TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024140074
公報種別
公開特許公報(A)
公開日
2024-10-10
出願番号
2023051067
出願日
2023-03-28
発明の名称
全方向移動体
出願人
国立大学法人宇都宮大学
代理人
個人
,
個人
主分類
B62D
11/04 20060101AFI20241003BHJP(鉄道以外の路面車両)
要約
【課題】全方向移動体の自由度に適合する3つのアクチュエータを備え、全方向移動の動作に対する制御性の優れる4輪型の全方向移動体を提供する。
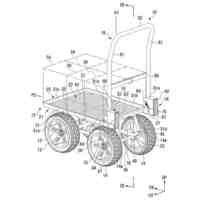
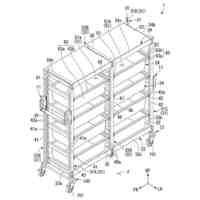
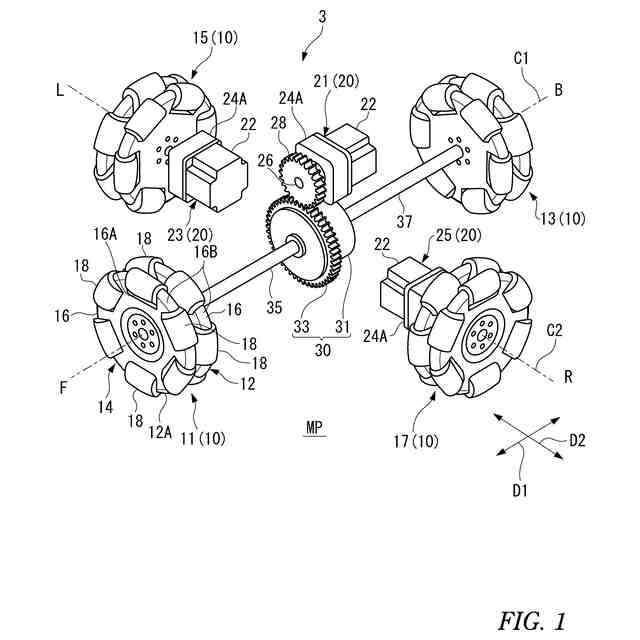
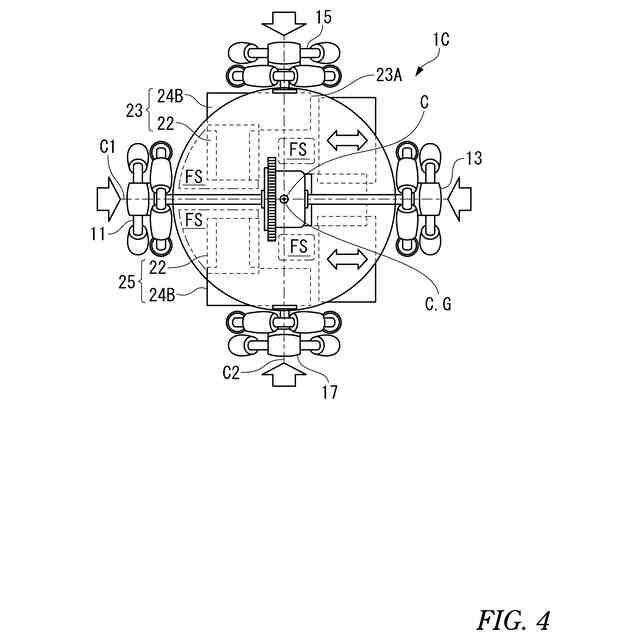
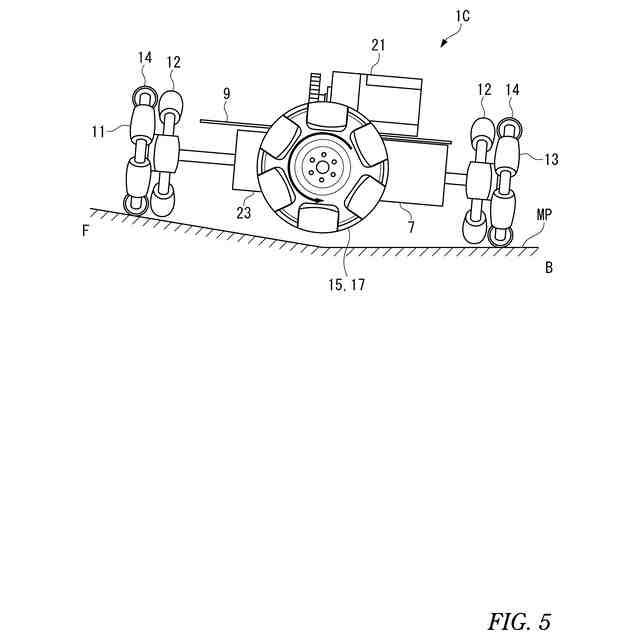
【解決手段】全方向移動体は、第1回転軸線C1を中心にして正転または逆転し、互いに間隔を隔てて配置される第1車輪11および第2車輪13と、第1回転軸線と直交する第2回転軸線を中心にして正転または逆転し、互いに間隔を隔てて配置される第3車輪15および第4車輪17と、第1車輪11と第2車輪13に正転または逆転の駆動力を出力する第1電動モータ21と、第3車輪15に正転または逆転の駆動力を出力する第2電動モータ23と、第4車輪17に正転または逆転の駆動力を出力する第3電動モータ25と、を備え、第1電動モータ21の駆動力を第1車輪11と第2車輪13に伝達する差動歯車装置30と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
第1回転軸線を中心にして正転または逆転し、互いに間隔を隔てて配置される第1車輪および第2車輪と、
前記第1回転軸線と直交する第2回転軸線を中心にして正転または逆転し、互いに間隔を隔てて配置される第3車輪および第4車輪と、
前記第1車輪と前記第2車輪に正転または逆転の駆動力を出力する第1電動モータと、
前記第3車輪に正転または逆転の駆動力を出力する第2電動モータと、
前記第4車輪に正転または逆転の駆動力を出力する第3電動モータと、を備え、
前記第1電動モータの駆動力を前記第1車輪と前記第2車輪に伝達する差動機構と、を備える、全方向移動体。
続きを表示(約 1,300 文字)
【請求項2】
前記第2電動モータおよび前記第3電動モータを同じ向きに回転させることにより前記第1回転軸線に沿う第1方向へ移動させ、
前記第1電動モータの正転または逆転により前記第2回転軸線に沿う第2方向へ移動させ、
前記第2電動モータおよび前記第3電動モータを異なる向きに回転させることにより、旋回運動をさせる、
請求項1に記載の全方向移動体。
【請求項3】
前記第1車輪および前記第2車輪は、平行リンク機構を備えるサスペンションを介してそれぞれが架台に支持される、
請求項1に記載の全方向移動体。
【請求項4】
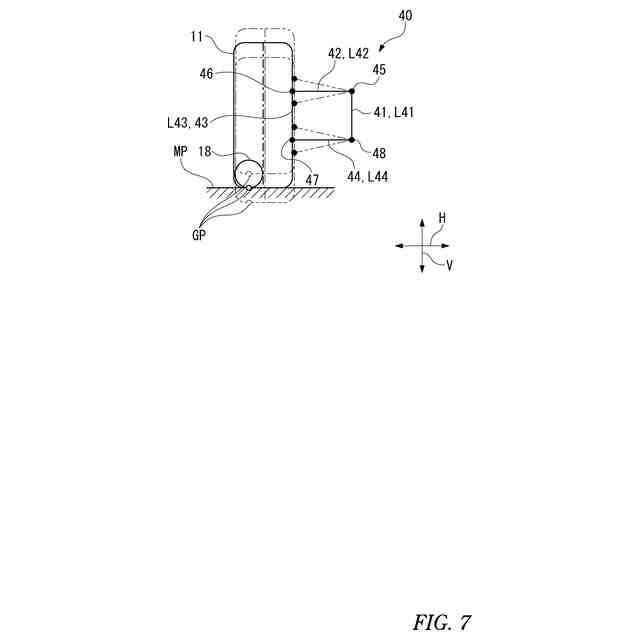
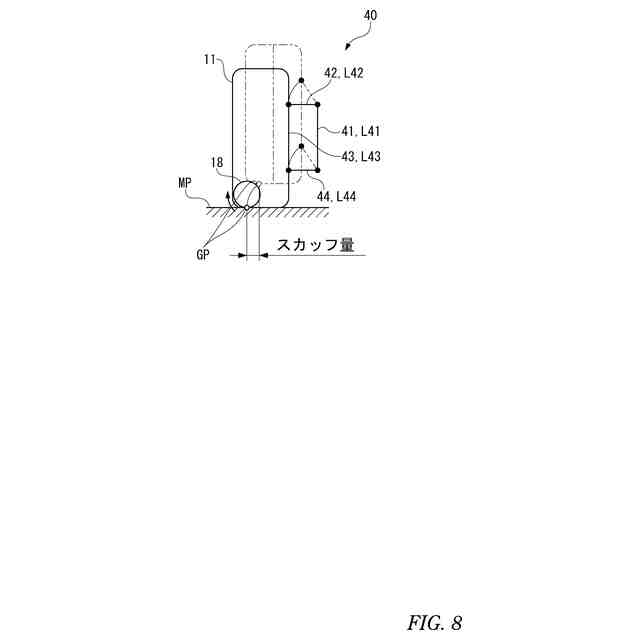
前記サスペンションを構成する前記平行リンク機構は、
前記架台の側に固定される第1リンクと、
前記第1リンクと対向し、前記第1車輪および前記第2車輪の側に設けられる第3リンクと、
前記第1リンクと前記第3リンクとを連結し、互いに間隔を隔てて設けられる第2リンクと第4リンクと、を備え、
前記第2リンクと前記第4リンクは、前記第1リンクと前記第2リンクよりもリンク長が短い、
請求項3に記載の全方向移動体。
【請求項5】
前記第1電動モータの駆動力を前記第1車輪および前記第2車輪のそれぞれに伝達する駆動力伝達構造を備え、
駆動力伝達構造は、一対の自在接手構造を備え、
前記第2リンクと前記第4リンクのリンク長をl
l
とし、
一対の自在接手構造の間隔をl
j
とすると、
l
l
=l
j
が成り立つ、請求項4に記載の全方向移動体。
【請求項6】
前記第1車輪、前記第2車輪、前記第3車輪および前記第4車輪と、
前記第1電動モータ、前記第2電動モータおよび第3電動モータと、
前記差動機構と、
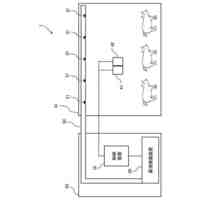
前記第1電動モータ、前記第2電動モータおよび第3電動モータに電力を供給するバッテリと、を支持し、おもて面とうら面を有する架台を備え、
前記第1電動モータは、前記おもて面の側に配置され、
前記第2電動モータ、前記第3電動モータおよび前記バッテリは、前記うら面の側に配置される、
請求項1に記載の全方向移動体。
【請求項7】
前記架台に支持される前記第2電動モータおよび前記第3電動モータのそれぞれは、回転電機と、前記回転電機の出力軸に連結される減速機と、を備え、
前記回転電機と前記減速機とは、平面視してL字状に配列される、
請求項6に記載の全方向移動体。
【請求項8】
前記第1車輪、前記第2車輪、前記第3車輪および前記第4車輪のそれぞれは、
ホイールと、前記ホイールの外周側に設けられ前記ホイールに対して転がり接触する複数のローラと、を備え、
前記ホイールは、前記駆動力により自転し、
前記ローラは、摩擦力が負荷されると従動回転する、
請求項1~請求項7のいずれか一項に記載の全方向移動体。
発明の詳細な説明
【技術分野】
【0001】
本発明は、全方向移動体に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
従来、例えば物品を搬送するための自律走行型台車が用いられており、搬送作業等の自動化が図られている。自律走行型台車の一例として、電動モータで駆動される全方向移動車輪を用いた自律走行型台車が知られている。この全方向移動体として、4つの全方向移動車輪と、4つの全方向移動車輪のそれぞれを駆動する電動モータと、を備える、4輪および4アクチュエータ式の台車の一例が特許文献1に開示されている。特許文献1は、バッテリの供給可能な電流に応じて駆動させるモータユニットの数を制限し、モータユニットで消費される全消費電流を減らすことを目的としている。
【先行技術文献】
【特許文献】
【0003】
特開2020-127278号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載されるような従来の4輪型全方向移動体は、4つのアクチュエータを各車輪に連結し、駆動する。しかし、全方向移動動作は3自由度のため、従来の4輪型全方向移動体は全方向移動動作に対してアクチュエータの数が1自由度だけ冗長となり、制御性を悪化させる。また、アクチュエータ数が増えることにより、台車の寸法および重量が増となり、運動性能やコスト競争力を下げる要因となる。
【0005】
以上より、本発明は、全方向移動体の自由度に適合する3つのアクチュエータを備え、全方向移動の動作に対する制御性の優れる4輪型の全方向移動体を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の全方向移動体は、
第1回転軸線を中心にして正転または逆転し、互いに間隔を隔てて配置される第1車輪および第2車輪と、
第1回転軸線と直交する第2回転軸線を中心にして正転または逆転し、互いに間隔を隔てて配置される第3車輪および第4車輪と、
第1車輪と第2車輪に正転または逆転の駆動力を出力する第1電動モータと、
第3車輪に正転または逆転の駆動力を出力する第2電動モータと、
第4車輪に正転または逆転の駆動力を出力する第3電動モータと、を備える。
本発明の全方向移動体は、第1電動モータの駆動力を第1車輪と第2車輪に伝達する差動機構と、を備える。
【0007】
本発明の全方向移動体において、好ましくは、
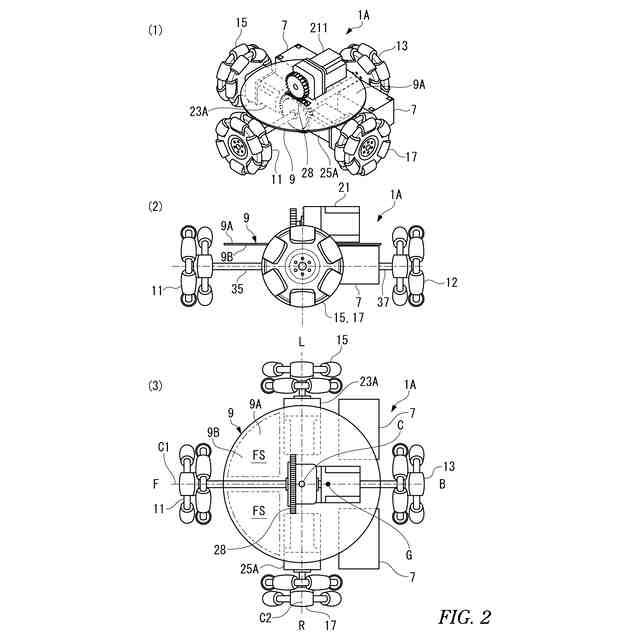
第2電動モータおよび第3電動モータを同じ向きに回転させることにより第1回転軸線に沿う第1方向へ移動させ、
第1電動モータの正転または逆転により第2回転軸線に沿う第2方向へ移動させ、
第2電動モータおよび第3電動モータを異なる向きに回転させることにより、旋回運動をさせる。
【0008】
本発明の全方向移動体において、好ましくは、
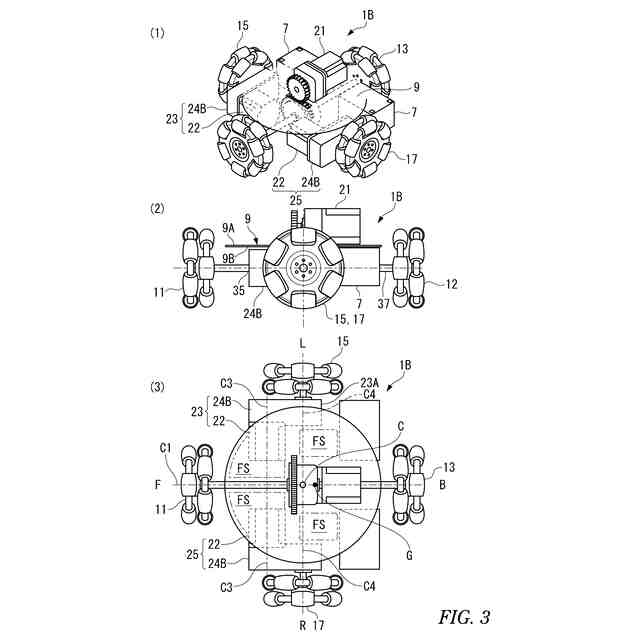
第1車輪および第2車輪は、平行リンク機構を備えるサスペンションを介してそれぞれが架台に支持される。
【0009】
本発明の全方向移動体において、好ましくは、
サスペンションを構成する平行リンク機構は、
架台の側に固定される第1リンクと、
第1リンクと対向し、第1車輪および第2車輪の側に設けられる第3リンクと、
第1リンクと第3リンクとを連結し、互いに間隔を隔てて設けられる第2リンクと第4リンクと、を備え、
第2リンクと第4リンクは、第1リンクと第2リンクよりもリンク長が短い。
【0010】
本発明の全方向移動体において、好ましくは、
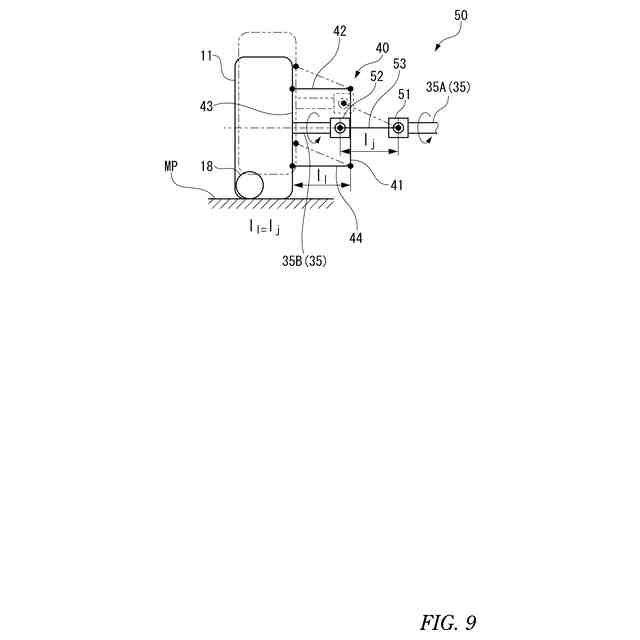
第1電動モータの駆動力を第1車輪および第2車輪のそれぞれに伝達する駆動力伝達構造を備え、
駆動力伝達構造は、一対の自在接手構造を備え、
第2リンクと第4リンクのリンク長をl
l
とし、
一対の自在接手構造の間隔をl
j
とすると、
l
l
=l
j
が成り立つ。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
国立大学法人宇都宮大学
蛍光体、蛍光体を含む光源、および新規無機酸化物
1か月前
国立大学法人宇都宮大学
空気中微生物濃度制御システム、及び空気中微生物濃度制御装置
9日前
個人
電動モビリティ
1か月前
個人
発音装置
1か月前
個人
折り畳み自転車
4か月前
個人
自転車用傘捕捉具
5か月前
個人
自由方向乗車自転車
1か月前
個人
自転車用荷台
9か月前
個人
体重掛けリフト台車
5か月前
個人
自転車用荷物台
5か月前
個人
キャンピングトライク
3か月前
個人
アタッチメント
5か月前
個人
ステアリングの操向部材
3か月前
個人
ステアリングの操向部材
8か月前
株式会社CPM
駐輪機
6か月前
三甲株式会社
台車
8か月前
祖峰企画株式会社
平台車
9か月前
三甲株式会社
台車
8か月前
株式会社三五
リアサブフレーム
4か月前
ダイハツ工業株式会社
車両
7か月前
学校法人千葉工業大学
車両
4か月前
学校法人千葉工業大学
車両
4か月前
豊田合成株式会社
操舵装置
6か月前
学校法人千葉工業大学
車両
4か月前
ヤマハ発動機株式会社
車両
6か月前
ヤマハ発動機株式会社
車両
6か月前
ヤマハ発動機株式会社
車両
6か月前
ヤマハ発動機株式会社
車両
6か月前
個人
自転車の駐輪場システム
2日前
株式会社カインズ
台車
2か月前
株式会社カインズ
台車
4か月前
株式会社クボタ
作業車
19日前
株式会社オカムラ
搬送用什器
2か月前
株式会社クボタ
作業車
9か月前
株式会社クボタ
作業車
9か月前
コンビ株式会社
乳母車
17日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ