TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024132272
公報種別
公開特許公報(A)
公開日
2024-09-30
出願番号
2023042993
出願日
2023-03-17
発明の名称
ステアバイワイヤ式操舵装置のモータ制御装置
出願人
トヨタ自動車株式会社
,
株式会社ジェイテクト
,
株式会社デンソー
代理人
弁理士法人YKI国際特許事務所
主分類
B62D
6/00 20060101AFI20240920BHJP(鉄道以外の路面車両)
要約
【課題】ステアバイワイヤ式操舵装置の、2系統の冗長系を有するモータ制御装置において、急操舵操作時における異常判定の誤判定を回避する。
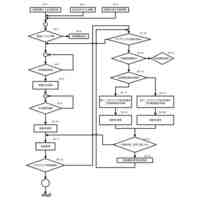
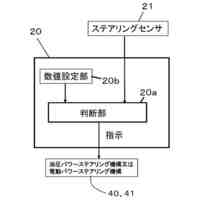
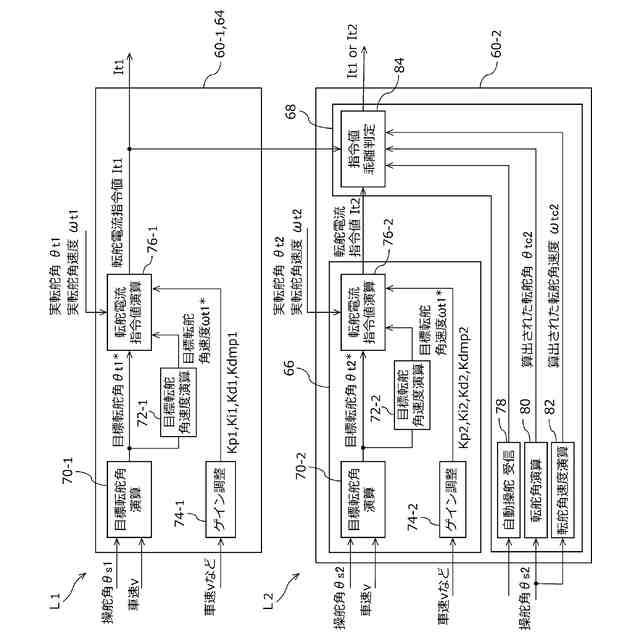
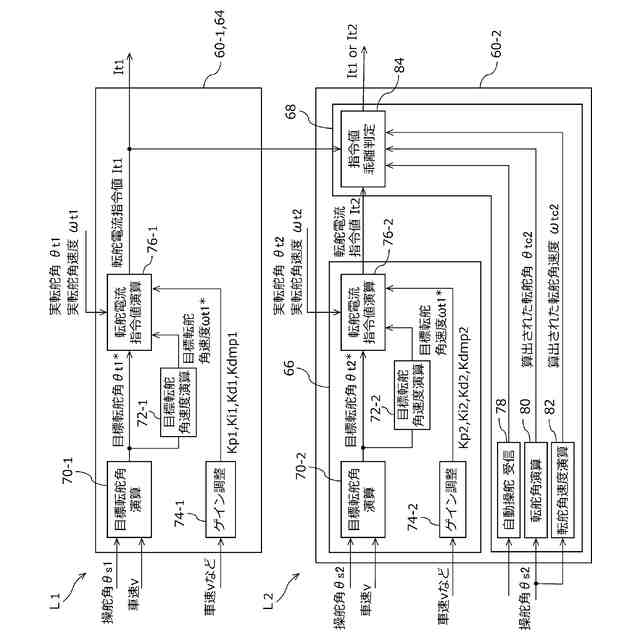
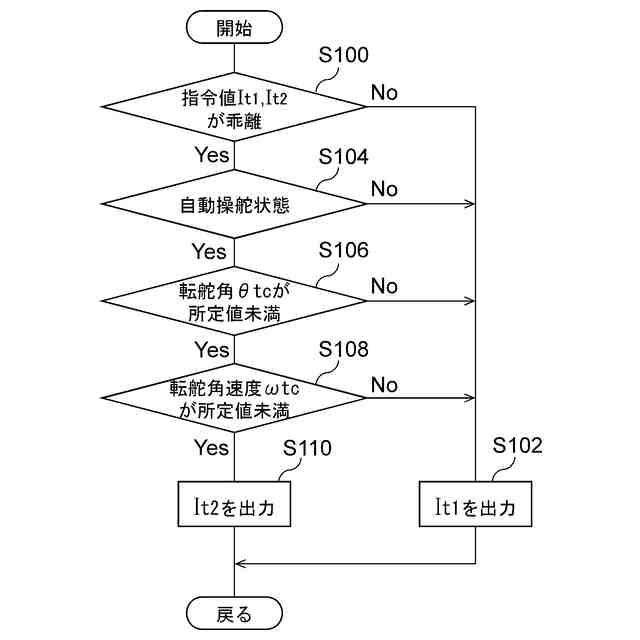
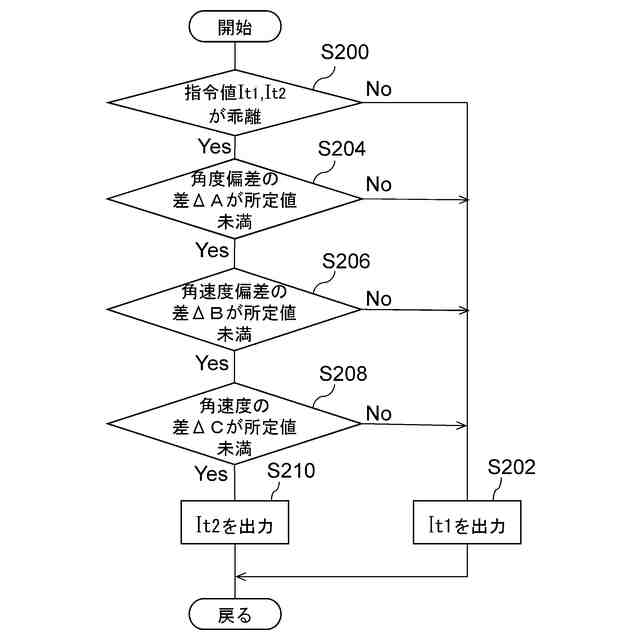
【解決手段】第1系統L1および第2系統L2が正常なときには、第3プロセッサ68は第1転舵電流指令値It1を出力する。第3プロセッサ68は、第1転舵電流指令値It1と第2転舵電流指令値It2に乖離が生じていると、第2転舵電流指令値It2を出力する。第3プロセッサ68は、急操舵操作を判定すると、転舵電流指令値It1,It2が乖離しているか否かにかかわらず、第1転舵電流指令値It1を出力する。急操舵操作に伴う転舵電流指令値It1,It2の乖離による誤判定が回避される。
【選択図】図3
特許請求の範囲
【請求項1】
ステアバイワイヤ式操舵装置の転舵アクチュエータに用いられ、第1コイルセットと第2コイルセットを有するモータを制御するモータ制御装置であって、
指令値に基づく駆動電流を前記第1コイルセットに供給する第1駆動回路と、
指令値に基づく駆動電流を前記第2コイルセットに供給する第2駆動回路と、
ステアリングホイールの操舵角の第1検出値に基づき第1指令値を算出し、前記第1指令値を前記第1駆動回路へ送出するように構成された第1プロセッサと、
ステアリングホイールの操舵角の第2検出値に基づき第2指令値を算出するように構成された第2プロセッサと、
前記第1指令値と前記第2指令値が乖離していないときには、前記第1指令値を前記第2駆動回路に送出し、前記第1指令値と前記第2指令値が乖離しているときには、前記第2指令値を前記第2駆動回路に送出するように構成された第3プロセッサと、
を含み、
前記第3プロセッサは、さらに、急操舵状態のときには、前記第1指令値と前記第2指令値が乖離しているか否かにかかわらず、前記第1指令値を前記第2駆動回路に送出するよう構成されている、
モータ制御装置。
続きを表示(約 1,200 文字)
【請求項2】
請求項1に記載のモータ制御装置であって、前記第3プロセッサは、さらに、自動操舵状態でないときには、前記第1指令値と前記第2指令値が乖離しているか否かにかかわらず、前記第1指令値を前記第2駆動回路に送出するよう構成されている、モータ制御装置。
【請求項3】
ステアバイワイヤ式操舵装置の転舵アクチュエータに用いられる、第1コイルセットと第2コイルセットを有するモータを制御するモータ制御装置であって、
受けた指令値に基づく駆動電流を前記第1コイルセットに供給する第1駆動回路と、
受けた指令値に基づく駆動電流を前記第2コイルセットに供給する第2駆動回路と、
ステアリングホイールの操舵角の第1検出値に基づき第1指令値を算出し、前記第1指令値を前記第1駆動回路へ送出するように構成された第1プロセッサと、
ステアリングホイールの操舵角の第2検出値に基づき第2指令値を算出するように構成された第2プロセッサと、
前記第1指令値と前記第2指令値が乖離していないときには、前記第1指令値を前記第2駆動回路に送出し、前記第1指令値と前記第2指令値が乖離しているときには、前記第2指令値を前記第2駆動回路に送出するように構成された第3プロセッサと、
を含み、
前記第3プロセッサは、自動操舵状態でないときには、前記第1指令値と前記第2指令値が乖離しているか否かにかかわらず、前記第1指令値を前記第2駆動回路に送出するよう構成されている、
モータ制御装置。
【請求項4】
請求項1または2に記載のモータ制御装置であって、第3プロセッサは、前記操舵角に基づき算出された、車輪の転舵角が所定値以上、かつ前記操舵角に基づき算出された、車輪の転舵角速度が所定値以上のとき、急操舵状態と判定するよう構成されている、モータ制御装置。
【請求項5】
請求項1または2に記載のモータ制御装置であって、
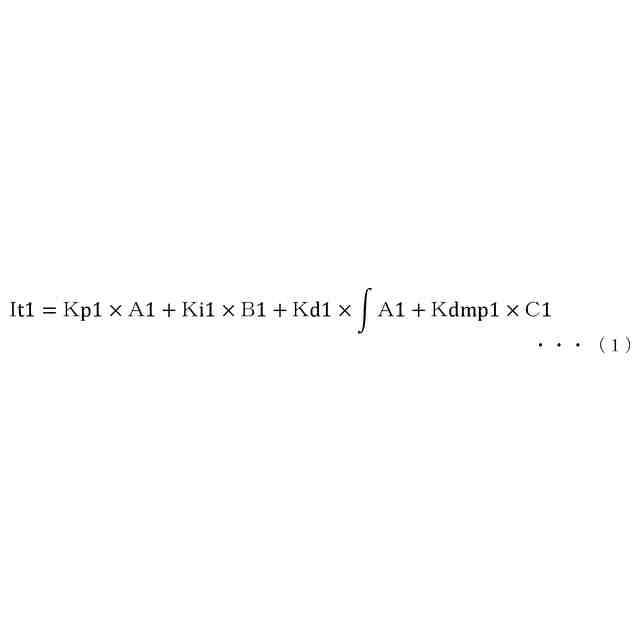
前記第1プロセッサは、車輪の転舵角および転舵角速度に関するフィードバック演算により、前記第1指令値を算出するように構成され、
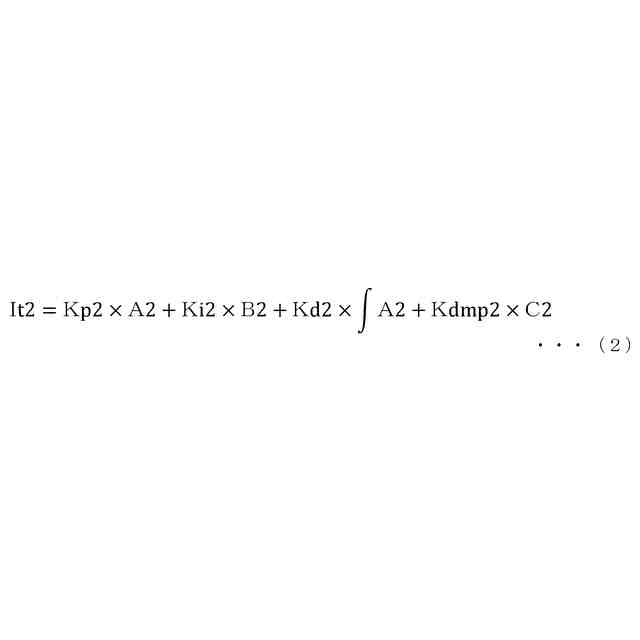
前記第2プロセッサは、車輪の転舵角および転舵角速度に関するフィードバック演算により、前記第2指令値を算出するように構成され、
第3プロセッサは、
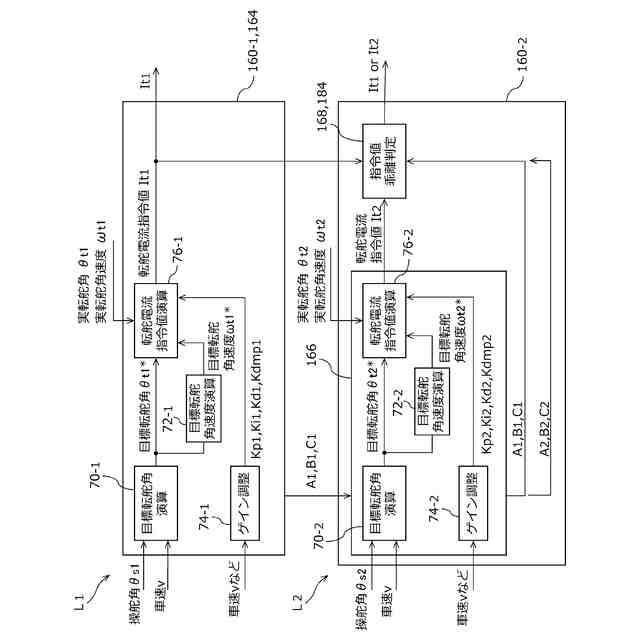
前記第1プロセッサにおける前記転舵角の目標値と実際値の偏差と、前記第2プロセッサにおける前記転舵角の目標値と実際値の偏差との差が所定値以上のとき、または、
前記第1プロセッサにおける前記転舵角速度の目標値と実際値の偏差と、前記第2プロセッサにおける前記転舵角速度の目標値と実際値の偏差との差が所定値以上のとき、または、
前記第1プロセッサにおける転舵角速度の実際値と、前記第2プロセッサにおける転舵角速度の実際値との差が所定値以上のとき、
急操舵状態と判定するように構成されている、
モータ制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ステアバイワイヤ式操舵装置に関し、車輪を転舵させる転舵アクチュエータに用いられるモータの制御装置に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
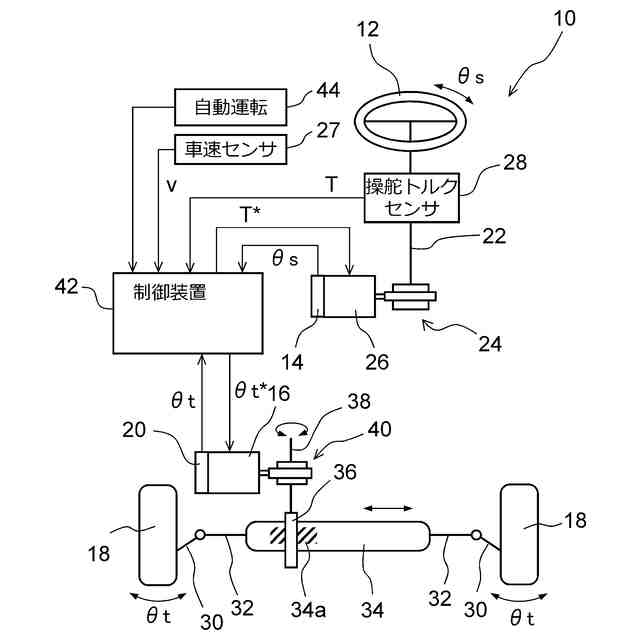
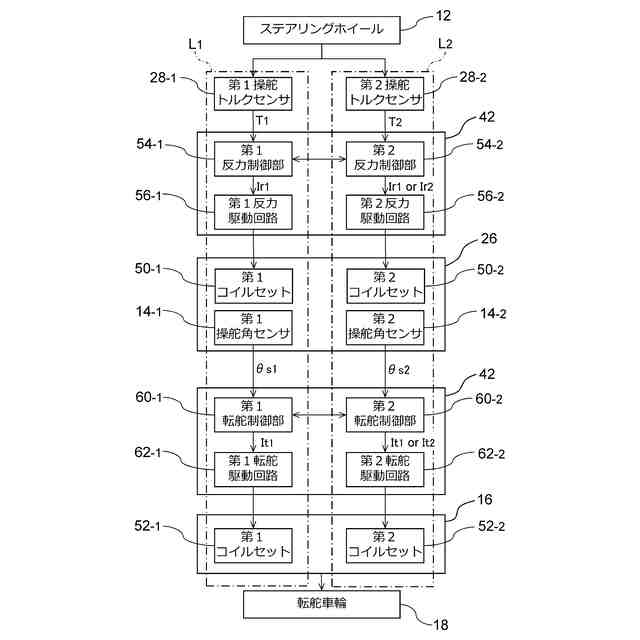
従来の操舵装置は、運転者が操作するステアリングホイールが、転舵される車輪と機械的に連結されている。これに対し、ステアバイワイヤ式操舵装置においては、ステアリングホイールは、転舵される車輪と機械的に連結されていない。ステアバイワイヤ式操舵装置では、ステアリングホイールを操舵操作した角度である操舵角が電気信号に変換される。この電気信号に基づき転舵アクチュエータが車輪を転舵する。ステアリングホイールには、従来の操舵装置における操作の手応えを模擬した操舵反力が反力アクチュエータによって加えられる。転舵アクチュエータおよび反力アクチュエータは、電気モータを用いて構成される。一般的に、操舵角に対する転舵角の比は、ステアバイワイヤ式操舵装置が、従来の操舵装置に比べて大きい。つまり、操舵角が同じ場合、転舵車輪の転舵角は、従来の操舵装置における転舵角よりも、ステアバイワイヤ式操舵装置における転舵角が大きくなる。
【0003】
下記特許文献1には、電動パワーステアリング装置(8)に備わるモータ(80)を制御する制御装置(ECU10)が記載されている。電動パワーステアリング装置においては、ステアリングホイールと転舵輪が機械的に連結されている。モータ(80)は、第1モータ巻線(180)と第2モータ巻線(280)を有する。制御装置(10)は、第1モータ巻線(180)に対応する第1系統(L1)と、第2モータ巻線(280)に対応する第2系統(L2)を含む。第1系統(L1)では、電流指令値(I1’)が算出され、第2系統では、電流指令値(I2’)が算出される。第2系統(L2)において、第1系統の電流指令値(I1’)と第2系統の電流指令値(I2’)が比較され、これらが乖離していない場合(正常時)には、第1系統の電流指令値(I1’)に基づき第1モータ巻線(180)と第2モータ巻線(280)に電流が供給される(協調制御)。第1系統の電流指令値(I1’)と第2系統の電流指令値(I2’)が乖離していた場合(異常時)には、第1系統の電流指令値(I1’)に基づき第1モータ巻線(180)に電流が供給され、また、第2系統の電流指令値(I2’)に基づき第2モータ巻線(280)に電流が供給される(独立制御)(段落0198-0202参照)。
【先行技術文献】
【特許文献】
【0004】
特開2018-130007号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ステアバイワイヤ式操舵装置においては、電動パワーステアリング装置等の従来の操舵装置に比して、電流指令値のばらつきが大きくなる傾向がある。この結果、2つの系統の電流指令値の乖離が大きくなる場合がある。例えば、ステアバイワイヤ式操舵装置では、操舵角が電気信号に変換されて転舵制御に用いられるため、操舵角の検出誤差によって指令値にばらつきが生じる。また、ステアバイワイヤ式操舵装置では、操舵角に対する転舵角が従来の操舵装置よりも大きく、操舵角の検出誤差が増幅され、指令値にばらつきが生じる。指令値のばらつきが大きくなると、2つの系統の指令値の乖離が大きくなる場合がある。特に、操舵角が大きく変化する急操舵操作において、この傾向が現れ、異常判定に関して、誤判定されやすくなる。
【0006】
本発明は、急操舵操作時において、装置の異常判定に関する誤判定に基づいた制御が実行される機会を抑制することにある。
【課題を解決するための手段】
【0007】
本発明に係るモータ制御装置は、ステアバイワイヤ式操舵装置の転舵アクチュエータに用いられ、第1コイルセットと第2コイルセットを有する。モータ制御装置は、指令値に基づく駆動電流を第1コイルセットに供給する第1駆動回路と、指令値に基づく駆動電流を第2コイルセットに供給する第2駆動回路と、ステアリングホイールの操舵角の第1検出値に基づき第1指令値を算出し、第1指令値を第1駆動回路へ送出するように構成された第1プロセッサと、ステアリングホイールの操舵角の第2検出値に基づき第2指令値を算出するように構成された第2プロセッサと、第1指令値と第2指令値が乖離していないときには、第1指令値を第2駆動回路に送出し、第1指令値と第2指令値が乖離しているときには、第2指令値を第2駆動回路に送出するように構成された第3プロセッサと、を含む。第3プロセッサは、急操舵状態のときには、第1指令値と第2指令値が乖離しているか否かにかかわらず、第1指令値を第2駆動回路に送出するよう構成されている。
【0008】
急操舵状態のときに誤判定に基づく制御が実行されることを抑制することができる。
【0009】
上記のモータ制御装置において、第3プロセッサは、上記の急操舵状態に対応した構成に加えて、または替えて、自動操舵状態でないときには、第1指令値と第2指令値が乖離しているか否かにかかわらず、第1指令値を第2駆動回路に送出するよう構成されてよい。
【0010】
急操舵操作が行われない状況のときだけ、異常判定結果が反映される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
自転車の傘
10か月前
個人
サドル揺動装置
12か月前
個人
重量物移動台車
7か月前
個人
自転車用傘捕捉具
19日前
個人
自転車用荷台
3か月前
個人
車両用横転防止装置
8か月前
井関農機株式会社
作業機
8か月前
井関農機株式会社
作業機
10か月前
個人
アタッチメント
20日前
個人
自転車用荷物台
3日前
三甲株式会社
保護具
8か月前
井関農機株式会社
作業車両
5か月前
個人
クリアレインシェード
7か月前
日本精機株式会社
表示装置
9か月前
個人
ステアリングの操向部材
3か月前
株式会社クラベ
面状ユニット
6か月前
株式会社北誠商事
被覆構造体
9か月前
株式会社CPM
駐輪機
26日前
株式会社ホシプラ
台車
7か月前
個人
スライドレインプルーフ
6か月前
三甲株式会社
台車
10か月前
三甲株式会社
台車
8か月前
三甲株式会社
台車
2か月前
三甲株式会社
台車
2か月前
祖峰企画株式会社
平台車
4か月前
帝人株式会社
車両構造体
6か月前
井関農機株式会社
作業車両
10か月前
豊田合成株式会社
ハンドル
6か月前
豊田合成株式会社
操舵装置
1か月前
ヤマハ発動機株式会社
車両
1か月前
ヤマハ発動機株式会社
車両
1か月前
ヤマハ発動機株式会社
車両
1か月前
ヤマハ発動機株式会社
車両
1か月前
豊田合成株式会社
ハンドル
10か月前
井関農機株式会社
走行車両
8か月前
個人
足踏みペダル式自転車
6か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ