TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024126904
公報種別
公開特許公報(A)
公開日
2024-09-20
出願番号
2023035651
出願日
2023-03-08
発明の名称
操舵制御装置および操舵制御方法
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
,
個人
主分類
B62D
6/00 20060101AFI20240912BHJP(鉄道以外の路面車両)
要約
【課題】前輪および後輪の転舵角を逆相にして旋回する際に乗員の違和感を低減する技術を提供する。
【解決手段】操舵制御装置は、車速および前輪舵角を取得する取得部と、車速および前輪舵角をもとに後輪舵角を導出する導出部と、前輪舵角に応じて前輪転舵装置を制御するとともに、導出された後輪舵角に応じて後輪転舵装置を制御する制御部と、を備える。導出部は、前輪舵角と後輪舵角を逆相にして車両を旋回する際に車両の基準位置の旋回半径と後輪車軸の中心位置の旋回半径を同じにするように後輪舵角を導出する。基準位置は、重心位置または前輪車軸の中心位置と後輪車軸の中心位置との間の位置に設定される。
【選択図】図1
特許請求の範囲
【請求項1】
車速および前輪舵角を取得する取得部と、
車速および前記前輪舵角をもとに後輪舵角を導出する導出部と、
前記前輪舵角に応じて前輪転舵装置を制御するとともに、導出された前記後輪舵角に応じて後輪転舵装置を制御する制御部と、を備え、
前記導出部は、前輪舵角と後輪舵角を逆相にして車両を旋回する際に前記車両の基準位置の旋回半径と後輪車軸の中心位置の旋回半径を同じにするように前記後輪舵角を導出し、
前記基準位置は、重心位置または前輪車軸の中心位置と前記後輪車軸の中心位置との間の位置に設定されることを特徴とする操舵制御装置。
続きを表示(約 720 文字)
【請求項2】
前記導出部は、前輪舵角と後輪舵角の関係を示す比例ゲインを用いて導出し、
前記比例ゲインは、前記車両の基準位置の旋回半径と後輪車軸の中心位置の旋回半径を同じにする関係を満たすことを特徴とする請求項1に記載の操舵制御装置。
【請求項3】
前記導出部は、前記比例ゲインに加えて車速ゲインを用いて前輪舵角から後輪舵角を導出し、
前記車速ゲインは、所定車速以上の領域において車速が大きくなるにつれて、前記比例ゲインによって導出された後輪舵角を大きくするように定められることを特徴とする請求項2に記載の操舵制御装置。
【請求項4】
乗員の乗車位置を検出する乗車位置検出部を備え、
前記導出部は、乗員の乗車位置をもとに前記基準位置を可変に設定することを特徴とする請求項1に記載の操舵制御装置。
【請求項5】
コンピュータによって各ステップを実行する操舵制御方法であって、
車速および前輪舵角を取得するステップと、
車速および前記前輪舵角をもとに後輪舵角を導出するステップと、
前記前輪舵角に応じて前輪転舵装置を制御するとともに、導出された前記後輪舵角に応じて後輪転舵装置を制御するステップと、を含み、
前記導出するステップにおいて、前記前輪舵角と前記後輪舵角を逆相にして車両を旋回する際に前記車両の基準位置の旋回半径と後輪車軸の中心位置の旋回半径を同じにするように前記後輪舵角を導出し、
前記基準位置は、重心位置または前輪車軸の中心位置と前記後輪車軸の中心位置との間の位置に設定されることを特徴とする操舵制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、四輪操舵可能な操舵制御の技術に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
特許文献1には、走行状態に応じて後輪操舵を行う4WSコントロールユニットを備えた後輪操舵装置が開示されている。この後輪操舵装置は、運転者に車体の左右後方をそれぞれ表示する左右サイドミラーと、4WSモード時、ステアリング操舵角に応じて左右サイドミラーの表示位置を下方側へ変更する表示位置変更手段と、を備える。
【先行技術文献】
【特許文献】
【0003】
特開2006-182160号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に開示される技術では、四輪操舵を実行する際に前輪と後輪の転舵角を逆相にすると、旋回状態によっては乗員が二輪操舵と比べて違和感を持つおそれがある。
【0005】
本発明の目的は、前輪および後輪の転舵角を逆相にして旋回する際に乗員の違和感を低減する技術を提供することにある。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本発明のある態様の操舵制御装置は、車速および前輪舵角を取得する取得部と、車速および前輪舵角をもとに後輪舵角を導出する導出部と、前輪舵角に応じて前輪転舵装置を制御するとともに、導出された後輪舵角に応じて後輪転舵装置を制御する制御部と、を備える。導出部は、前輪舵角と後輪舵角を逆相にして車両を旋回する際に車両の基準位置の旋回半径と後輪車軸の中心位置の旋回半径を同じにするように後輪舵角を導出する。基準位置は、重心位置または前輪車軸の中心位置と後輪車軸の中心位置との間の位置に設定される。
【0007】
本発明の別の態様は、コンピュータによって各ステップを実行する操舵制御方法である。この方法は、車速および前輪舵角を取得するステップと、車速および前輪舵角をもとに後輪舵角を導出するステップと、前輪舵角に応じて前輪転舵装置を制御するとともに、導出された後輪舵角に応じて後輪転舵装置を制御するステップと、を含む。導出するステップにおいて、前輪舵角と後輪舵角を逆相にして車両を旋回する際に車両の基準位置の旋回半径と後輪車軸の中心位置の旋回半径を同じにするように後輪舵角を導出する。基準位置は、重心位置または前輪車軸の中心位置と後輪車軸の中心位置との間の位置に設定される。
【発明の効果】
【0008】
本発明によれば、前輪および後輪の転舵角を逆相にして旋回する際に乗員の違和感を低減する技術を提供できる。
【図面の簡単な説明】
【0009】
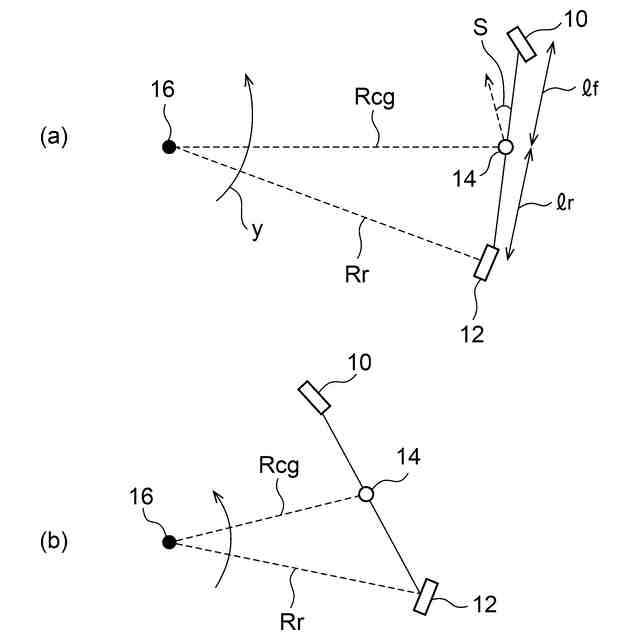
図1(a)は、実施例の操舵制御システムの概要を説明するための図であり、図1(b)は、比較技術の操舵制御を説明するための図である。
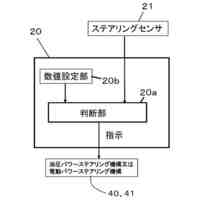
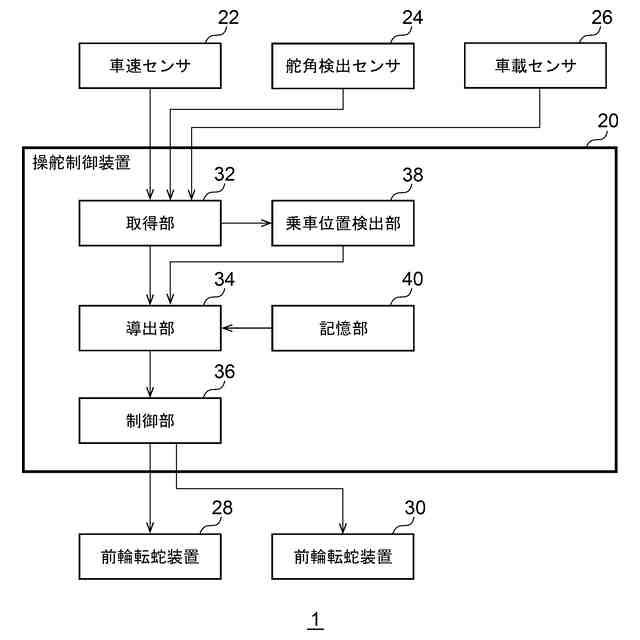
操舵制御システムの機能構成を示す図である。
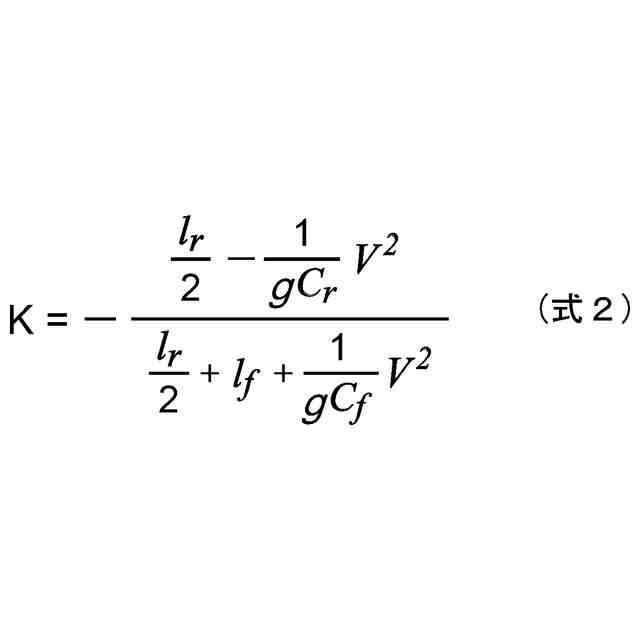
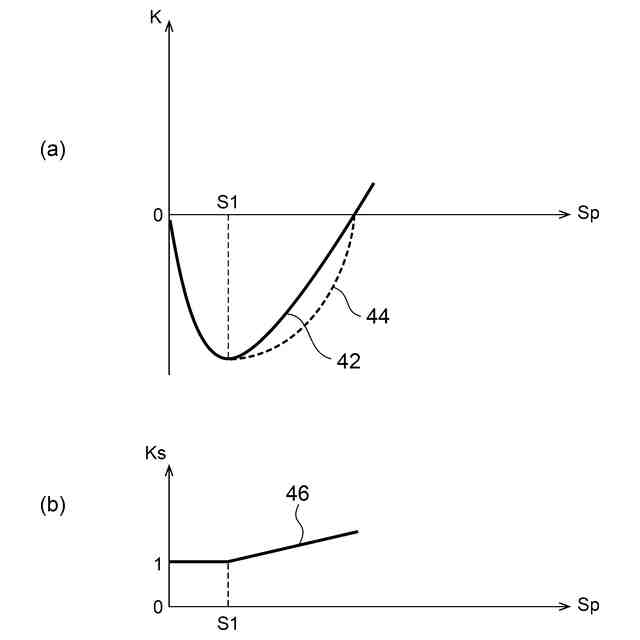
図3(a)は、比例ゲインと車速の関係を示す図である。
基準位置の旋回半径と後輪の旋回半径を同じにする後輪舵角の制御について説明するための図である。
【発明を実施するための形態】
【0010】
図1(a)は、実施例の操舵制御システムの概要を説明するための図であり、図1(b)は、比較技術の操舵制御を説明するための図である。実施例の操舵制御システムは、車両に設けられ、車両は前輪10および後輪12を個別に操舵可能、すなわち四輪操舵可能に設けられる。なお、車両が四輪操舵機能をオン/オフすることが可能であってよい。また、車両は自律的に走行可能な自動運転機能を有してよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
自転車の傘
10か月前
個人
サドル揺動装置
12か月前
個人
重量物移動台車
7か月前
個人
自転車用傘捕捉具
19日前
個人
自転車用荷台
3か月前
個人
車両用横転防止装置
8か月前
井関農機株式会社
作業機
8か月前
井関農機株式会社
作業機
10か月前
個人
アタッチメント
20日前
個人
自転車用荷物台
3日前
三甲株式会社
保護具
8か月前
井関農機株式会社
作業車両
5か月前
個人
クリアレインシェード
7か月前
日本精機株式会社
表示装置
9か月前
個人
ステアリングの操向部材
3か月前
株式会社クラベ
面状ユニット
6か月前
株式会社北誠商事
被覆構造体
9か月前
株式会社CPM
駐輪機
26日前
株式会社ホシプラ
台車
7か月前
個人
スライドレインプルーフ
6か月前
三甲株式会社
台車
10か月前
三甲株式会社
台車
8か月前
三甲株式会社
台車
2か月前
三甲株式会社
台車
2か月前
祖峰企画株式会社
平台車
4か月前
帝人株式会社
車両構造体
6か月前
井関農機株式会社
作業車両
10か月前
豊田合成株式会社
ハンドル
6か月前
豊田合成株式会社
操舵装置
1か月前
ヤマハ発動機株式会社
車両
1か月前
ヤマハ発動機株式会社
車両
1か月前
ヤマハ発動機株式会社
車両
1か月前
ヤマハ発動機株式会社
車両
1か月前
豊田合成株式会社
ハンドル
10か月前
井関農機株式会社
走行車両
8か月前
個人
足踏みペダル式自転車
6か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ