TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024131971
公報種別
公開特許公報(A)
公開日
2024-09-30
出願番号
2023042580
出願日
2023-03-17
発明の名称
車両制御装置
出願人
株式会社アイシン
代理人
弁理士法人酒井国際特許事務所
主分類
B62D
6/00 20060101AFI20240920BHJP(鉄道以外の路面車両)
要約
【課題】車両を目標経路に沿って走行させる場合に目標経路における異なる種類の線のつなぎ目の前後で滑らかな操舵を実現する。
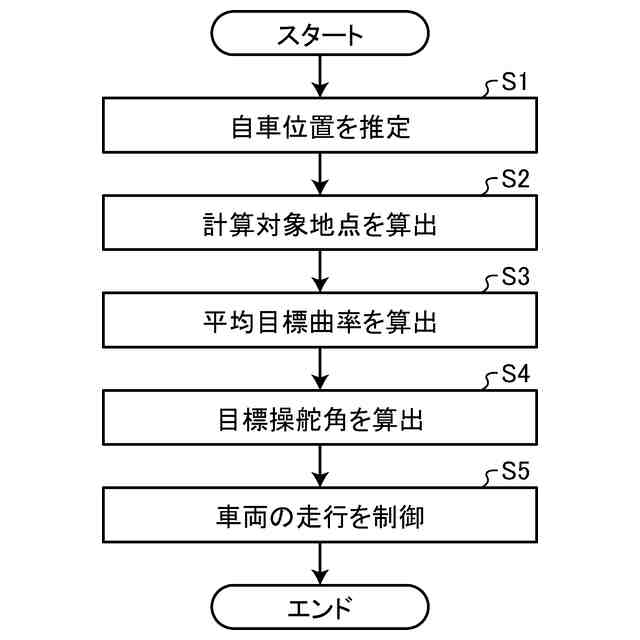
【解決手段】実施形態の車両制御装置は、複数種類の線をつなぎ合わせて作成された目標経路に沿って車両を走行させる車両制御装置であって、前記目標経路における計算対象地点、および、その前後の所定数の地点を含む複数の地点であって、いずれかの地点が異なる種類の線のつなぎ目である前記複数の地点の目標曲率のなまし値を算出することで、前記計算対象地点に関するなまし目標曲率を算出する目標曲率算出部と、前記なまし目標曲率に基づいて目標操舵角を算出する目標操舵角算出部と、前記車両を走行させるときに、前記目標操舵角に基づいて操舵を制御する制御部と、を備える。
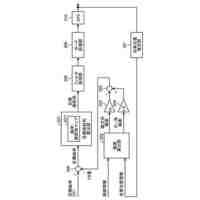
【選択図】図6
特許請求の範囲
【請求項1】
複数種類の線をつなぎ合わせて作成された目標経路に沿って車両を走行させる車両制御装置であって、
前記目標経路における計算対象地点、および、その前後の所定数の地点を含む複数の地点であって、いずれかの地点が異なる種類の線のつなぎ目である前記複数の地点の目標曲率のなまし値を算出することで、前記計算対象地点に関するなまし目標曲率を算出する目標曲率算出部と、
前記なまし目標曲率に基づいて目標操舵角を算出する目標操舵角算出部と、
前記車両を走行させるときに、前記目標操舵角に基づいて操舵を制御する制御部と、を備える車両制御装置。
続きを表示(約 350 文字)
【請求項2】
前記目標曲率算出部は、前記複数の地点の目標曲率の平均値、または、前記複数の地点の目標曲率に重み付けを行って前記目標曲率の加重平均値を算出して取得した前記目標曲率の加重平均値を、前記なまし目標曲率として算出する、請求項1に記載の車両制御装置。
【請求項3】
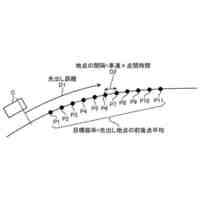
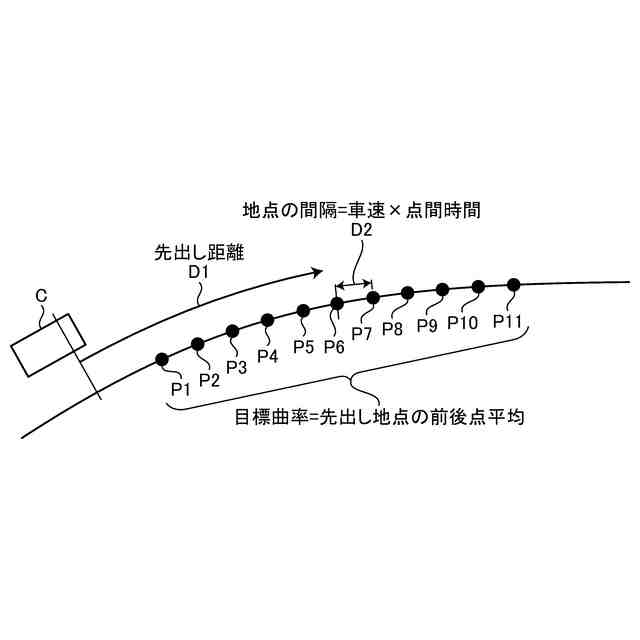
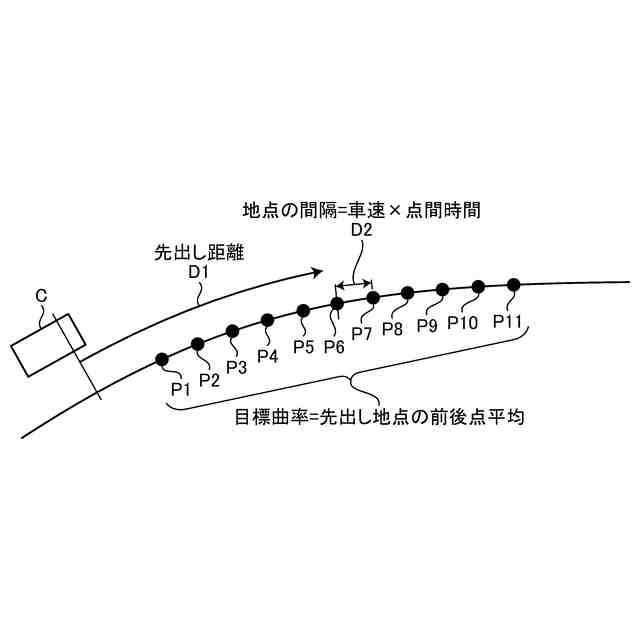
前記なまし目標曲率算出部は、前記複数の地点の位置を決定する場合に、前記計算対象地点を基準に、車速に予め設定された所定時間を乗算して得られる距離の分だけ進んだ位置を隣の地点の位置として決定し、この計算を繰り返すことで前記複数の地点の位置を決定する、請求項2に記載の車両制御装置。
【請求項4】
前記なまし目標曲率算出部は、前記車速として、目標車速を用いる、請求項3に記載の車両制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、車両制御装置に関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
従来から、車両を目標経路に沿って走行させる技術の開発が進められている。その場合、目標経路は、例えば、直線、円弧、クロソイド曲線などの複数種類の線をつなぎ合わせて作成される。
【先行技術文献】
【特許文献】
【0003】
特開2017-30482号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
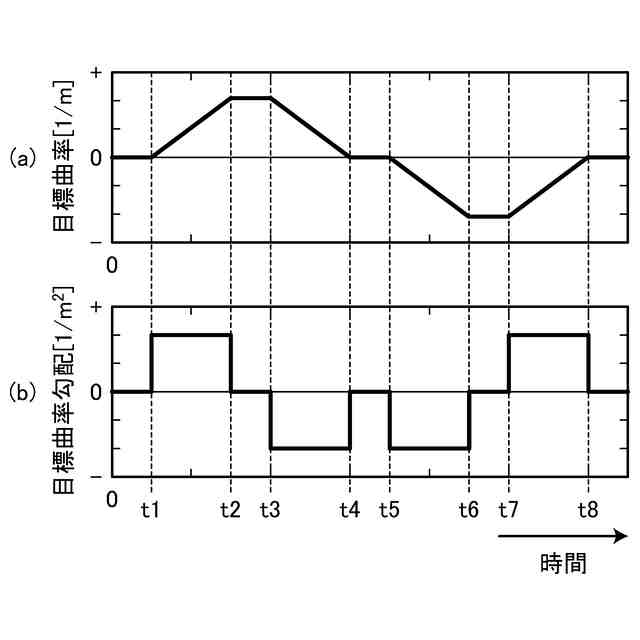
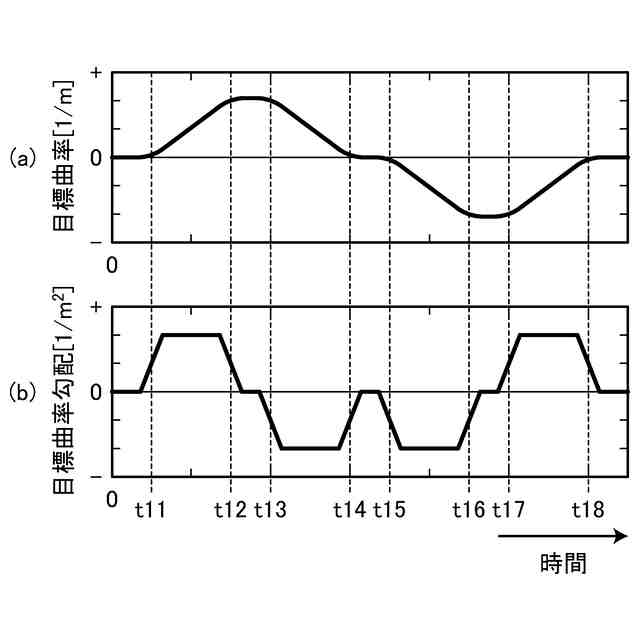
しかしながら、上述の従来技術では、目標経路における異なる種類の線のつなぎ目(例えば、クロソイド曲線と円弧のつなぎ目など)について操舵制御を行う場合に、目標曲率勾配(目標曲率の1階微分値)がステップ状に変化することによって滑らかな操舵とならず、乗り心地が悪化する場合がある。
【0005】
そこで、本発明は、上記事情に鑑みてなされたものであり、車両を目標経路に沿って走行させる場合に目標経路における異なる種類の線のつなぎ目の前後で滑らかな操舵を実現できる車両制御装置を提供することを目的としている。
【課題を解決するための手段】
【0006】
上記課題を解決するために、実施形態の車両制御装置は、複数種類の線をつなぎ合わせて作成された目標経路に沿って車両を走行させる車両制御装置であって、前記目標経路における計算対象地点、および、その前後の所定数の地点を含む複数の地点であって、いずれかの地点が異なる種類の線のつなぎ目である前記複数の地点の目標曲率なまし値を算出することで、前記計算対象地点に関するなまし目標曲率を算出するなまし目標曲率算出部と、前記なまし目標曲率に基づいて目標操舵角を算出する目標操舵角算出部と、前記車両を走行させるときに、前記目標操舵角に基づいて操舵を制御する制御部と、を備える。
【0007】
上記構成によれば、車両を目標経路に沿って走行させる場合に、なまし目標曲率に基づく目標操舵角を用いて操舵制御することで、目標経路における異なる種類の線のつなぎ目の前後で滑らかな操舵を実現できる。
【0008】
また、車両制御装置において、前記平均目標曲率算出部は、前記複数の地点の目標曲率の平均値、または、前記複数の地点の目標曲率に重み付けを行って前記目標曲率の加重平均値を算出して取得した前記目標曲率の加重平均値を、前記なまし目標曲率として算出する。
【0009】
上記構成によれば、目標曲率の平均値または加重平均値に基づく目標操舵角を用いた操舵制御を、簡潔な処理によって実行することができる。
【0010】
また、車両制御装置において、前記なまし目標曲率算出部は、前記複数の地点の位置を決定する場合に、前記計算対象地点を基準に、車速に予め設定された所定時間を乗算して得られる距離の分だけ進んだ位置を隣の地点の位置として決定し、この計算を繰り返すことで前記複数の地点の位置を決定する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社アイシン
車両制御装置
今日
株式会社アイシン
車両制御装置
今日
株式会社アイシン
モータ制御装置
今日
株式会社アイシン
車両用駆動装置
今日
株式会社アイシン
電源モジュール
今日
株式会社アイシン
自車位置検出装置
今日
株式会社アイシン
圧入部品交換方法
今日
株式会社アイシン
車両用給電システム
今日
株式会社アイシン
バッテリの冷却構造
今日
株式会社アイシン
巻線界磁式回転電機
今日
株式会社アイシン
車両用スパッツ装置
今日
株式会社アイシン
車両用ドアロック装置
今日
株式会社アイシン
車両用のドア押出装置
今日
株式会社アイシン
エネルギ貯蔵システム
今日
株式会社アイシン
調光装置、及び調光方法
今日
トヨタ自動車株式会社
全輪駆動車両の制御装置
今日
株式会社豊田中央研究所
異方軟磁性積層造形物およびその製造方法
今日
株式会社豊田中央研究所
二酸化炭素回収システム、二酸化炭素循環システム、および、二酸化炭素回収方法
今日
個人
自転車の傘
8か月前
個人
重量物移動台車
5か月前
個人
サドル揺動装置
10か月前
個人
二輪バイク補助輪
11か月前
井関農機株式会社
作業機
8か月前
個人
車両用横転防止装置
6か月前
井関農機株式会社
作業機
6か月前
個人
自転車用荷台
2か月前
日本精機株式会社
表示装置
8か月前
個人
クリアレインシェード
5か月前
井関農機株式会社
作業車両
3か月前
三甲株式会社
保護具
6か月前
個人
スライドレインプルーフ
4か月前
株式会社クラベ
面状ユニット
4か月前
株式会社北誠商事
被覆構造体
7か月前
株式会社ホシプラ
台車
5か月前
個人
ステアリングの操向部材
1か月前
帝人株式会社
車両構造体
4か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ