処理において前記位置姿勢が認識された第2特定物体を含み、
前記登録部は、前記前回の物体認識処理の結果から推定される、前記最新の撮像位置から見たときの前記第2特定物体の姿勢に対応する前記第1モデル画像と、最新の物体認識処理において認識された前記第2特定物体の姿勢に対応する前記第2モデル画像とが一致しないことに応じて、前回の撮像位置と前記最新の撮像位置とを前記不適切位置として決定する、請求項1に記載の画像処理装置。
【請求項4】
ユーザインターフェースへの入力に応じて、前記三次元カメラの可動範囲を設定する範囲設定部をさらに備え、
前記決定部は、前記可動範囲の中から前記1以上の撮像位置候補を決定する、請求項1に記載の画像処理装置。
【請求項5】
少なくとも前記第1認識容易性を含む1以上の指標に基づいて、前記1以上の撮像位置候補の各々に対して優先度を設定する優先度設定部と、
前記1以上の撮像位置候補から選択される撮像位置候補に前記三次元カメラを移動可能か否かの問い合わせを、前記ロボットアームを制御するロボットコントローラに出力する出力部とをさらに備え、
前記出力部は、前記1以上の撮像位置候補の中から、優先度の高い順に前記問い合わせの対象となる撮像位置候補を選択する、請求項1から4のいずれか1項に記載の画像処理装置。
【請求項6】
前記1以上の指標は、前記1以上の撮像位置候補のうちの対象の撮像位置候補に前記三次元カメラを移動させるための前記ロボットアームの移動量を含む、請求項5に記載の画像処理装置。
【請求項7】
ロボットアームに取り付けられた三次元カメラの撮影に基づいて得られる入力画像に対する画像処理方法であって、
1以上のプロセッサが、物体のモデルを用いて、前記モデルの姿勢が互いに異なる複数のモデル画像を生成することと、
前記1以上のプロセッサが、前記複数のモデル画像を用いたテンプレートマッチングによって、前記入力画像から前記物体の位置姿勢を認識する物体認識処理を繰り返し実行することと、
前記1以上のプロセッサが、前記複数のモデル画像の各々に、前記物体の認識容易性を表す第1スコアを付与することと、
前記1以上のプロセッサが、前記物体認識処理の結果に基づいて、特定条件を満たす1以上の仮想視点を前記三次元カメラの次の1以上の撮像位置候補として決定することとを備え、
前記物体認識処理の結果は、前記入力画像に含まれる1以上の特定物体について認識された姿勢を示し、
前記特定条件は、前記仮想視点から見たときの前記1以上の特定物体の第1認識容易性が、前記入力画像における前記1以上の特定物体の第2認識容易性よりも高いという条件であり、
前記決定することは、
前記1以上のプロセッサが、前記複数のモデル画像のうち前記仮想視点から見たときの前記1以上の特定物体の各々の推定される姿勢に対応する第1モデル画像の前記第1スコアに基づいて、前記第1認識容易性を評価することと、
前記1以上のプロセッサが、前記認識された姿勢と、前記仮想視点と、前記三次元カメラの最新の撮像位置とに基づいて前記推定される姿勢を推定することと、
前記1以上のプロセッサが、前記複数のモデル画像のうち前記1以上の特定物体の各々の前記認識された姿勢に対応する第2モデル画像の前記第1スコアに基づいて前記第2認識容易性を評価することとを含む、画像処理方法。
【請求項8】
ロボットアームに取り付けられた三次元カメラの撮影に基づいて得られる入力画像に対する画像処理方法をコンピュータに実行させるプログラムであって、
前記画像処理方法は、
物体のモデルを用いて、前記モデルの姿勢が互いに異なる複数のモデル画像を生成することと、
前記複数のモデル画像を用いたテンプレートマッチングによって、前記入力画像から前記物体の位置姿勢を認識する物体認識処理を繰り返し実行することと、
前記複数のモデル画像の各々に、前記物体の認識容易性を表す第1スコアを付与することと、
前記物体認識処理の結果に基づいて、特定条件を満たす1以上の仮想視点を前記三次元カメラの次の1以上の撮像位置候補として決定することとを備え、
前記物体認識処理の結果は、前記入力画像に含まれる1以上の特定物体について認識された姿勢を示し、
前記特定条件は、前記仮想視点から見たときの前記1以上の特定物体の第1認識容易性が、前記入力画像における前記1以上の特定物体の第2認識容易性よりも高いという条件であり、
前記決定することは、
前記複数のモデル画像のうち前記仮想視点から見たときの前記1以上の特定物体の各々の推定される姿勢に対応する第1モデル画像の前記第1スコアに基づいて、前記第1認識容易性を評価することと、
前記認識された姿勢と、前記仮想視点と、前記三次元カメラの最新の撮像位置とに基づいて前記推定される姿勢を推定することと、
前記複数のモデル画像のうち前記1以上の特定物体の各々の前記認識された姿勢に対応する第2モデル画像の前記第1スコアに基づいて前記第2認識容易性を評価することとを含む、プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、画像処理装置、画像処理方法およびプログラムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
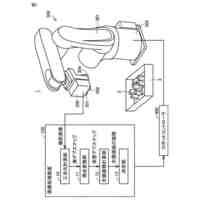
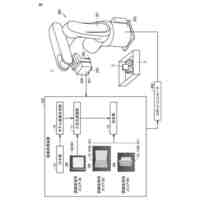
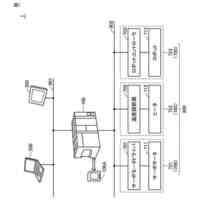
従来、三次元カメラから得られる画像に基づいて複数の物体(例えば、ワーク)の三次元形状を計測し、計測結果に基づいてロボットによるピッキング動作の対象となるワークの位置姿勢を認識する画像処理装置が知られている。
【0003】
ワークの見え方によってワーク位置姿勢を認識できないケースがあり得る。そのため、三次元カメラの撮像位置を変えながらワークを撮像する方法が提案されている。三次元カメラの撮像位置は、タクトの遅延またはワークの取り残しが抑制されるように、現在のワークの状態に応じて適切に決定されることが望ましい。
【0004】
例えば、特開2019-207140号公報(特許文献1)は、計測された三次元形状から高さ情報が欠損している欠損領域を抽出し、欠損領域の周囲の高さ情報に基づいて、欠損領域の高さ情報を取得しやすいように三次元カメラの撮像位置を決定する技術を開示している。
【先行技術文献】
【特許文献】
【0005】
特開2019-207140号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1に開示の技術によれば、欠損領域の高さ情報を取得しやすいように、次の撮像位置が決定される。しかしながら、欠損領域の高さ情報を取得しやすい撮像位置は、必ずしもワークの姿勢を認識しやすい位置とは限らない。
【0007】
本開示は、このような実情を鑑みてなされたものであり、その目的は、物体の姿勢の認識に適した撮像位置候補を決定することが可能な画像処理装置、画像処理方法およびプログラムを提供することである。
【課題を解決するための手段】
【0008】
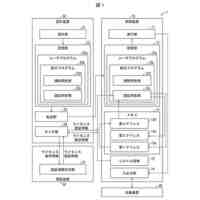
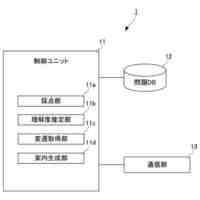
本開示の一例によれば、画像処理装置は、ロボットアームに取り付けられた三次元カメラの撮影に基づいて得られる入力画像に対して画像処理を行なう。画像処理装置は、生成部と、物体認識部と、付与部と、決定部とを備える。生成部は、物体のモデルを用いて、モデルの姿勢が互いに異なる複数のモデル画像を生成する。物体認識部は、複数のモデル画像を用いたテンプレートマッチングによって、入力画像から物体の位置姿勢を認識する物体認識処理を繰り返し実行する。付与部は、複数のモデル画像の各々に、物体の姿勢の認識容易性を表す第1スコアを付与する。決定部は、物体認識処理の結果に基づいて、特定条件を満たす1以上の仮想視点を三次元カメラの次の1以上の撮像位置候補として決定する。物体認識処理の結果は、入力画像に含まれる1以上の特定物体について認識された姿勢を示す。特定条件は、仮想視点から見たときの1以上の特定物体の姿勢の第1認識容易性が、入力画像における1以上の特定物体の姿勢の第2認識容易性よりも高いという条件である。第1認識容易性は、複数のモデル画像のうち仮想視点から見たときの1以上の特定物体の各々の推定される姿勢に対応する第1モデル画像の第1スコアに基づいて評価される。推定される姿勢は、認識された姿勢と、仮想視点と、三次元カメラの最新の撮像位置とに基づいて推定される。第2認識容易性は、複数のモデル画像のうち1以上の特定物体の各々の認識された姿勢に対応する第2モデル画像の第1スコアに基づいて評価される。
【0009】
この開示によれば、テンプレートマッチングを用いた1以上の特定物体の姿勢の認識容易性が向上する仮想視点が撮像位置候補として決定される。これにより、画像処理装置100は、1以上の特定物体の姿勢の認識に適した撮像位置候補を決定できる。
【0010】
上述の開示において、画像処理装置は、物体認識処理の結果に基づいて、ロボットアームによるピッキング対象となる対象物体を選択する選択部をさらに備える。物体認識処理は、複数のモデル画像の各々と入力画像との一致度合いを表す第2スコアを算出することを含む。1以上の特定物体は、対象物体以外の物体のうち、最も高い第2スコアに対応する位置姿勢を有する第1特定物体を含む。決定部は、複数のモデル画像の中から、第1特定物体の認識された姿勢に対応する第2モデル画像よりも第1スコアの高い1以上のモデル画像の各々を第1モデル画像として抽出する。決定部は、1以上の撮像位置候補の各々から見たときの第1特定物体の推定される姿勢が第1モデル画像のモデルの姿勢と一致するように、1以上の撮像位置候補を決定する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
オムロン株式会社
椅子
1か月前
オムロン株式会社
ドライバ
1か月前
オムロン株式会社
通信装置
27日前
オムロン株式会社
電磁継電器
28日前
オムロン株式会社
電磁継電器
28日前
オムロン株式会社
電磁継電器
28日前
オムロン株式会社
プローブピン
24日前
オムロン株式会社
検査ソケット
24日前
オムロン株式会社
トリガスイッチ
28日前
オムロン株式会社
生体信号計測装置
20日前
オムロン株式会社
生体信号計測装置
20日前
オムロン株式会社
生体信号計測装置
20日前
オムロン株式会社
プッシュイン式端子台
今日
オムロン株式会社
プッシュイン式端子台
今日
オムロン株式会社
光学機器およびその製造方法
今日
オムロン株式会社
通信装置、および信号復調方法
20日前
オムロン株式会社
無停電電源装置及び増設ユニット
今日
オムロン株式会社
支援装置、支援方法及びプログラム
21日前
オムロン株式会社
サーボドライバ及び射出成型システム
6日前
オムロン株式会社
回転装置及び磁気粘性流体の充填方法
21日前
オムロン株式会社
スイッチ、スイッチアッセンブリ及び操作装置
27日前
オムロン株式会社
画像処理装置、画像処理方法およびプログラム
27日前
オムロン株式会社
電力計、電流補正方法及び電力開閉モジュール
今日
オムロン株式会社
画像処理装置、画像処理方法およびプログラム
今日
オムロン株式会社
画像処理装置、画像処理方法およびプログラム
今日
オムロン株式会社
制御システム、設計装置、および設計プログラム
1か月前
オムロン株式会社
ロボットを制御するシステム、方法およびプログラム
今日
オムロン株式会社
制御装置、データ収集方法、およびデータ収集プログラム
27日前
オムロン株式会社
学習支援装置、学習支援方法、および学習支援プログラム
1か月前
オムロン株式会社
光学的情報読取装置および光学的情報読取装置の制御方法
今日
オムロン株式会社
生体信号処理装置、生体信号計測装置、生体信号処理方法
20日前
オムロン株式会社
文字入力装置、文字入力方法、および文字入力プログラム
6日前
オムロン株式会社
制御装置、学習済みモデル生成装置、方法、及びプログラム
28日前
オムロン株式会社
環境地図を生成するための方法、システム、及び移動ロボット
28日前
オムロン株式会社
予測システム、アグリゲーションシステム、方法およびプログラム
28日前
オムロン株式会社
施設管理システム及び施設管理方法
13日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ