TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024132274
公報種別
公開特許公報(A)
公開日
2024-09-30
出願番号
2023042996
出願日
2023-03-17
発明の名称
車両制御装置
出願人
株式会社アイシン
代理人
弁理士法人酒井国際特許事務所
主分類
B62D
6/00 20060101AFI20240920BHJP(鉄道以外の路面車両)
要約
【課題】車両を目標経路に沿って走行させる場合の経路追従性を向上させる。
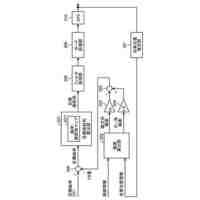
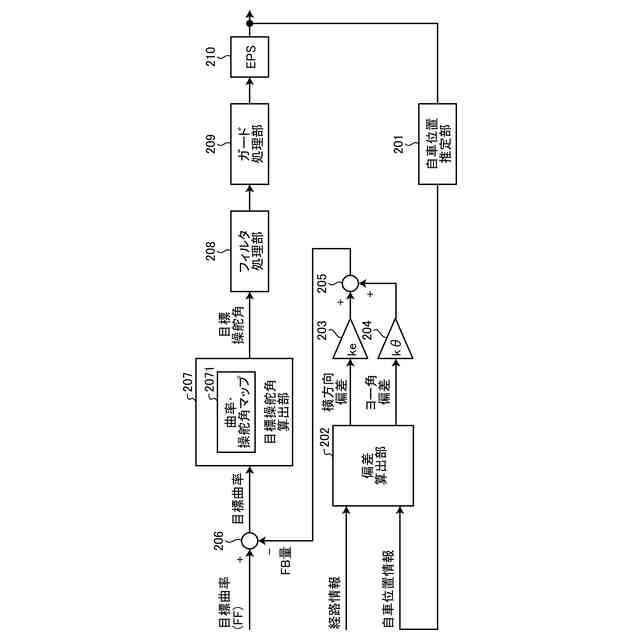
【解決手段】車両を目標経路に沿って走行させる車両制御装置は、現在から所定時間だけ後の車両の位置を推定して推定位置を出力する車両位置推定部と、目標経路および推定位置に基づいて、車両の実ヨー角と目標経路に対応する目標ヨー角の偏差であるヨー角偏差を算出するヨー角偏差算出部と、目標経路および推定位置に基づいて、車両の実横方向位置と目標経路に対応する目標横方向位置の偏差である横方向偏差を算出する横方向偏差算出部と、目標経路に基づく目標曲率と、ヨー角偏差と、横方向偏差と、に基づいて、目標操舵角を算出する目標操舵角算出部と、車両を走行させるときに、目標操舵角に基づいて操舵を制御する制御部と、を備える。
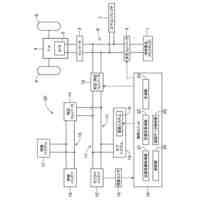
【選択図】図7
特許請求の範囲
【請求項1】
車両を目標経路に沿って走行させる車両制御装置であって、
現在から所定時間だけ後の前記車両の位置を推定して推定位置を出力する車両位置推定部と、
前記目標経路および前記推定位置に基づいて、前記車両の実ヨー角と前記目標経路に対応する目標ヨー角の偏差であるヨー角偏差を算出するヨー角偏差算出部と、
前記目標経路および前記推定位置に基づいて、前記車両の実横方向位置と前記目標経路に対応する目標横方向位置の偏差である横方向偏差を算出する横方向偏差算出部と、
前記目標経路に基づく目標曲率と、前記ヨー角偏差と、前記横方向偏差と、に基づいて、目標操舵角を算出する目標操舵角算出部と、
前記車両を走行させるときに、前記目標操舵角に基づいて操舵を制御する制御部と、を備える車両制御装置。
続きを表示(約 310 文字)
【請求項2】
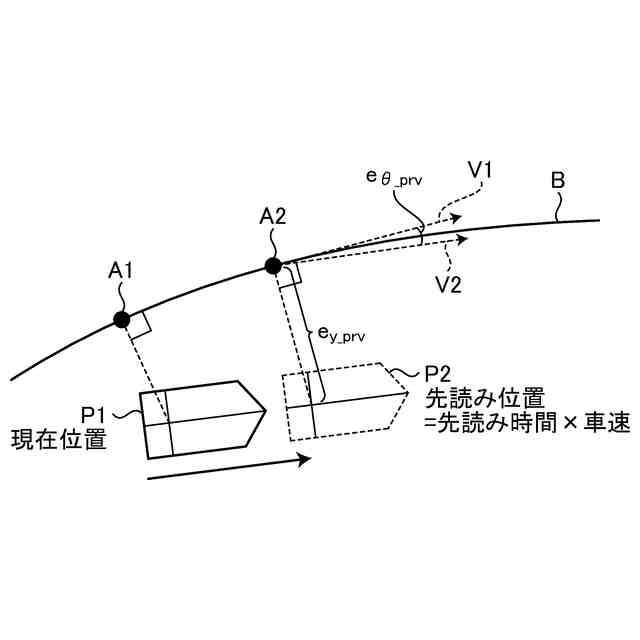
前記車両位置推定部は、前記車両の現在位置と、前記車両の移動速度および移動方向と、に基づいて、現在から前記所定時間だけ後の前記車両の位置を推定して前記推定位置を出力する、請求項1に記載の車両制御装置。
【請求項3】
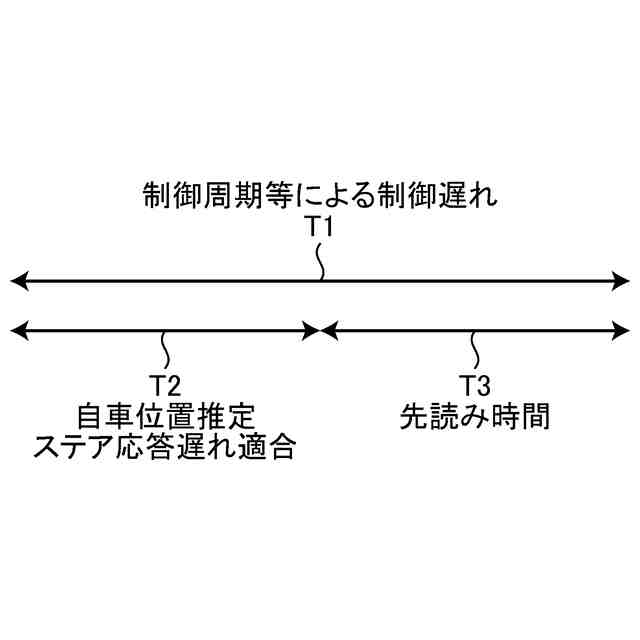
前記車両の前記現在位置は、前記車両の自車位置推定部のステア応答遅れ適合時間を予め考慮して算出されており、
前記車両位置推定部は、前記ステア応答遅れ適合時間が大きいほど、前記所定時間として小さな値を用いる、請求項2に記載の車両制御装置。
【請求項4】
前記車両位置推定部は、前記移動速度として、目標車速を用いる、請求項2に記載の車両制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、車両制御装置に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
従来から、車両を目標経路に沿って走行させる技術の開発が進められている。その技術では、車両がカーブ走行する場合、例えば、目標経路に基づく目標曲率を用いたFF(フィードフォワード)制御を行うとともに、車両の横方向偏差とヨー角偏差を用いたFB(フィードバック)制御を行う。
【先行技術文献】
【特許文献】
【0003】
特開2017-30482号公報
特開2016-199080号公報
特開2018-39293号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述の従来技術では、車両の経路追従性が良くない場合がある。理由の1つとしては、制御周期やCAN(Controller Area Network)周期などによる制御遅れによって、横方向偏差とヨー角偏差を用いたFB制御が遅れていることが考えられる。
【0005】
そこで、本発明は、上記事情に鑑みてなされたものであり、車両を目標経路に沿って走行させる場合の経路追従性を向上させることができる車両制御装置を提供することを目的としている。
【課題を解決するための手段】
【0006】
上記課題を解決するために、実施形態の車両制御装置は、車両を目標経路に沿って走行させる車両制御装置であって、現在から所定時間だけ後の前記車両の位置を推定して推定位置を出力する車両位置推定部と、前記目標経路および前記推定位置に基づいて、前記車両の実ヨー角と前記目標経路に対応する目標ヨー角の偏差であるヨー角偏差を算出するヨー角偏差算出部と、前記目標経路および前記推定位置に基づいて、前記車両の実横方向位置と前記目標経路に対応する目標横方向位置の偏差である横方向偏差を算出する横方向偏差算出部と、前記目標経路に基づく目標曲率と、前記ヨー角偏差と、前記横方向偏差と、に基づいて、目標操舵角を算出する目標操舵角算出部と、前記車両を走行させるときに、前記目標操舵角に基づいて操舵を制御する制御部と、を備える。
【0007】
上記構成によれば、現在から所定時間だけ後の車両の推定位置に基づいてヨー角偏差と横方向偏差を算出し、それらを用いて目標操舵角を算出することで、車両の経路追従性を向上させることができる。
【0008】
また、車両制御装置において、前記車両位置推定部は、前記車両の現在位置と、前記車両の移動速度および移動方向と、に基づいて、現在から前記所定時間だけ後の前記車両の位置を推定して前記推定位置を出力する。
【0009】
上記構成によれば、具体的に、車両の現在位置と、車両の移動速度および移動方向と、に基づいて、現在から所定時間だけ後の車両の位置を推定することができる。
【0010】
また、車両制御装置において、前記車両の前記現在位置は、前記車両の自車位置推定部のステア応答遅れ適合時間を予め考慮して算出されており、前記車両位置推定部は、前記ステア応答遅れ適合時間が大きいほど、前記所定時間として小さな値を用いる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社アイシン
便座装置
21日前
株式会社アイシン
制御装置
17日前
株式会社アイシン
粉砕装置
18日前
株式会社アイシン
車両駆動装置
25日前
株式会社アイシン
車両駆動装置
24日前
株式会社アイシン
冷却システム
3日前
株式会社アイシン
車両駆動装置
25日前
株式会社アイシン
マニホールド
11日前
株式会社アイシン
車載充電装置
1か月前
株式会社アイシン
車載充電装置
1か月前
株式会社アイシン
車載充電装置
1か月前
株式会社アイシン
温度管理装置
1か月前
株式会社アイシン
車両制御装置
今日
株式会社アイシン
車両制御装置
今日
株式会社アイシン
シート駆動装置
24日前
株式会社アイシン
車両用駆動装置
10日前
株式会社アイシン
車両用駆動装置
1か月前
株式会社アイシン
車両用駆動装置
6日前
株式会社アイシン
モータ制御装置
今日
株式会社アイシン
車両用駆動装置
今日
株式会社アイシン
車両用ドア装置
18日前
株式会社アイシン
車両用ドア装置
18日前
株式会社アイシン
電源モジュール
今日
株式会社アイシン
車両用駆動装置
1か月前
株式会社アイシン
運転制御システム
10日前
株式会社アイシン
充電提案システム
10日前
株式会社アイシン
重畳画像表示装置
24日前
株式会社アイシン
バッテリ冷却装置
10日前
株式会社アイシン
ステアリング装置
17日前
株式会社アイシン
観光案内システム
24日前
株式会社アイシン
冷媒マニホールド
3日前
株式会社アイシン
情報提供システム
28日前
株式会社アイシン
回転電機駆動装置
今日
株式会社アイシン
自車位置検出装置
今日
株式会社アイシン
圧入部品交換方法
今日
株式会社アイシン
回転電機用ロータ
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ