TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025002265
公報種別
公開特許公報(A)
公開日
2025-01-09
出願番号
2023102323
出願日
2023-06-22
発明の名称
基板カセット移載装置
出願人
オムロン株式会社
代理人
弁理士法人深見特許事務所
主分類
B25J
13/08 20060101AFI20241226BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】基板カセットの載置面の高さ位置を測定することができる機能を備える基板カセット移載装置を提供する。
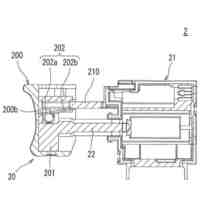
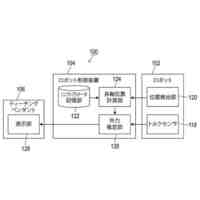
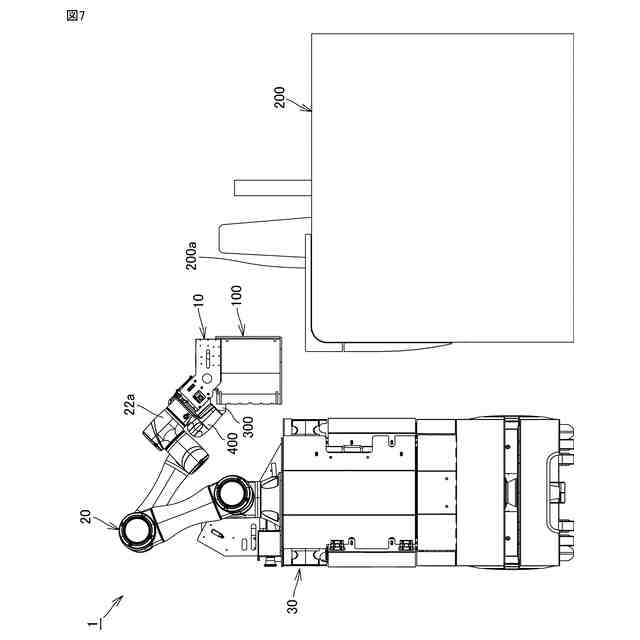
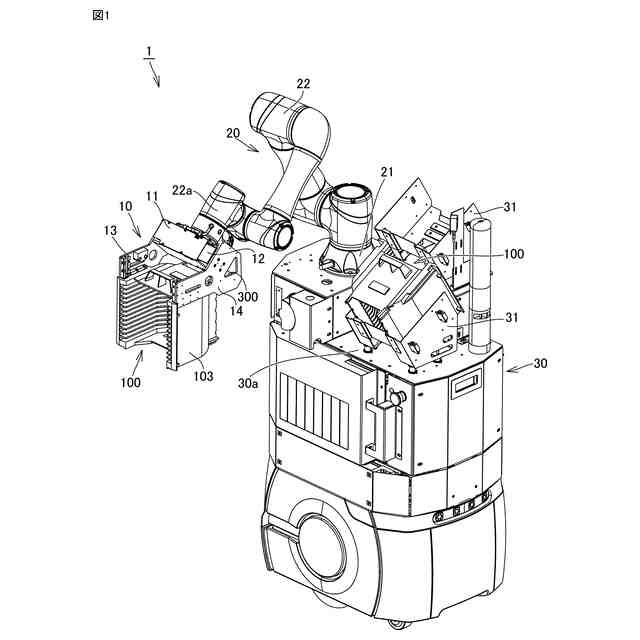
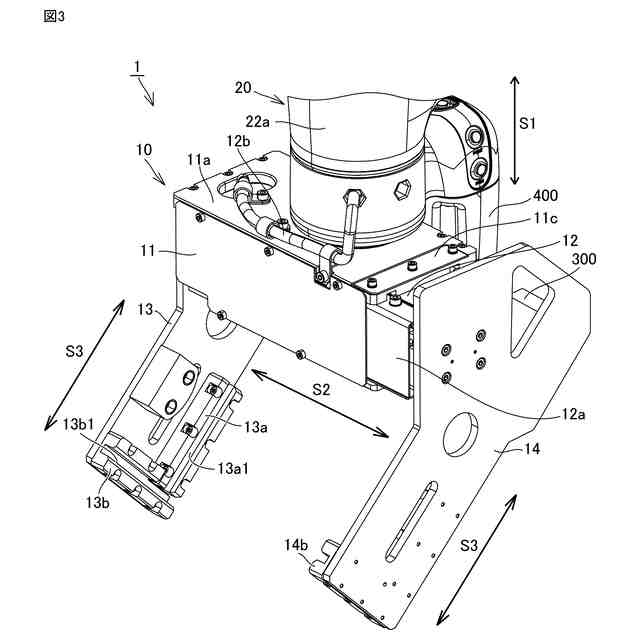
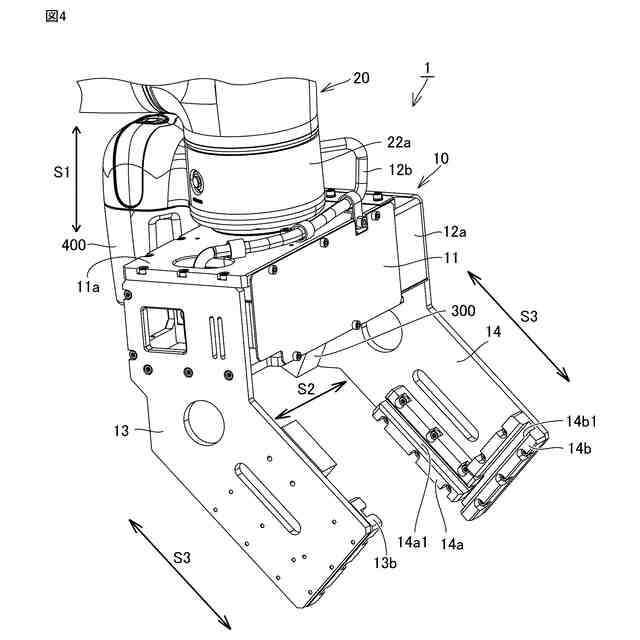
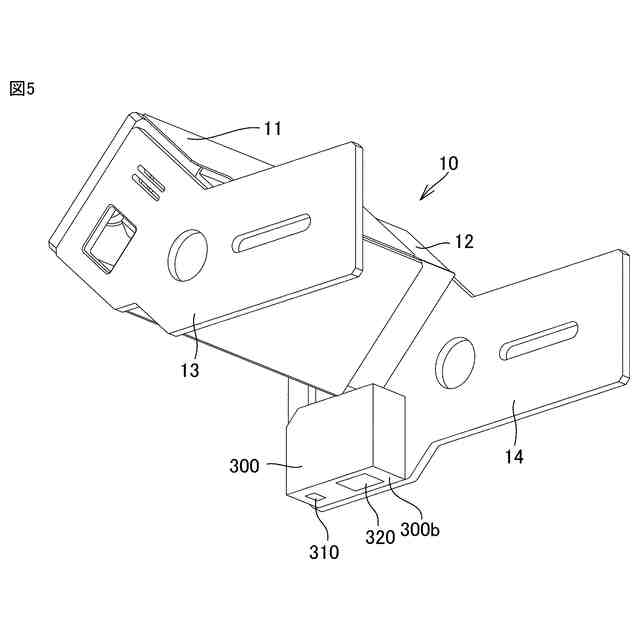
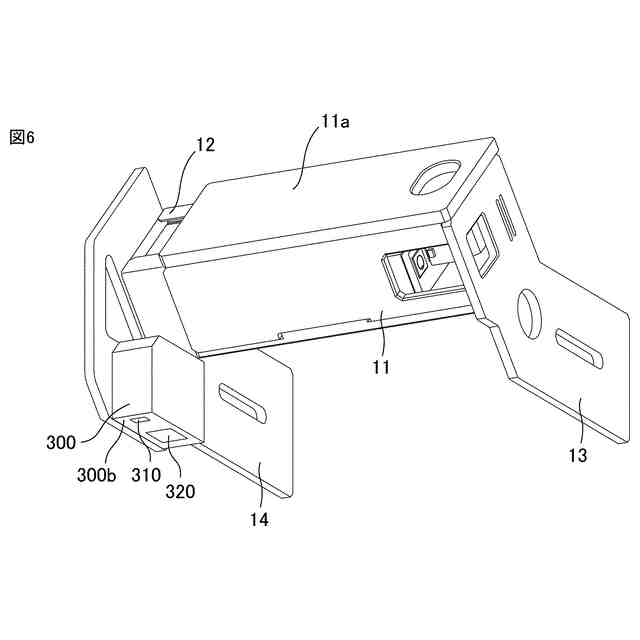
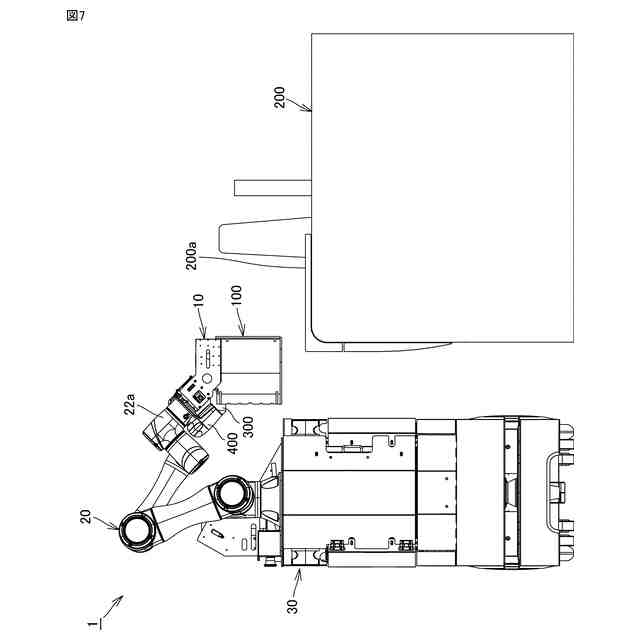
【解決手段】基板カセット100を、外部に設けられたワーク載置台200aに移載する基板カセット移載装置1であって、基板カセット100を把持可能なエンドエフェクタ10と、エンドエフェクタ10が取付けられたロボットアーム20と、ロボットアーム20が取付けられた無人走行部30と、エンドエフェクタ10によって把持された基板カセット100のワーク載置台200aまでの距離を測定する距離計測装置300と、を備える。
【選択図】図7
特許請求の範囲
【請求項1】
基板カセットを、外部に設けられたワーク載置台に移載する基板カセット移載装置であって、
前記基板カセットを把持可能なエンドエフェクタと、
前記エンドエフェクタが取付けられたロボットアームと、
前記ロボットアームが取付けられた無人走行部と、
前記エンドエフェクタによって把持された前記基板カセットの前記ワーク載置台までの距離を測定する距離計測装置と、
を備える、基板カセット移載装置。
続きを表示(約 370 文字)
【請求項2】
前記距離計測装置は、前記エンドエフェクタに取り付けられている、
請求項1に記載の基板カセット移載装置。
【請求項3】
前記ロボットアームは、前記エンドエフェクタが取付けられた部分に第1方向に沿って延在する主軸を有し、
前記エンドエフェクタは、前記第1方向と交差する第2方向において対向配置されるとともに、当該第2方向に沿って相対的に移動可能に構成された第1アーム部および第2アーム部を有し、
前記距離計測装置は、前記第2アーム部の前記第1アーム部が対向する領域に設けられている、
請求項2に記載の基板カセット移載装置。
【請求項4】
前記距離計測装置は、レーザ光を用いた装置である、
請求項1から請求項3のいずれか1項に記載の基板カセット移載装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、基板カセット移載装置に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
工場等の製造ラインにおける無人化を実現すべく、基板カセットの移載等を自動で行なう基板カセット移載装置が普及しつつある。このような基板カセット移載装置としては、無人走行部と、これに積載されたロボットアームと、ロボットアームの先端に取り付けられたエンドエフェクタとを備えたものが知られている。
【0003】
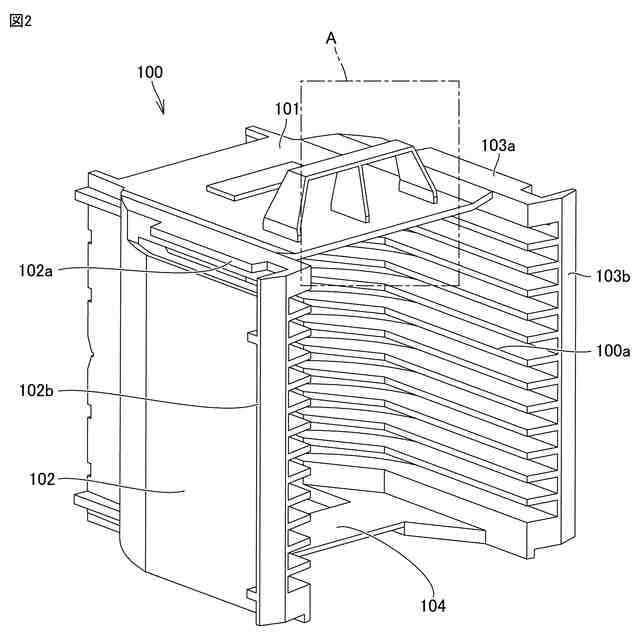
半導体の製造ラインにおいて半導体ウエハを移載する際には、これを複数収納可能に構成された基板カセットが用いられる。このような基板カセットを把持することが可能に構成されたエンドエフェクタとして、たとえば意匠登録第1694299号公報(特許文献1)および意匠登録第1694365号公報(特許文献2)には、対向配置された一対のアーム部の各々の内側に1つずつ設けられた保持部に保持溝が形成されることにより、基板カセットの周縁に設けられた突条部を把持することが可能に構成されたものが開示されている。
【先行技術文献】
【特許文献】
【0004】
意匠登録第1694299号公報
意匠登録第1694365号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
一般に、半導体の製造は、様々な半導体製造工程に分類され、個々の製造工程に対応したワーク加工装置、ワーク検査装置、その他のワーク載置装置が複数台設置され、これらのワーク載置装置に対して、順次、基板カセット移載装置によって基板カセットが搬送および載置される。
【0006】
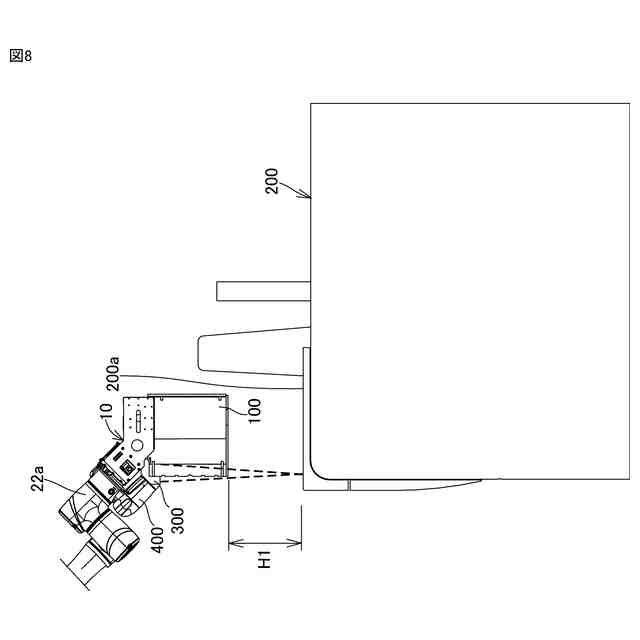
複数のワーク載置装置は、所定の水平基準を有する工場内の床面等に載置されるものの、ワーク載置装置の個体差により、基板カセットを載置する高さ位置は、微少に異なる。たとえば、基準面より1mm低い場合には、基板カセットは、載置面から1mm高い位置で、基板カセット移載装置から離されるため、落下することとなる。基準面より1mm高いには、基板カセットは、載置面に衝突することとなる。
【0007】
その結果、基板カセットに収納された半導体ウエハに衝撃を与え、半導体ウエハが損傷するおそれがある。
【0008】
したがって、本開示の目的とするところは、基板カセットの載置面の高さ位置を測定することができる機能を備える基板カセット移載装置を提供することにある。
【課題を解決するための手段】
【0009】
本開示に従ったある態様に係る基板カセット移載装置は、基板カセットを、外部に設けられたワーク載置台に移載する基板カセット移載装置であって、上記基板カセットを把持可能なエンドエフェクタと、上記エンドエフェクタが取付けられたロボットアームと、上記ロボットアームが取付けられた無人走行部と、上記エンドエフェクタによって把持された上記基板カセットの上記ワーク載置台までの距離を測定する距離計測装置と、を備える。
【0010】
このように、距離計測装置を備えることで、基板カセットをワーク載置台に載置する場合の、個々のワーク載置台の高さ位置を把握した状態で基板カセットをワーク載置台に載置することができる。その結果、基板カセットに衝撃を与えること無く、基板カセットをワーク載置台に載置することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
オムロン株式会社
椅子
7日前
オムロン株式会社
ドライバ
13日前
オムロン株式会社
電磁継電器
今日
オムロン株式会社
電磁継電器
今日
オムロン株式会社
電磁継電器
今日
オムロン株式会社
トリガスイッチ
今日
オムロン株式会社
制御システム、設計装置、および設計プログラム
6日前
オムロン株式会社
制御装置、学習済みモデル生成装置、方法、及びプログラム
今日
オムロン株式会社
環境地図を生成するための方法、システム、及び移動ロボット
今日
オムロン株式会社
予測システム、アグリゲーションシステム、方法およびプログラム
今日
株式会社エビス
連結具
2か月前
川崎重工業株式会社
ロボット
2か月前
株式会社マキタ
電動工具
7日前
株式会社マキタ
電動工具
2か月前
株式会社マキタ
打撃工具
2か月前
川崎重工業株式会社
ロボット
1か月前
川崎重工業株式会社
ロボットアーム
7日前
株式会社マキタ
ハンマドリル
2か月前
日本車輌製造株式会社
締め付け工具
7日前
川崎重工業株式会社
ロボットアーム
7日前
川崎重工業株式会社
ロボット
2か月前
川崎重工業株式会社
ロボットリスト
7日前
川崎重工業株式会社
ロボットシステム
7日前
CKD株式会社
吸着型搬送装置
21日前
株式会社アイエイアイ
グリッパー
2か月前
株式会社安川電機
ロボット
24日前
株式会社安川電機
ロボット
24日前
長堀工業株式会社
締結装置
1か月前
株式会社安川電機
ロボット
24日前
ジヤトコ株式会社
圧入装置
20日前
川崎重工業株式会社
塗装ロボット
28日前
株式会社山下工業研究所
ラチェットレンチ
2か月前
株式会社不二越
ロボットの操作装置
2か月前
株式会社アマダ
磁気吸着装置
27日前
工機ホールディングス株式会社
作業機
27日前
株式会社不二越
協働ロボットシステム
2か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ