TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024145234
公報種別
公開特許公報(A)
公開日
2024-10-15
出願番号
2023057499
出願日
2023-03-31
発明の名称
作業機
出願人
工機ホールディングス株式会社
代理人
個人
,
個人
主分類
B25F
5/00 20060101AFI20241004BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】リレーの磁気が磁気センサに与える影響を抑制可能な作業機を提供する。
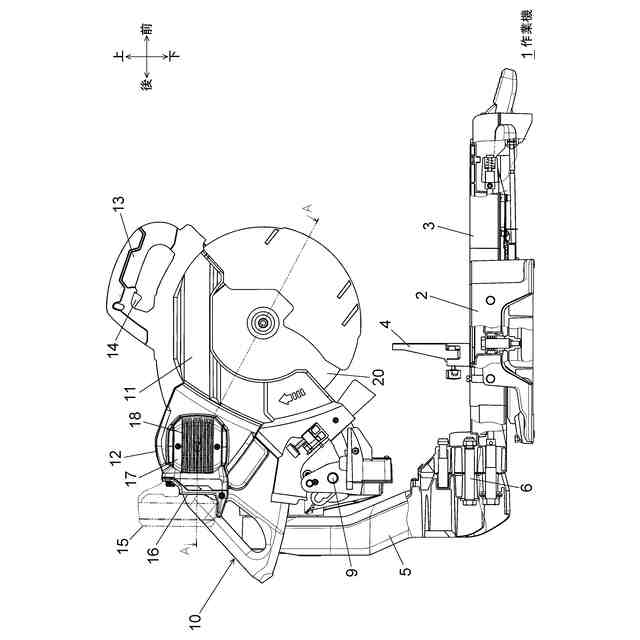
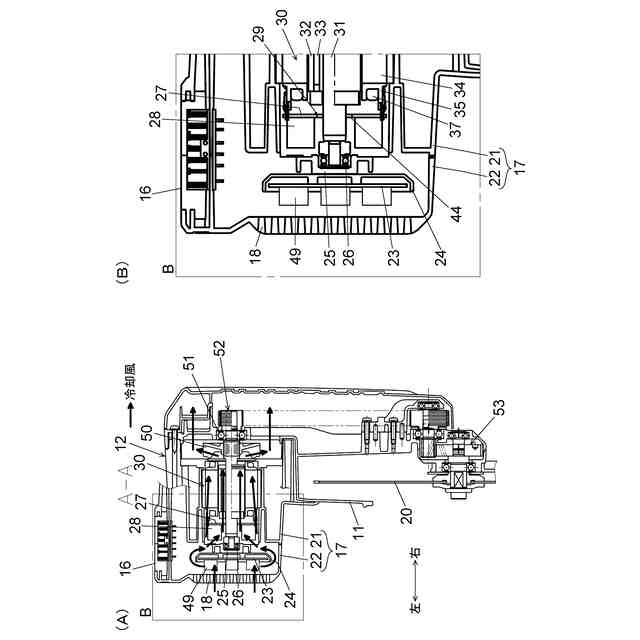
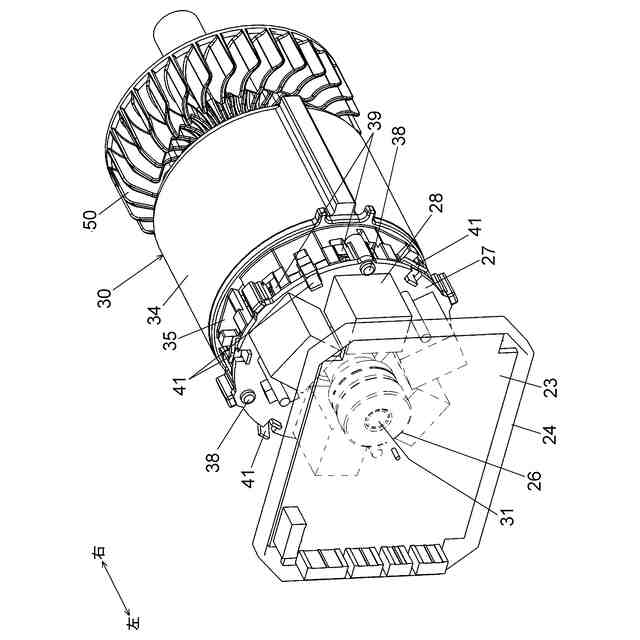
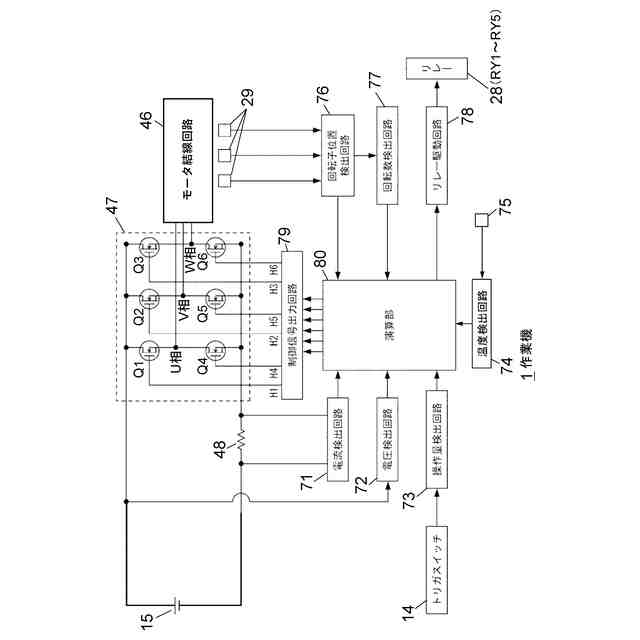
【解決手段】ステータ基板27の左面にリレー28が設けられる。ステータ基板27の右面、すなわちステータ基板27のうちリレー28が搭載された面の反対面に、ホールIC29が設けられる。ホールIC29は、モータ軸31の径方向においてリレー28より内側に位置する。リレー28の鉄芯55がステータ基板27の表面と垂直な場合、ホールIC29は、鉄芯55の軸方向視において鉄芯55の存在範囲外に位置し、かつ基板垂直方向から見てリレー28の存在範囲外に位置する。
【選択図】図12
特許請求の範囲
【請求項1】
複数のコイルを有するモータと、
前記複数のコイルの結線切替用のリレーと、
前記モータの回転検出用の磁気センサと、
前記リレー及び前記磁気センサを搭載した基板と、を有し、
前記磁気センサは、前記リレーの有する磁性体芯の軸方向視において、前記磁性体芯の存在範囲外に位置する、作業機。
続きを表示(約 710 文字)
【請求項2】
前記磁性体芯の軸方向と前記基板の表面とが略垂直であり、
前記磁気センサは、前記基板と垂直な方向から見て、前記リレーの存在範囲外に位置する、請求項1に記載の作業機。
【請求項3】
前記磁気センサは、前記基板の表面と略垂直な方向の磁気を検出するように構成される、請求項2に記載の作業機。
【請求項4】
前記磁気センサは、前記基板のうち前記リレーが搭載された面の反対面に搭載される、請求項3に記載の作業機。
【請求項5】
前記モータはロータ及びステータを有し、
前記基板は、前記モータの軸方向において前記ステータの一方側の端部に配置される、請求項1から4のいずれか一項に記載の作業機。
【請求項6】
前記基板は、前記モータの軸方向と垂直な姿勢で保持され、前記ステータよりも小径である、請求項5に記載の作業機。
【請求項7】
前記モータの軸方向において前記モータの回転軸を支持する軸受と前記ステータとの間に前記リレーが位置する、請求項5に記載の作業機。
【請求項8】
前記リレーはスルーホール実装型である、請求項4に記載の作業機。
【請求項9】
前記リレーの端子が、前記基板のうち前記磁気センサが搭載された面まで延びる、請求項8に記載の作業機。
【請求項10】
前記リレーは磁気によって動作する鉄片を有し、
前記鉄片は、前記リレーの内部における前記モータに対して反対側の領域に位置する、請求項1に記載の作業機。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
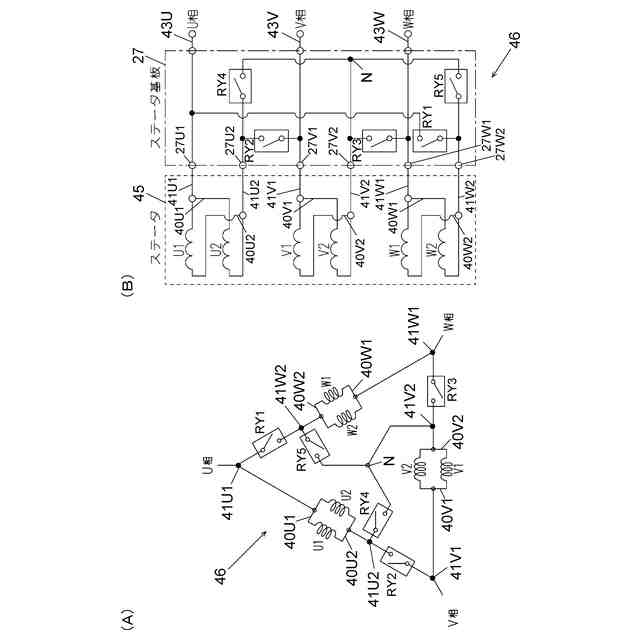
特許文献1は、接続される電源の種類(電源電圧)に応じてモータの巻線の結線方式を直列結線と並列結線に切替可能にした作業機としての電動工具を開示する。また、特許文献1は、結線方式を切り替えるためのリレーを搭載した基板をモータの端部(固定子の端部)に取り付けることを開示する。
【先行技術文献】
【特許文献】
【0003】
特開2017-121158号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
リレーの磁気がモータの回転検出用の磁気センサに影響を来たす可能性がある。また、リレーの動作が、周囲の磁気によって乱される可能性がある。
【0005】
本発明の目的は、リレーの磁気が磁気センサに与える影響を抑制可能な作業機を提供することである。本発明の別の目的は、周囲の磁気がリレーに与える影響を抑制可能な作業機を提供することである。
【課題を解決するための手段】
【0006】
本発明のある態様は、作業機である。この作業機は、
複数のコイルを有するモータと、
前記複数のコイルの結線切替用のリレーと、
前記モータの回転検出用の磁気センサと、
前記リレー及び前記磁気センサを搭載した基板と、を有し、
前記磁気センサは、前記リレーの有する磁性体芯の軸方向視において、前記磁性体芯の存在範囲外に位置する。
【0007】
本発明の別の態様は、作業機である。この作業機は、
複数のコイルを有するモータと、
前記複数のコイルの結線切替用のリレーと、
前記リレーに設けられる磁性体芯と、
前記モータの回転検出用の磁気センサと、
前記リレー及び前記磁気センサを搭載した基板と、を有し、
前記磁気センサは、
前記磁性体芯の軸方向に流れる磁気を検出するように構成され、かつ前記磁性体芯の軸方向視で前記磁性体芯の存在範囲外に位置する、
または、
前記磁性体芯の軸方向と交差する方向に流れる磁気を検出するように構成され、かつ前記磁性体芯の軸方向視で前記リレーの存在範囲内に位置する。
【0008】
本発明の別の態様は、作業機である。この作業機は、
複数のコイルを含むステータを有するモータと、
前記複数のコイルの結線切替用のリレーと、
前記リレーを搭載した基板と、を有し、
前記基板は、前記モータの軸方向において前記ステータの一方側の端部に配置され、
前記リレーの外部の磁気発生源から発せられる磁気の影響によって前記リレーのオンオフが切り替わらないよう構成される。
【0009】
本発明は「電動作業機」や「電動工具」、「電気機器」等と表現されてもよく、そのように表現されたものも本発明の態様として有効である。
【発明の効果】
【0010】
本発明によれば、リレーの磁気が磁気センサに与える影響を抑制可能な作業機を提供すること、又は、周囲の磁気がリレーに与える影響を抑制可能な作業機を提供することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
腰袋
11日前
株式会社エビス
連結具
2か月前
川崎重工業株式会社
ロボット
2か月前
株式会社マキタ
打撃工具
2か月前
株式会社マキタ
打撃工具
3か月前
株式会社マキタ
電動工具
19日前
株式会社マキタ
電動工具
4日前
株式会社マキタ
電動工具
2か月前
株式会社エビス
携帯付属物取付具
3か月前
株式会社ダイヘン
搬送装置
3か月前
株式会社マキタ
ハンマドリル
2か月前
川崎重工業株式会社
ロボット
2か月前
日本車輌製造株式会社
締め付け工具
19日前
川崎重工業株式会社
ロボットアーム
19日前
川崎重工業株式会社
ロボットアーム
19日前
川崎重工業株式会社
ロボットリスト
19日前
川崎重工業株式会社
ロボット
2か月前
日本信号株式会社
作業機制御システム
4日前
川崎重工業株式会社
ロボットシステム
19日前
CKD株式会社
吸着型搬送装置
1か月前
学校法人立命館
ロボットハンド
3か月前
川崎重工業株式会社
塗装ロボット
1か月前
長堀工業株式会社
締結装置
1か月前
株式会社アイエイアイ
グリッパー
2か月前
株式会社京阪エンジニアリング
脱着装置
5日前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
ジヤトコ株式会社
圧入装置
1か月前
株式会社アマダ
磁気吸着装置
1か月前
株式会社マキタ
集塵アタッチメント
4日前
株式会社山下工業研究所
ラチェットレンチ
2か月前
株式会社スター精機
ワーク搬送装置
8日前
株式会社不二越
ロボットの操作装置
2か月前
モトコマ株式会社
寄せポンチホルダー
20日前
工機ホールディングス株式会社
作業機
2か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ


































