TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024165149
公報種別
公開特許公報(A)
公開日
2024-11-28
出願番号
2023081055
出願日
2023-05-16
発明の名称
ロボット制御システム、制御装置、及びプログラム
出願人
株式会社SOKEN
,
株式会社デンソー
代理人
弁理士法人太陽国際特許事務所
主分類
G08G
1/005 20060101AFI20241121BHJP(信号)
要約
【課題】災害の発生時に複数のロボットの各々に適切な災害時タスクを実行させることができるロボット制御システム、制御装置、及びプログラムを提供する。
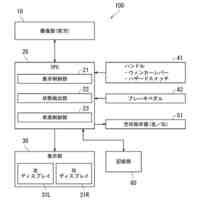
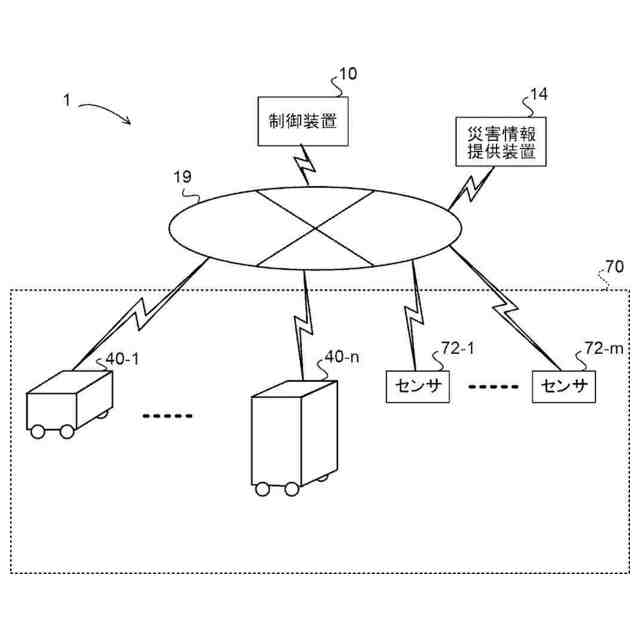
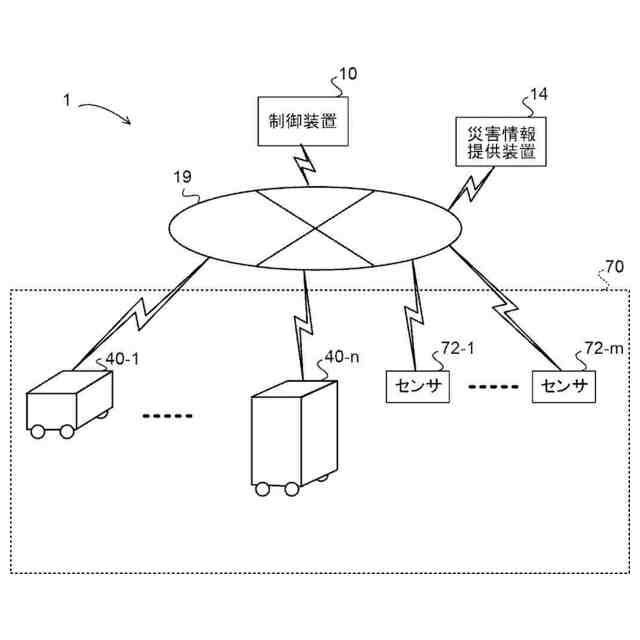
【解決手段】所定のエリア内の移動が可能であり、かつ通常時には通常時タスクを実行し、また災害時には災害時タスクの実行が可能な複数のロボット40と、少なくとも一つのプロセッサを有し、プロセッサは、災害の発生を検知した場合、所定のエリアに存在する複数のロボット40各々の現在位置を特定し、特定した複数のロボット40各々の現在位置と、所定のエリアの地図情報と、複数のロボット40各々の災害時タスクを表す情報と、に基づいて、複数のロボット40各々に、災害時タスクの実行、及び所定のエリア内における災害時タスクの実行場所への移動を指示する制御装置10と、を備えたロボット制御システム。
【選択図】図1
特許請求の範囲
【請求項1】
所定のエリア(70)内の移動が可能であり、かつ通常時には通常時タスクを実行し、また災害時には災害時タスクの実行が可能な複数のロボット(40)と、
少なくとも一つのプロセッサ(20)を有し、
前記プロセッサは、
災害の発生を検知した場合、前記所定のエリアに存在する前記複数のロボット各々の現在位置を特定し、
特定した前記複数のロボット各々の現在位置と、前記所定のエリアの地図情報(26A)と、前記複数のロボット各々の前記災害時タスクを表す情報(26B)と、に基づいて、前記複数のロボット各々に、前記災害時タスクの実行、及び前記所定のエリア内における前記災害時タスクの実行場所への移動を含む災害時動作を指示する制御装置(10)と、
を備えたロボット制御システム(1)。
続きを表示(約 1,200 文字)
【請求項2】
前記プロセッサは、
前記所定のエリア内の災害状況を検知するセンサ(72)から前記災害状況に関する災害状況情報を取得し、
前記災害状況情報にさらに基づいて、前記複数のロボット各々に、前記災害時動作を指示する
請求項1に記載のロボット制御システム。
【請求項3】
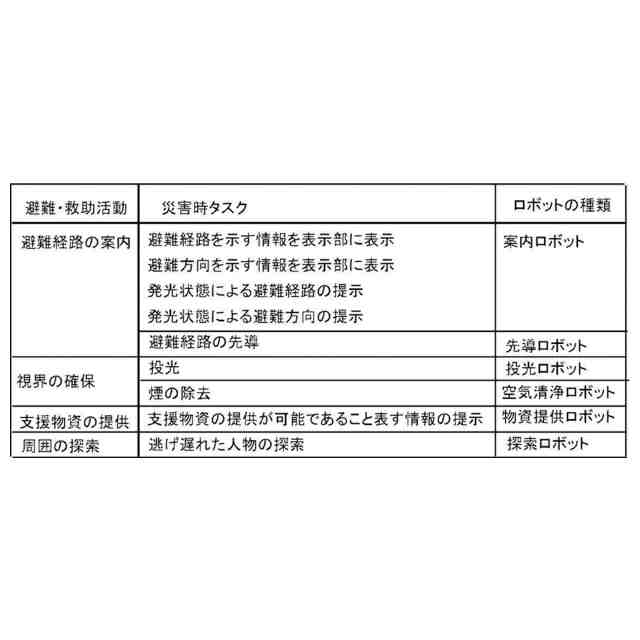
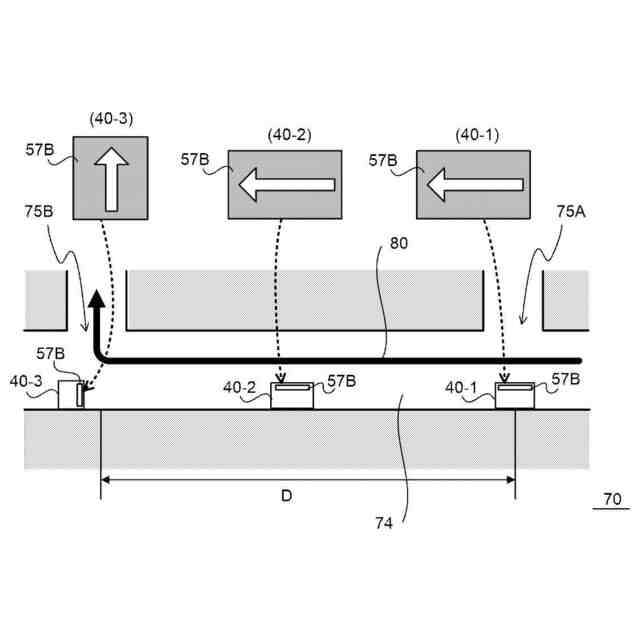
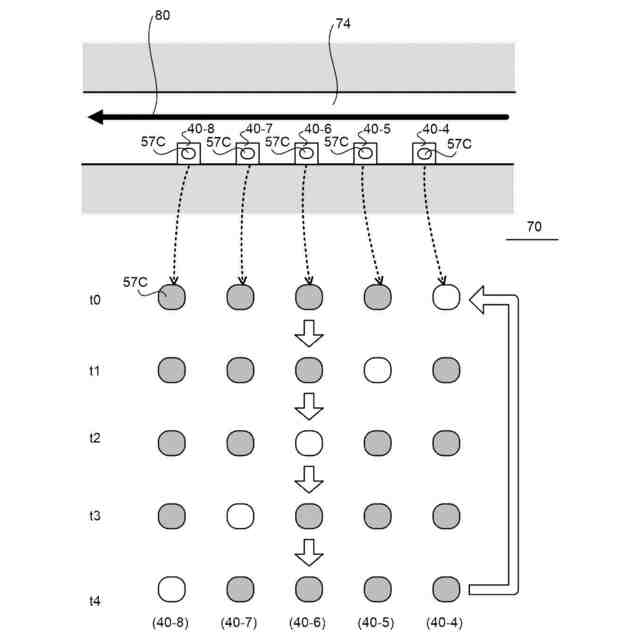
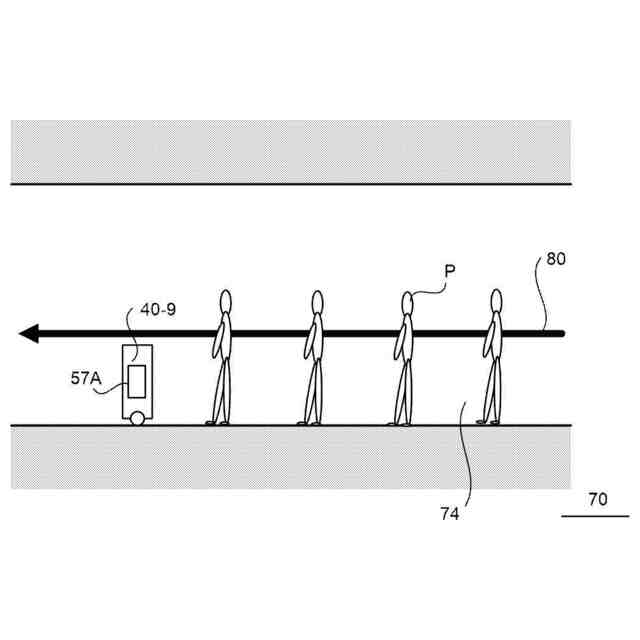
前記複数のロボットは、前記災害時タスクが避難経路(80)の案内である案内ロボット(40-1~40-9)を含み、
前記プロセッサは、前記案内ロボットに、前記災害時タスクの実行として前記地図情報から特定される前記避難経路の案内の実行を指示し、前記災害時タスクの実行場所として前記避難経路の案内場所を指示する
請求項2に記載のロボット制御システム。
【請求項4】
前記案内ロボットは表示部(57B)を備え、
前記プロセッサは、前記避難経路の案内の実行として、前記表示部に避難経路を示す情報、及び避難方向を表す情報の少なくとも一方の表示を行わせる
請求項3に記載のロボット制御システム。
【請求項5】
前記案内ロボットは発光部(57C)を備え、
前記プロセッサは、前記避難経路の案内の実行として、前記発光部の発光状態により、避難経路、及び避難方向の少なくとも一方を提示させる
請求項3に記載のロボット制御システム。
【請求項6】
前記プロセッサは、
前記災害状況情報として、避難する人物による人流を表す情報を取得し、
前記避難経路として、前記地図情報から前記人流が多い方向を避難方向とした避難経路を特定する
請求項3に記載のロボット制御システム。
【請求項7】
前記プロセッサは、前記避難経路の案内の実行として、避難経路を移動する人物の先導を行わせる
請求項3に記載のロボット制御システム。
【請求項8】
前記複数のロボットは、投光器(53)を有し、前記災害時タスクが投光である投光ロボット(40-10)を含み、
前記プロセッサは、前記投光ロボットに、前記災害時タスクの実行として投光の実行を指示する
請求項2に記載のロボット制御システム。
【請求項9】
前記プロセッサは、前記投光の実行として、天井に向けた投光の実行を指示する
請求項8に記載のロボット制御システム。
【請求項10】
前記複数のロボットは、空気清浄機を有し、前記災害時タスクが空気の清浄である空気清浄ロボットを含み、
前記プロセッサは、前記空気清浄ロボットに、前記災害時タスクの実行として煙を含む空気の清浄の実行を指示し、災害時タスクの実行場所として、前記地図情報から特定される避難経路を指示する
請求項2に記載のロボット制御システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボット制御システム、制御装置、及びプログラムに関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
従来、日常的に使用するロボットに災害現場でも活動できる機能を持たせる技術が知られている。例えば、特許文献1には、複数のロボットを強調して行動させる制御手段が、災害時以外の平常時の活動に対応した行動を制御する平常時行動制御機能と、災害発生時の救済支援活動に対応した行動を制御する災害行動制御機能と、を有する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2019-209425号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、日常的に、異なるタスクを実行する様々なロボットが所定のエリア内で使用されている。このような様々なロボットは、災害時に実行することが可能な災害時タスクが異なる場合がある。しかしながら、特許文献1に記載の技術では、複数のロボットの各々が災害時に実行することが可能な災害時タスクが異なる場合については考慮されていなかった。そのため、特許文献1に記載の技術では、災害の発生時に複数のロボットの各々に適切な災害時タスクを実行させるには十分ではないという問題があった。
【0005】
本開示は、上記事情を考慮して成されたもので、災害の発生時に複数のロボットの各々に適切な災害時タスクを実行させることができるロボット制御システム、制御装置、及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するために本開示のロボット制御システムは、所定のエリア(70)内の移動が可能であり、かつ通常時には通常時タスクを実行し、また災害時には災害時タスクの実行が可能な複数のロボット(40)と、少なくとも一つのプロセッサ(20)を有し、前記プロセッサは、災害の発生を検知した場合、前記所定のエリアに存在する前記複数のロボット各々の現在位置を特定し、特定した前記複数のロボット各々の現在位置と、前記所定のエリアの地図情報と、前記複数のロボット各々の前記災害時タスクを表す情報と、に基づいて、前記複数のロボット各々に、前記災害時タスクの実行、及び前記所定のエリア内における前記災害時タスクの実行場所への移動を含む災害時動作を指示する制御装置(10)と、を備えたロボット制御システム(1)。
【0007】
また、本開示の制御装置は、所定のエリア内の移動が可能な複数のロボットであり、かつ通常時には通常時タスクを実行し、また災害時には災害時タスクの実行が可能な複数のロボットの各々が実行するタスクの制御が可能な制御装置であって、少なくとも一つのプロセッサを備え、前記プロセッサは、災害の発生を検知した場合、前記所定のエリアに存在する前記複数のロボット各々の現在位置を特定し、特定した前記複数のロボット各々の現在位置と、前記所定のエリアの地図情報と、前記複数のロボット各々の前記災害時タスクを表す情報と、に基づいて、前記複数のロボット各々に、前記災害時タスクの実行、及び前記所定のエリア内における前記災害時タスクの実行場所への移動を含む災害時動作を指示する。
【0008】
また、本開示のプログラムは、所定のエリア内の走行が可能な複数のロボットであり、かつ通常時には通常時タスクを実行し、また災害時には災害時タスクを実行する前記複数のロボットの各々が実行するタスクの制御が可能な制御装置が備える少なくとも一つのプロセッサに、災害の発生を検知した場合、前記所定のエリアに存在する前記複数のロボット各々の現在位置を特定し、特定した前記複数のロボット各々の現在位置と、前記所定のエリアの地図情報と、前記複数のロボット各々の前記災害時タスクを表す情報と、に基づいて、前記複数のロボット各々に、前記災害時タスクの実行、及び前記所定のエリア内における前記災害時タスクの実行場所への移動を含む災害時動作を指示することを含む処理を実行させるためのものである。
【発明の効果】
【0009】
本開示によれば、災災害の発生時に複数のロボットの各々に適切な災害時タスクを実行させることができる。
【図面の簡単な説明】
【0010】
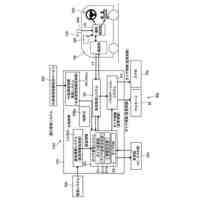
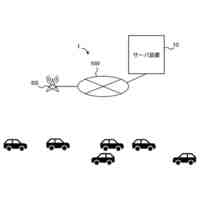
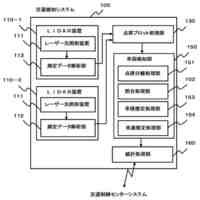
実施形態のロボット制御システムの構成の一例を表す構成図である。
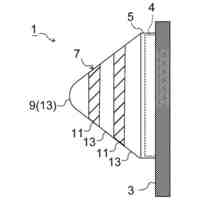
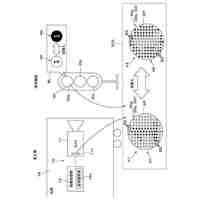
ロボットが実行する災害時タスクの例について説明するための図である。
災害時タスクの実行例を説明するために、エリアの通路を上から見た模式図である。
災害時タスクの実行例を説明するために、エリアの通路を上から見た模式図である。
災害時タスクの実行例を説明するために、エリアの通路を横から見た模式図である。
災害時タスクの実行例を説明するために、エリアの通路を横から見た模式図である。
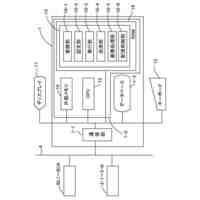
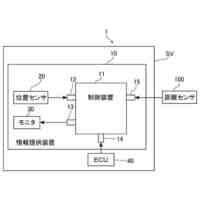
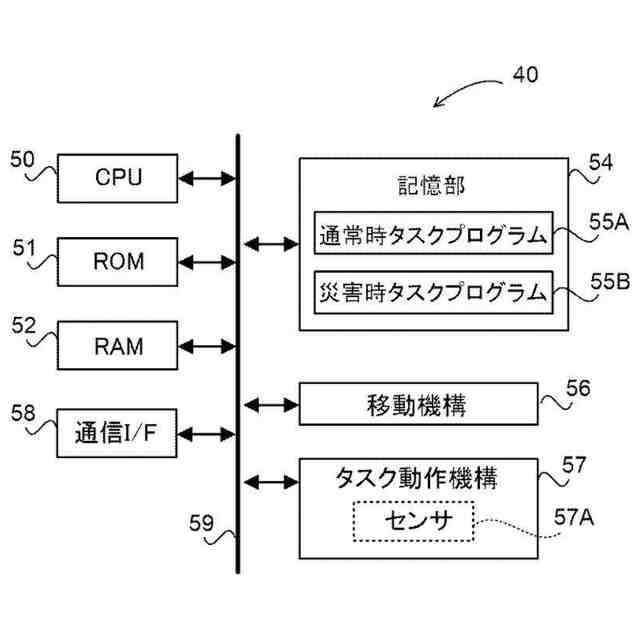
実施形態のロボットのハードウエア構成の一例を表した構成図である。
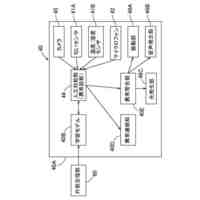
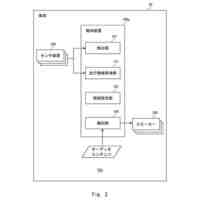
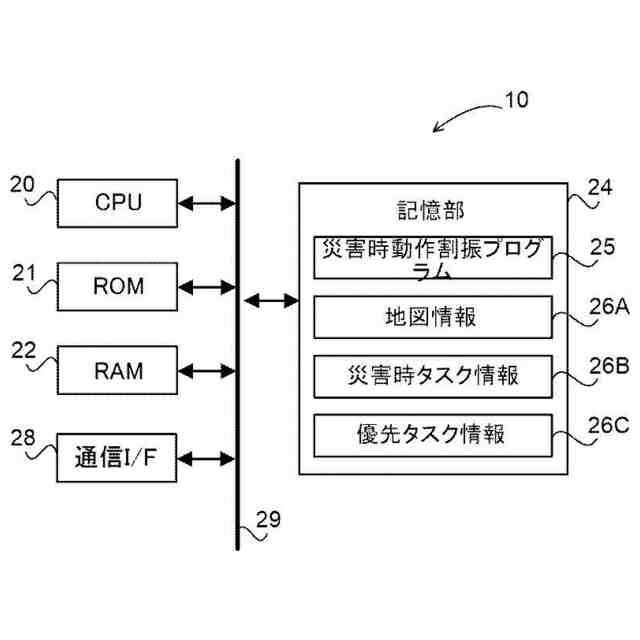
実施形態の制御装置のハードウエア構成の一例を表した構成図である。
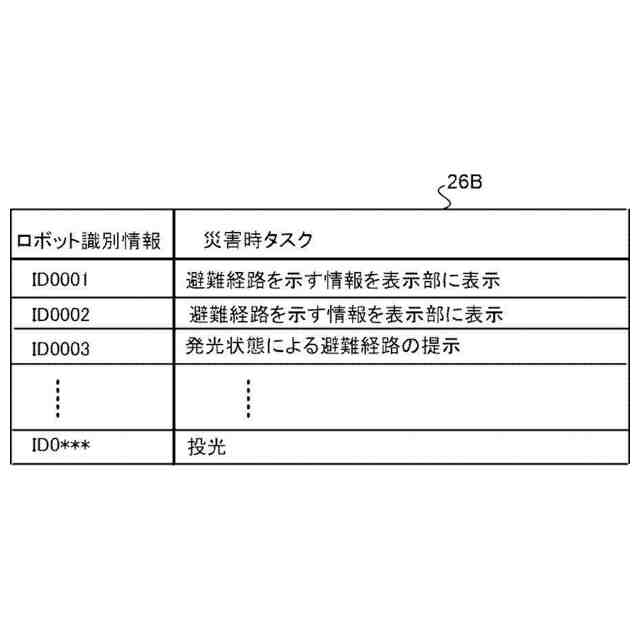
災害時タスク情報の一例を示す図である。
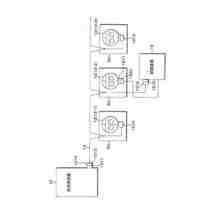
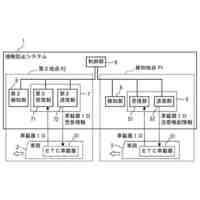
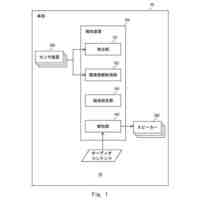
実施形態の制御装置の構成の一例を示す機能ブロック図である。
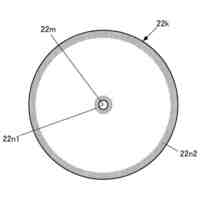
実施形態の避難経路特定部による避難経路の特定方法を説明するための図である。
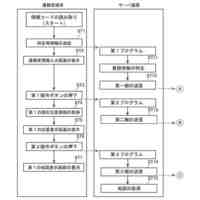
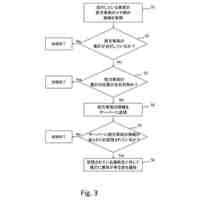
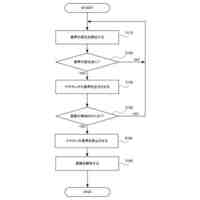
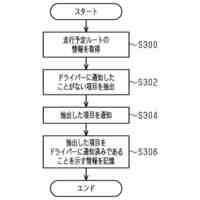
実施形態の制御装置において実行される災害時動作割振処理の流れの一例を表すフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
自動運転車
1か月前
ニッタン株式会社
煙感知器
2か月前
個人
迷子支援システム
1か月前
個人
万引き防止システム
16日前
株式会社ニカデン
検出装置
1か月前
株式会社サンライン
発炎筒携行容器
1か月前
ABT合同会社
詐欺防止装置
16日前
能美防災株式会社
表示灯カバー
2か月前
株式会社あおい興産
避難誘導灯
1か月前
株式会社国際電気
防災システム
25日前
ニッタン株式会社
発信機
1か月前
ニッタン株式会社
発信機
1か月前
能美防災株式会社
非常放送システム
2か月前
京セラ株式会社
案内システム及び案内方法
3か月前
日本信号株式会社
運行管理システム
9日前
日本無線株式会社
人物探索システム
3か月前
京セラ株式会社
制御装置
1か月前
ホーチキ株式会社
防災システム
16日前
トヨタ自動車株式会社
運転支援システム
2か月前
株式会社SUBARU
危険報知システム
16日前
株式会社F2Fグループ
疲労度判定方法
3か月前
シャープ株式会社
表示装置
2か月前
トヨタ自動車株式会社
運転支援装置
2か月前
株式会社豊田自動織機
運行表示装置
1か月前
戸田建設株式会社
検知システム
1か月前
日本信号株式会社
信号システム及び信号灯器
1か月前
トヨタ自動車株式会社
情報提供システム
2か月前
トヨタ自動車株式会社
渋滞検知システム
2か月前
株式会社JR西日本テクシア
接触防止システム
1か月前
株式会社創発システム研究所
交通検知システム
3か月前
株式会社小糸製作所
情報提供装置及び制御装置
16日前
トヨタ自動車株式会社
ドライブレコーダ
2か月前
株式会社JVCケンウッド
報知装置及び報知方法
1か月前
トヨタ自動車株式会社
車両の情報処理装置
13日前
株式会社JVCケンウッド
報知装置及び報知方法
1か月前
株式会社IHI
運転支援装置
2か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ