TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024150279
公報種別
公開特許公報(A)
公開日
2024-10-23
出願番号
2023063622
出願日
2023-04-10
発明の名称
移動体制御システム
出願人
トヨタ自動車株式会社
,
国立大学法人九州工業大学
代理人
弁理士法人高田・高橋国際特許事務所
主分類
G08G
1/16 20060101AFI20241016BHJP(信号)
要約
【課題】移動体の周囲のリスクを適切に評価することができる技術を提供する。
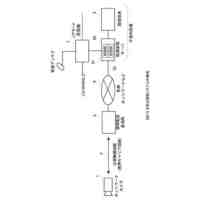
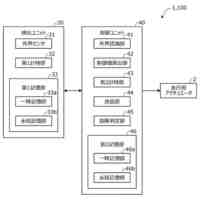
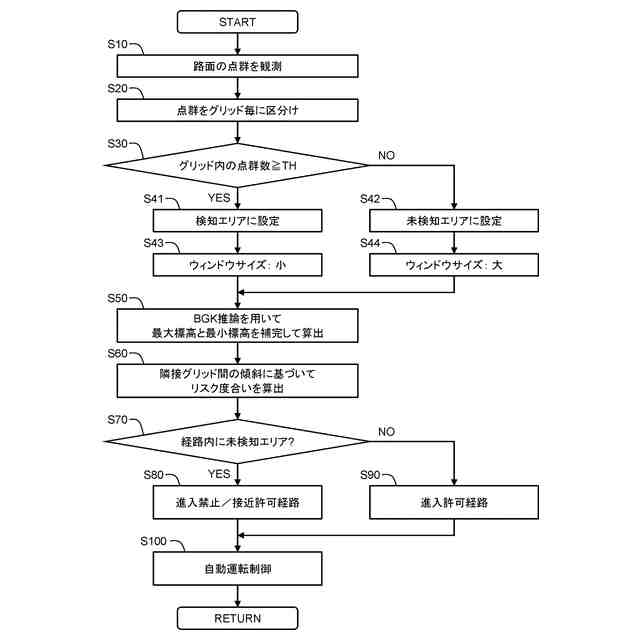
【解決手段】移動体制御システムは、移動体に搭載された外界センサによる検出結果に基づいて、複数の単位エリアに分割されたエリアの標高地図を取得する。移動体制御システムは、標高地図に基づいて、単位エリア毎に、隣接する単位エリアに対する路面の傾斜を算出する。移動体制御システムは、単位エリア毎に、傾斜に基づいてリスク度合いを算出し、リスク度合いに基づいて移動体の走行を制御する。
【選択図】図3
特許請求の範囲
【請求項1】
移動体を制御する移動体制御システムであって、
1又は複数のプロセッサを備え、
前記1又は複数のプロセッサは、
前記移動体に搭載された外界センサによる検出結果に基づいて、複数の単位エリアに分割されたエリアの標高地図を取得し、
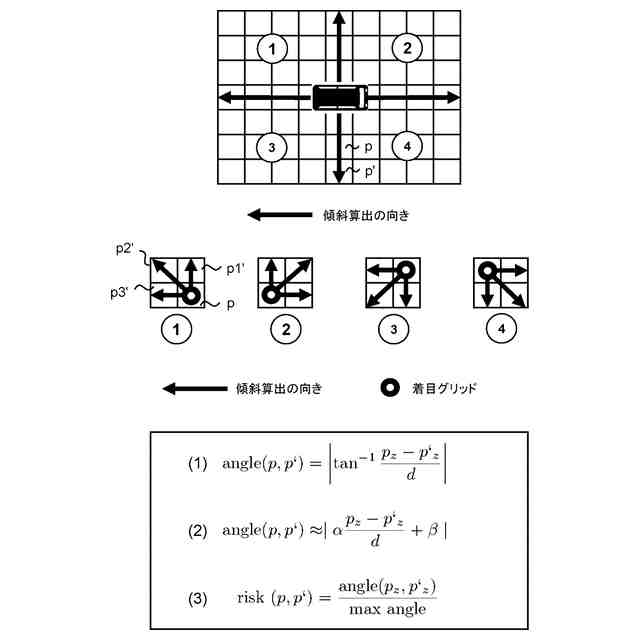
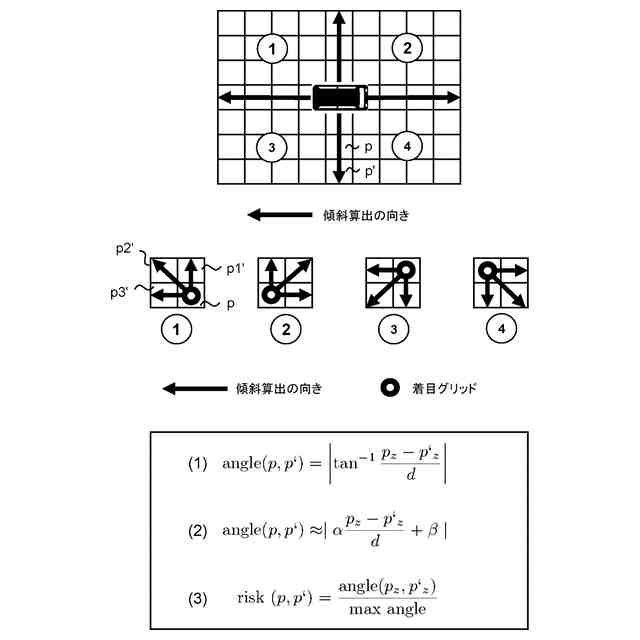
前記標高地図に基づいて、単位エリア毎に、隣接する単位エリアに対する路面の傾斜を算出し、
単位エリア毎に、前記傾斜に基づいてリスク度合いを算出し、
前記リスク度合いに基づいて、前記移動体の走行を制御する
ように構成された
移動体制御システム。
続きを表示(約 840 文字)
【請求項2】
請求項1に記載の移動体制御システムであって、
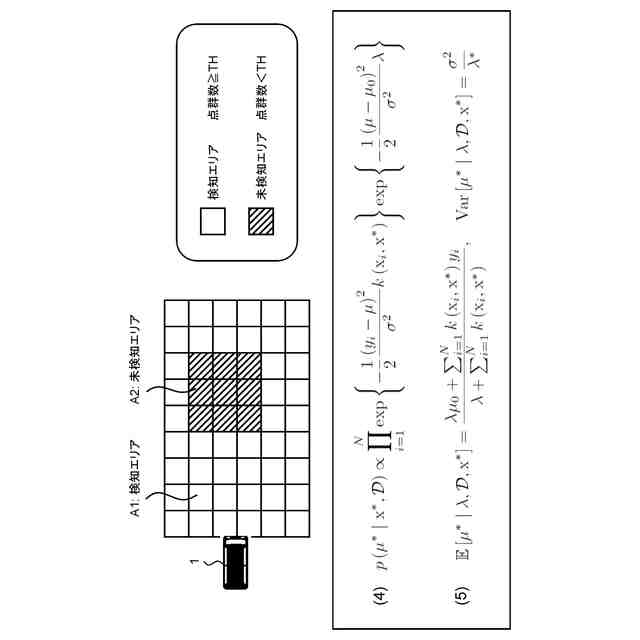
検知エリアは、前記外界センサによる検知度合いが所定レベル以上である単位エリアであり、
未検知エリアは、前記外界センサによる前記検知度合いが前記所定レベル未満である単位エリアであり、
前記1又は複数のプロセッサは、更に、
前記外界センサによる前記検出結果に基づいて、前記検知エリアにおける標高である第1標高の情報を取得し、
前記未検知エリアの周辺の前記検知エリアにおける前記第1標高に基づいて、前記未検知エリアにおける標高である第2標高を推定し、
前記検知エリアにおける前記第1標高と前記未検知エリアにおける前記第2標高を示す前記標高地図に基づいて、前記傾斜を算出する
ように構成された
移動体制御システム。
【請求項3】
請求項2に記載の移動体制御システムであって、
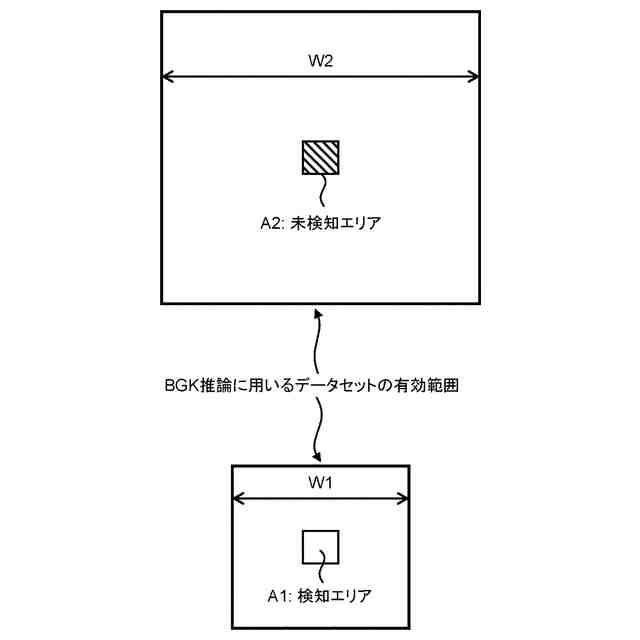
前記1又は複数のプロセッサは、更に、ベイズ一般化カーネル推論を前記未検知エリアに適用することによって、前記未検知エリアの周辺の前記検知エリアにおける前記第1標高から前記未検知エリアにおける前記第2標高を推定するように構成された
移動体制御システム。
【請求項4】
請求項3に記載の移動体制御システムであって、
前記1又は複数のプロセッサは、更に、ベイズ一般化カーネル推論を前記検知エリアにも適用することによって、前記検知エリアにおける前記第1標高を補正するように構成された
移動体制御システム。
【請求項5】
請求項4に記載の移動体制御システムであって、
前記1又は複数のプロセッサは、更に、前記検知エリアに対する前記ベイズ一般化カーネル推論のウィンドウサイズを、前記未検知エリアに対する前記ベイズ一般化カーネル推論のウィンドウサイズよりも小さく設定するように構成された
移動体制御システム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、移動体を制御する技術に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
特許文献1は、自動運転のための機械学習用教師データを収集する教師データ収集装置を開示している。教師データ収集装置は、車両に搭載したカメラによって収集される外部環境情報を取得し、ラベルを付与する。
【0003】
非特許文献1は、LIDARにより計測される点群データにベイズ一般化カーネル(Bayesian Generalized Kernel: BGK)推論を適用することによって標高を推定する技術を開示している。
【先行技術文献】
【特許文献】
【0004】
国際公開第2019/116423号
【非特許文献】
【0005】
T. Shan, J. Wang, B. Englot, and K. Doherty, “Bayesian Generalized Kernel Inference for Terrain Traversability Mapping,” in Conference on Robot Learning, pp. 829-838, PMLR, 2018.
【発明の概要】
【発明が解決しようとする課題】
【0006】
移動体に搭載される外界センサは、移動体の走行制御に利用される。例えば、外界センサによる検出結果に基づいて移動体の周囲のリスクが認識される。そして、認識されたリスクに基づいて、走行可能性(traversability)が推定される。あるいは、認識されたリスクに基づいて、移動体の目標経路が決定される。移動体の走行制御の精度を向上させるためには、移動体の周囲のリスクを適切に評価することが必要である。
【0007】
本開示の1つの目的は、移動体の周囲のリスクを適切に評価することができる技術を提供することにある。
【課題を解決するための手段】
【0008】
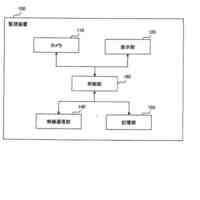
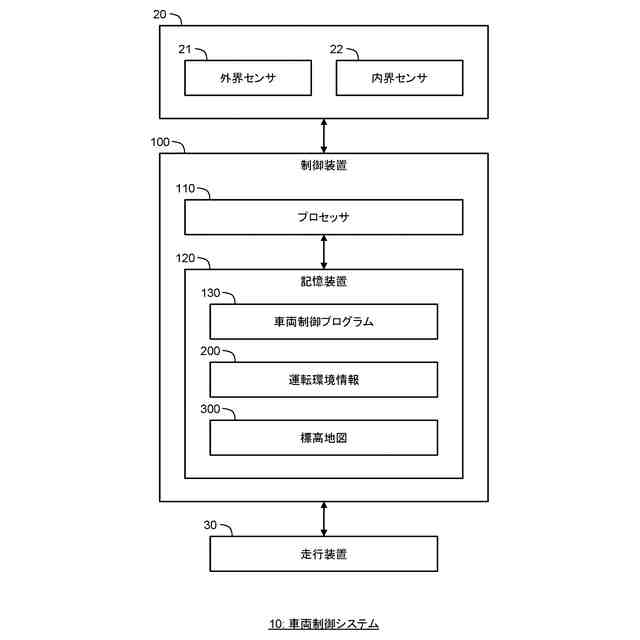
本開示の第1の観点は、移動体を制御する移動体制御システムに関する。
移動体制御システムは、1又は複数のプロセッサを備える。
1又は複数のプロセッサは、
移動体に搭載された外界センサによる検出結果に基づいて、複数の単位エリアに分割されたエリアの標高地図を取得し、
標高地図に基づいて、単位エリア毎に、隣接する単位エリアに対する路面の傾斜を算出し、
単位エリア毎に、傾斜に基づいてリスク度合いを算出し、
リスク度合いに基づいて、移動体の走行を制御する
ように構成される。
【0009】
本開示の第2の観点は、第1の観点において、更に次の特徴を有する。
検知エリアは、外界センサによる検知度合いが所定レベル以上である単位エリアである。
未検知エリアは、外界センサによる検知度合いが所定レベル未満である単位エリアである。
1又は複数のプロセッサは、更に、
外界センサによる検出結果に基づいて、検知エリアにおける標高である第1標高の情報を取得し、
未検知エリアの周辺の検知エリアにおける第1標高に基づいて、未検知エリアにおける標高である第2標高を推定し、
検知エリアにおける第1標高と未検知エリアにおける第2標高を示す標高地図に基づいて、傾斜を算出する
ように構成される。
【0010】
本開示の第3の観点は、第2の観点において、更に次の特徴を有する。
1又は複数のプロセッサは、更に、ベイズ一般化カーネル推論を未検知エリアに適用することによって、未検知エリアの周辺の検知エリアにおける第1標高から未検知エリアにおける第2標高を推定するように構成される。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
大阪瓦斯株式会社
警報装置
14日前
株式会社大林組
誘導装置
13日前
ニッタン株式会社
発信機
1か月前
ニッタン株式会社
発信機
1か月前
株式会社SUBARU
車載装置
14日前
ホーチキ株式会社
通報システム
20日前
加藤電機株式会社
車両用警報装置
1か月前
ニッタン株式会社
煙感知器
14日前
株式会社小糸製作所
転倒検知装置
20日前
能美防災株式会社
発信機
1か月前
大阪瓦斯株式会社
音声出力システム
14日前
大阪瓦斯株式会社
音声出力システム
14日前
大阪瓦斯株式会社
音声出力システム
14日前
大阪瓦斯株式会社
音声出力システム
14日前
大阪瓦斯株式会社
音声出力システム
14日前
株式会社大林組
監視システム
1か月前
株式会社ブリッツ
車両情報処理装置
16日前
綜合警備保障株式会社
警備システム
13日前
株式会社SUBARU
運転支援装置
13日前
株式会社日本製鋼所
センシング装置
21日前
ニッタン株式会社
火災感知端末
15日前
株式会社CCT
監視装置及び監視方法
9日前
トヨタ自動車株式会社
通信装置
20日前
ニッタン株式会社
感知器ベース
1か月前
ニッタン株式会社
火災感知端末
13日前
能美防災株式会社
火災感知器
1か月前
株式会社ユピテル
システムおよびプログラム等
13日前
株式会社日立国際電気
防災無線システム
24日前
トヨタ車体株式会社
運転支援装置
14日前
能美防災株式会社
防災表示盤
24日前
個人
車両制御システム
24日前
本田技研工業株式会社
車両制御装置
24日前
マツダ株式会社
興味関心度推定装置
14日前
マツダ株式会社
興味関心度推定装置
14日前
日本信号株式会社
遠隔監視システム
今日
セルスター工業株式会社
複合機能車載装置
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ