TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024176217
公報種別
公開特許公報(A)
公開日
2024-12-19
出願番号
2023094601
出願日
2023-06-08
発明の名称
手首関節ユニットおよびそれを備えた作業装置
出願人
NTN株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
B25J
17/02 20060101AFI20241212BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】小型化および軽量化を図ることができる手首関節ユニットおよびそれを備えた作業装置を提供する。
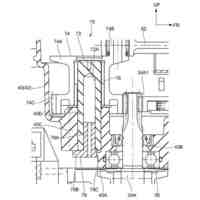
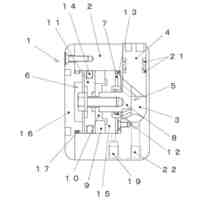
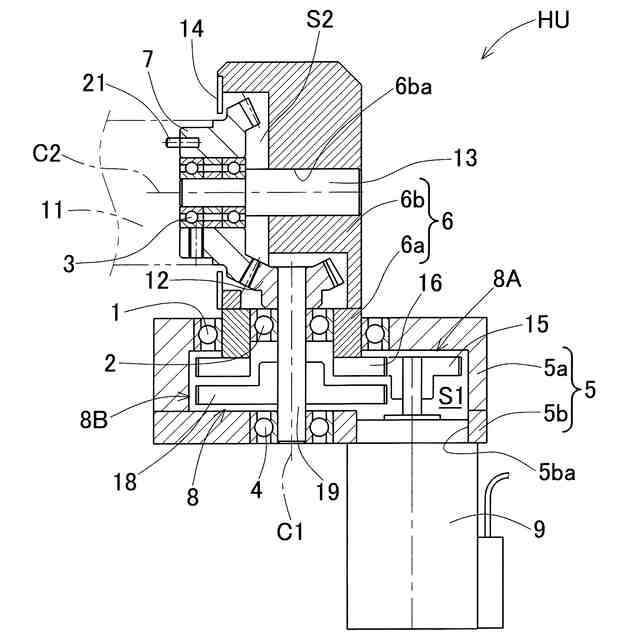
【解決手段】手首関節ユニットHUは、アーム5と、第1回転軸C1回りに回転可能に設けられる第1の回転部材6と、第1回転軸C1と直交する第2回転軸C2回りに回転可能に設けられる第2の回転部材である傘歯車7と、アーム5に支持され第1の回転部材6を回転駆動する第1モータ9と、アーム5に支持され傘歯車7を回転駆動する第2モータとを備える。第1の回転部材6はアーム5に片持ち支持され、第2の回転部材である傘歯車7は、第1の回転部材6に片持ち支持される。前記傘歯車7には、エンドエフェクタ11が取付け可能である。
【選択図】図1
特許請求の範囲
【請求項1】
アームと、
前記アームに片持ち支持され、第1回転軸回りに回転可能に設けられる第1の回転部材と、
前記第1の回転部材に片持ち支持され、第1回転軸と直交する第2回転軸回りに回転可能に設けられる第2の回転部材である傘歯車と、
前記アームに支持され前記第1の回転部材を回転駆動する第1モータと、
前記アームに支持され前記傘歯車を回転駆動する第2モータと、を備え、
前記傘歯車は、エンドエフェクタが取付け可能な手首関節ユニット。
続きを表示(約 930 文字)
【請求項2】
請求項1に記載の手首関節ユニットにおいて、前記傘歯車と噛合う傘歯車と、この傘歯車が固定され、且つ前記アームおよび前記第1の回転部材に対して軸受(2,4)を介して回転支持される歯車軸と、をさらに備え、
前記アームに対して前記第1の回転部材が軸受(1)を介して回転支持され、この軸受(1)と、前記アームに対して前記歯車軸を回転支持する軸受(4)とが同軸に設けられている手首関節ユニット。
【請求項3】
請求項1または請求項2に記載の手首関節ユニットにおいて、前記第2の回転部材である傘歯車のボス外径Dは、常用するはめあいの軸で用いる寸法許容差における公差域クラスがh7以下またはg6以下であり、且つ前記ボス外径Dは、軸受(3)を嵌合する前記傘歯車のボス内径dに対する同軸度が0.03mm以下である手首関節ユニット。
【請求項4】
請求項1または請求項2に記載の手首関節ユニットにおいて、前記第2の回転部材である傘歯車のボス端面は、軸受(3)を嵌合する前記傘歯車のボス内径dに対する直角度が0.05mm以下である手首関節ユニット。
【請求項5】
請求項1または請求項2に記載の手首関節ユニットにおいて、前記第2の回転部材である傘歯車のボス側面および端面には、前記エンドエフェクタを取付けるためのねじ孔が設けられている手首関節ユニット。
【請求項6】
請求項1または請求項2に記載の手首関節ユニットにおいて、前記第2の回転部材である傘歯車のボス端面には、前記エンドエフェクタの取付け再現性と、回転方向のずれ防止を図るピンを設置可能な取付け孔が設けられている手首関節ユニット。
【請求項7】
請求項1または請求項2に記載の手首関節ユニットにおいて、前記第2の回転部材である傘歯車のボス外径Dには、前記エンドエフェクタにおける第2回転軸方向の取付け位置を規制する肩が設けられ、前記肩の隅の半径Rが0.2mm以下、または前記肩の隅にぬすみが設けられている手首関節ユニット。
【請求項8】
請求項1または請求項2に記載の手首関節ユニットを備えた作業装置。
発明の詳細な説明
【技術分野】
【0001】
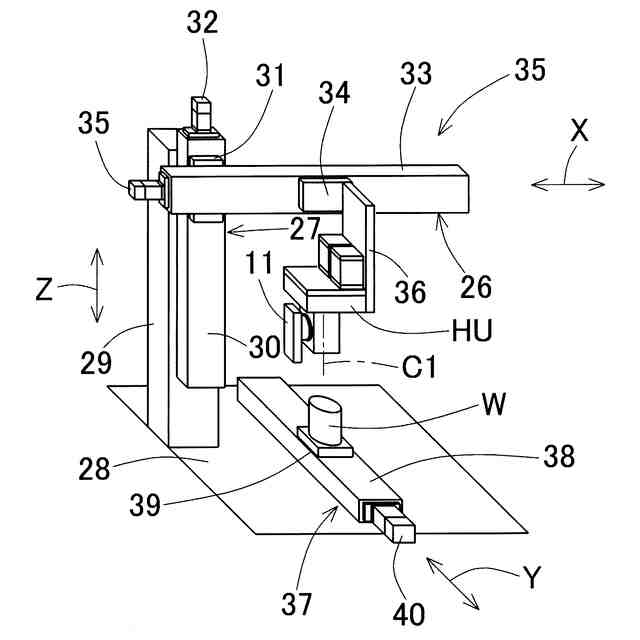
本発明は、手首関節ユニットおよびそれを備えた作業装置に関し、例えば、スカラーロボット、直交ロボット、垂直多関節ロボット等に適用される技術に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
ロボットのアームの先端部には、手首関節ユニットが回転可能に連結されている。この手首関節ユニットは、互いに直交する2軸の回転軸を有し、一方の軸のまわりに回転する第1部材と、他方の軸のまわりに回転するように、第1部材に連結された第2部材とを備える。第2部材には、所定の作業が行えるようにエンドエフェクタが設置されている。
手首関節ユニットは、ロボットのアーム先端部に備えられることから、軽量であることが好ましく、また手首関節ユニットに設置されたエンドエフェクタで所定の作業を行うことから、周囲との干渉を避けるため小型であることが好ましい。
【0003】
特許文献1には、手首ユニットが開示されている。この手首ユニットでは、2つの駆動モータを有し、これら駆動モータと、これら駆動モータによって揺動および回転可能に設けられた手首との間に複数段のプーリ・ベルト機構を設置し、波動歯車減速機等の減速機を使用せずに必要な減速比を確保することで、大型化と高コスト化を回避できるとしている。
【0004】
特許文献2には、垂直多関節ロボットが開示されている。この垂直多関節ロボットでは、AアームにBアームが回動可能に片持ち支持されている。前記Aアームを駆動する減速機には貫通孔が設けられ、前記Bアームを駆動する伝達機構が、前記貫通孔を挿通することにより、小型化、軽量化を図れるとしている。
【先行技術文献】
【特許文献】
【0005】
特開2017-226028号公報
特許第7009929号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1に記載の手首ユニットでは、揺動中心軸が両端で支持されているため、手首の幅が大きくなり、所定の作業を行っているときに、手首部が周辺と干渉する恐れがある。また、構造上、回動範囲が制限される。
【0007】
特許文献2に記載の垂直多関節ロボットでは、先端側のアームが片持ち支持されていることから、一定の小型化は実現できているが、減速機等が回動部に搭載されているため、これ以上の小型化、軽量化には限界がある。
【0008】
本発明の目的は、小型化および軽量化を図ることができる手首関節ユニットおよびそれを備えた作業装置を提供することである。
【課題を解決するための手段】
【0009】
本発明の手首関節ユニットは、アームと、
前記アームに片持ち支持され、第1回転軸回りに回転可能に設けられる第1の回転部材と、
前記第1の回転部材に片持ち支持され、第1回転軸と直交する第2回転軸回りに回転可能に設けられる第2の回転部材である傘歯車と、
前記アームに支持され前記第1の回転部材を回転駆動する第1モータと、
前記アームに支持され前記傘歯車を回転駆動する第2モータと、を備え、
前記傘歯車には、エンドエフェクタを取付け可能である。
【0010】
この構成によると、第1の回転部材はアームに片持ち支持され、第2の回転部材である傘歯車は第1の回転部材に片持ち支持されているため、第1,第2の回転部材は、第1,第2モータおよび支持部材等に干渉することなく回転運動の自由度を高めることが可能となる。また第1,第2の回転部材が片持ち支持されているため、これら第1,第2の回転部材が両持ち支持される構造よりも小型化および軽量化を図ることができる。第1,第2モータは、回転運動する回転部材ではなく、ベースとなるアームに支持されているため、モータ本体が動くことがない。これにより軽量でコンパクトな第1,第2の回転部材を実現できる。さらに第2の回転部材である傘歯車に、エンドエフェクタが取付け可能なため、部品点数が少なく、コンパクトかつ軽量な手首関節ユニットを実現できる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
NTN株式会社
電源装置
3日前
NTN株式会社
電動オイルポンプ、および電動オイルポンプの制御方法
3日前
個人
寸切りボルト回し
4か月前
株式会社エビス
連結具
1か月前
コクヨ株式会社
補助器具
4か月前
太陽工業株式会社
チャック装置
4か月前
川崎重工業株式会社
ロボット
2か月前
株式会社マキタ
打撃工具
1か月前
オムロン株式会社
電動把持工具
4か月前
株式会社マキタ
打撃工具
2か月前
株式会社マキタ
電動工具
1か月前
株式会社ダイヘン
搬送装置
2か月前
株式会社エビス
携帯付属物取付具
2か月前
株式会社ダイヘン
搬送装置
3か月前
株式会社ダイヘン
制御装置
2か月前
株式会社マキタ
電動ハンマ
3か月前
株式会社スター精機
把持装置
4か月前
川崎重工業株式会社
ロボット
2か月前
株式会社マキタ
ハンマドリル
1か月前
SMC株式会社
グリッパ
3か月前
川崎重工業株式会社
ロボット
1か月前
川崎重工業株式会社
ロボット
1か月前
CKD株式会社
吸着型搬送装置
4日前
フジセン技工株式会社
マーキング装置
4か月前
工機ホールディングス株式会社
作業機
4か月前
株式会社近藤製作所
産業用ロボットチャック
3か月前
学校法人立命館
ロボットハンド
2か月前
日本電業工作株式会社
移動装置
4か月前
株式会社アイエイアイ
グリッパー
2か月前
川崎重工業株式会社
塗装ロボット
11日前
白山工業株式会社
遠隔操作ロボット機構
3か月前
株式会社安川電機
ロボット
7日前
トヨタ自動車株式会社
ロボットチャック
3か月前
株式会社安川電機
ロボット
7日前
株式会社安川電機
ロボット
7日前
フジセン技工株式会社
自動ねじ締め装置
4か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ