TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024139867
公報種別
公開特許公報(A)
公開日
2024-10-10
出願番号
2023050798
出願日
2023-03-28
発明の名称
車両制御装置
出願人
株式会社アイシン
代理人
弁理士法人酒井国際特許事務所
主分類
B62D
6/00 20060101AFI20241003BHJP(鉄道以外の路面車両)
要約
【課題】車両の挙動を抑制することで、乗員に与える影響を少なくしつつ、車両を目標位置に退避させること。
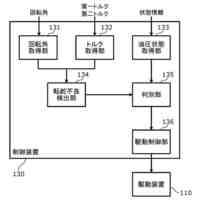
【解決手段】実施形態の車両制御装置は、車両に搭載される車両制御装置であって、前記車両を移動させる目標位置または舵角の状況に応じて、目標舵角を算出する目標舵角算出部と、前記車両の前後の加速度に基づいて、前記車両の前輪と後輪との舵角の比率を決定する比率決定部と、前記前輪と前記後輪のそれぞれに対し、前記目標舵角を前記比率で定まる舵角を算出する舵角算出部と、前記前輪と前記後輪のそれぞれに、算出された前記前輪と前記後輪のそれぞれの舵角の指示を行う制御部と、を備える。
【選択図】図4
特許請求の範囲
【請求項1】
車両に搭載される車両制御装置であって、
前記車両を移動させる目標位置または舵角の状況に応じて、目標舵角を算出する目標舵角算出部と、
前記車両の前後の加速度に基づいて、前記車両の前輪と後輪との舵角の比率を決定する比率決定部と、
前記前輪と前記後輪のそれぞれに対し、前記目標舵角を前記比率で定まる舵角を算出する舵角算出部と、
前記前輪と前記後輪のそれぞれに、算出された前記前輪と前記後輪のそれぞれの舵角の指示を行う制御部と、
を備える車両制御装置。
続きを表示(約 470 文字)
【請求項2】
前記車両のヨー角に基づく補正値を決定する補正算出部をさらに備え、
前記舵角算出部は、前記前輪と前記後輪のそれぞれに対し、前記目標舵角を前記比率で定まる値に前記補正値で補正した舵角を算出する、
請求項1に記載の車両制御装置。
【請求項3】
前記車両の速度に基づいて、舵角の変化率を求める制限部、をさらに備え、
前記制御部は、前記前輪と前記後輪のそれぞれに、前記変化率で、前記舵角を変化させるように前記舵角の指示を行う、
請求項2に記載の車両制御装置。
【請求項4】
前記制御部は、前記舵角の指示を、前記前輪と前記後輪とに対して略同時に行う、
請求項1に記載の車両制御装置。
【請求項5】
運転者の異常を判断する異常判断部、をさらに備え、
前記目標舵角算出部は、前記運転者の異常がであると判断された場合に、前記車両を退避させる前記目標位置に基づいて、前記目標舵角を算出する、
請求項1~4のいずれか一つに記載の車両制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、車両制御装置に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来から、車両を自動的に退避走行させる技術が知られている。例えば、ハンドルが故障した場合に、ブレーキを使用して、ヨーモーメントを発生させることで、車両を目的の位置に退避走行させる技術がある(例えば、特許文献1参照)。
【0003】
運転者にとって、車両の挙動は意図した動作であれば快適に感じるが、乗員にとっては、運転操作を行っていない。このため、意図しない車両の挙動は体が揺さぶられるので、乗員にとって快適であるとは限らない。また、運転者が意識を失った場合に車両の退避走行を行う場合において、車両の挙動は小さいほうが運転者の姿勢も崩れず有益である。
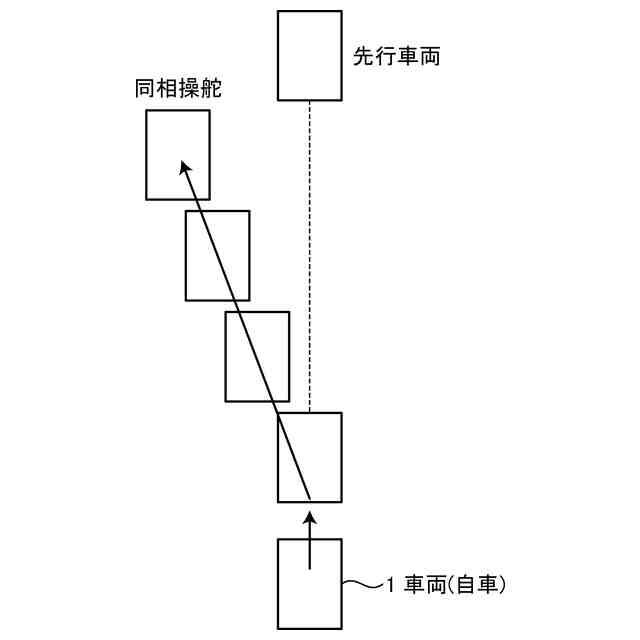
【0004】
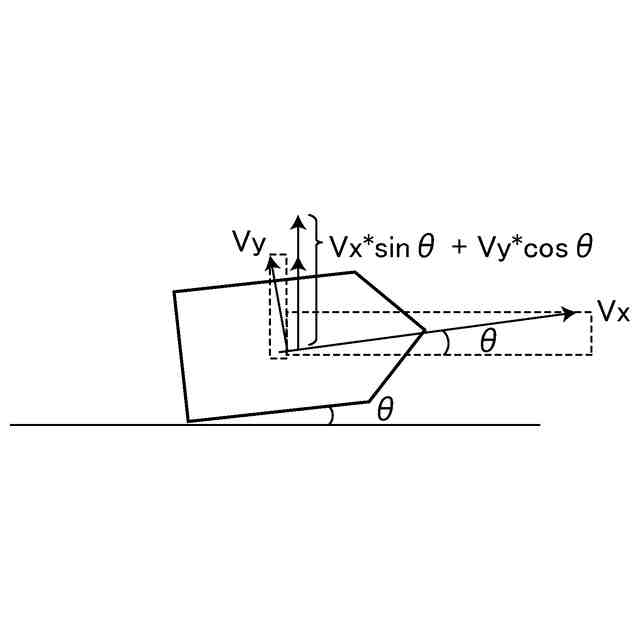
このため、車両の挙動の小さい退避走行を行う技術として、従来から、4WS等において、前輪と後輪とを同じ舵角として平行な車輪角度を実現することで、ヨーレートの発生を抑制する同相操舵制御の技術が知られている。例えば、車両の4輪を独立に操舵可能な機構を設け、ヨー挙動のない斜め方向に車両を走行させるために、車両停車中に4輪を平行な舵角に変化させる技術が知られている(例えば、特許文献2参照)。
【先行技術文献】
【特許文献】
【0005】
特開2003-063373号公報
特開2008-13045号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、このような従来技術では、前輪と後輪が過渡的に切れる状況においては、前後輪のタイヤの特性によっては、多少左右に車両が向いてしまう。このため、目標の退避位置まで車両を退避走行させることが困難になる場合がある。特に、制動中は前輪の荷重が増加し、舵角の効きが前輪は向上し、後輪は低下するので、前輪と後輪が同じ舵角になっても、ヨーレートが発生し続けてしまい、運転者の姿勢が崩れたり、乗員に不快感を与えてしまう場合もある。
【0007】
そこで、本発明の課題の一つは、車両の挙動を抑制することで、乗員に与える影響を少なくしつつ、車両を目標位置に退避させることである。
【課題を解決するための手段】
【0008】
実施形態の車両制御装置は、車両に搭載される車両制御装置であって、前記車両を移動させる目標位置または舵角の状況に応じて、目標舵角を算出する目標舵角算出部と、前記車両の前後の加速度に基づいて、前記車両の前輪と後輪との舵角の比率を決定する比率決定部と、前記前輪と前記後輪のそれぞれに対し、前記目標舵角を前記比率で定まる舵角を算出する舵角算出部と、前記前輪と前記後輪のそれぞれに、算出された前記前輪と前記後輪のそれぞれの舵角の指示を行う制御部と、を備える。
【0009】
当該構成により、一例として、車両の挙動を抑制することで、乗員に与える影響を少なくしつつ、車両を目標位置に移動させることができる。
【0010】
また、実施形態の車両制御装置において、前記車両のヨー角に基づく補正値を決定する補正算出部をさらに備え、前記舵角算出部は、前記前輪と前記後輪のそれぞれに対し、前記目標舵角を前記比率で定まる値に前記補正値で補正した舵角を算出する。当該構成により、一例として、ヨー角に起因して車両が目標位置に到達できないことを回避することで、車両を目標位置に確実に移動させることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
自転車用荷台
2か月前
井関農機株式会社
作業車両
4か月前
個人
ステアリングの操向部材
2か月前
三甲株式会社
台車
1か月前
三甲株式会社
台車
1か月前
祖峰企画株式会社
平台車
3か月前
ヤマハ発動機株式会社
車両
3日前
ダイハツ工業株式会社
車両
21日前
ヤマハ発動機株式会社
車両
3日前
ヤマハ発動機株式会社
車両
3日前
ヤマハ発動機株式会社
車両
3日前
アルインコ株式会社
運搬台車
4か月前
アルインコ株式会社
運搬台車
4か月前
株式会社クボタ
作業車
3か月前
株式会社クボタ
作業車
3か月前
個人
手押し運搬車車輪システム
1か月前
ダイハツ工業株式会社
車両構造
3か月前
株式会社ジェイテクト
操舵装置
1か月前
ダイハツ工業株式会社
車両構造
3か月前
ダイハツ工業株式会社
車両構造
3か月前
ダイハツ工業株式会社
車両構造
15日前
株式会社Kaedear
給電器
1か月前
個人
自転車荷台への搭載物の取付構造
2か月前
株式会社宝島社
アシスト自転車
2か月前
三菱自動車工業株式会社
車体構造
8日前
学校法人幾徳学園
リカンベント型自転車
1か月前
有限会社藤誠
搬送台車装置
9日前
株式会社リッチェル
歩行車
3か月前
株式会社SUBARU
車体後部構造
1か月前
株式会社SUBARU
車体前部構造
4か月前
ダイハツ工業株式会社
ハンドル装置
1か月前
株式会社クボタ
作業車
3か月前
株式会社SUBARU
車両前部構造
2か月前
スズキ株式会社
車両下部構造
4か月前
日本車輌製造株式会社
無人搬送台車
24日前
株式会社クボタ
作業車
4か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ