TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024126739
公報種別
公開特許公報(A)
公開日
2024-09-20
出願番号
2023035334
出願日
2023-03-08
発明の名称
表面処理方法
出願人
セイコーエプソン株式会社
代理人
個人
,
個人
,
個人
主分類
B41J
2/01 20060101AFI20240912BHJP(印刷;線画機;タイプライター;スタンプ)
要約
【課題】ワークの所望位置に高精度に表面処理を行う。
【解決手段】立体的なワークを固定するための固定部とマーカーとを有するワークトレイと、ワーク移動機構と、表面処理機構と、3次元カメラと、を用いた表面処理方法は、固定部によって互いの位置関係が固定されたワークおよびマーカーを3次元カメラによって撮像することにより、第1座標系の第1形状データを取得する第1ステップと、第1形状データの示すマーカーの形状に基づいて第1形状データをワークトレイに対応付けられた第2座標系の第2形状データに変換する第2ステップと、ワーク移動機構がワークトレイの少なくとも一部を支持した状態で第2形状データに基づいてワーク移動機構を動作させる第3ステップと、第2形状データに基づいて表面処理機構を動作させる第4ステップと、をこの順に含む。
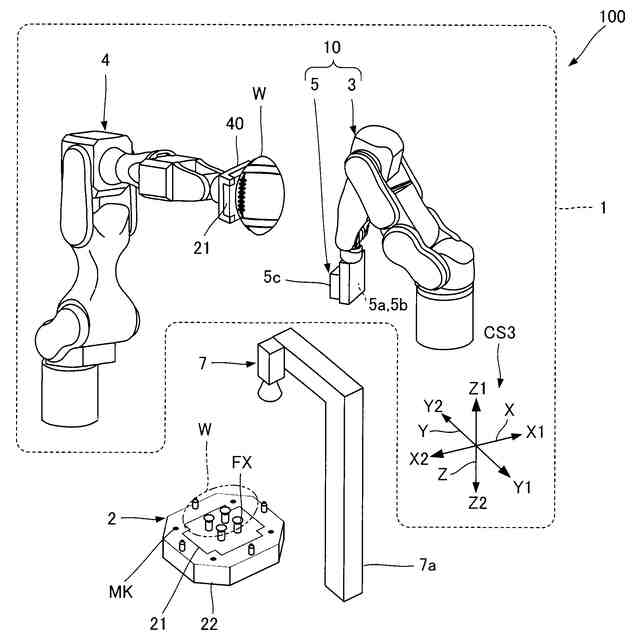
【選択図】図1
特許請求の範囲
【請求項1】
立体的なワークを固定するための固定部とマーカーとを有するワークトレイと、前記ワークトレイの少なくとも一部を支持するワーク移動機構と、前記ワークの表面を処理する表面処理機構と、3次元的な形状データを取得可能な3次元カメラと、を用いた表面処理方法であって、
前記固定部によって前記ワークトレイおよび前記ワークの互いの位置関係が固定された状態で、前記ワークおよび前記マーカーを前記3次元カメラによって撮像することにより、前記3次元カメラによって規定される第1座標系における前記ワークおよび前記マーカーの形状を示す第1形状データを取得する第1ステップと、
前記第1形状データの示す前記マーカーの形状に基づいて、前記第1形状データを、前記ワークトレイに対応付けられた第2座標系における前記ワークおよび前記マーカーの形状を示す第2形状データに変換する第2ステップと、
前記ワーク移動機構が前記ワークトレイの少なくとも一部を支持した状態で、前記第2形状データに基づいて、前記ワーク移動機構を動作させることにより、前記ワークの位置を調整する第3ステップと、
前記第2形状データに基づいて、前記表面処理機構を動作させることにより、前記ワークに対する表面処理を実行する第4ステップと、をこの順に含む、
ことを特徴とする表面処理方法。
続きを表示(約 1,000 文字)
【請求項2】
前記第2形状データに基づいて、前記ワーク上の表面処理を実行すべき領域に関するデータである処理領域データを生成する第5ステップを前記第2ステップと前記第3ステップとの間に含み、
前記第3ステップにおける前記ワーク移動機構の動作と、前記第4ステップにおける前記表面処理機構の動作と、のそれぞれは、前記処理領域データに基づいて実行される、
ことを特徴とする請求項1に記載の表面処理方法。
【請求項3】
前記第4ステップにおける前記表面処理機構の動作を規定する経路データを前記第2形状データと前記処理領域データとの両方に基づいて生成する第6ステップを前記第5ステップと前記第3ステップとの間に含み、
前記第4ステップにおける前記表面処理機構の動作は、前記経路データに基づいて実行される、
ことを特徴とする請求項2に記載の表面処理方法。
【請求項4】
前記経路データおよび前記処理領域データのうちの一方または両方と、前記表面処理機構の動作において基準となる位置に関するデータである基準位置データと、に基づいて、前記第3ステップにおける前記ワーク移動機構の動作を規定する位置調整データを生成する第7ステップを前記第6ステップと前記第3ステップとの間に含み、
前記第3ステップにおける前記ワーク移動機構の動作は、前記位置調整データに基づいて実行される、
ことを特徴とする請求項3に記載の表面処理方法。
【請求項5】
前記ワークトレイは、
前記固定部が設けられた第1トレイ部と、
前記マーカーが設けられた第2トレイ部と、を含み、
前記第1トレイ部と前記第2トレイ部とは、互いに着脱可能に固定され、
前記第3ステップおよび前記第4ステップのそれぞれでは、前記第2トレイ部を用いずに前記第1トレイ部を用いる、
ことを特徴とする請求項1に記載の表面処理方法。
【請求項6】
前記表面処理機構は、
複数のノズルから液体を噴射するヘッドと、
前記ヘッドを移動するヘッド移動機構と、を備え、
前記第4ステップにおいて、前記ヘッドは、前記経路データに基づく前記ヘッド移動機構の動作によって、前記ワークの表面に対して所定の間隔を保って走査される、
ことを特徴とする請求項3に記載の表面処理方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、表面処理方法に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
従来、立体的なワークの表面に印刷、研磨または塗装等の表面処理を行う表面処理方法が知られている。例えば、特許文献1に記載の技術は、多関節ロボットを用いて、インクジェット方式によりインクを吐出するヘッドを立体的なワークの表面に対して移動させながら印刷を行う。特許文献1では、ワークの3次元形状を示すCAD(computer-aided design)データに基づいて生成された経路データに基づいて、多関節ロボットがヘッドを移動させる。
【先行技術文献】
【特許文献】
【0003】
特開2022-149092号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の技術では、ワークのCADデータが存在しない場合、経路データを生成することが難しい。また、ワークのCADデータが存在したとしても、ワークの製造誤差等により、実際のワークの形状がCADデータの示す形状と異なる場合があったり、ワークの設置時の位置および姿勢の誤差が生じる場合があったりする。これらの場合、特許文献1に記載の技術では、ワーク上の所望位置に正確に印刷することが難しいという問題がある。
【課題を解決するための手段】
【0005】
以上の課題を解決するために、本開示の表面処理方法の一態様は、立体的なワークを固定するための固定部とマーカーとを有するワークトレイと、前記ワークトレイの少なくとも一部を支持するワーク移動機構と、前記ワークの表面を処理する表面処理機構と、3次元的な形状データを取得可能な3次元カメラと、を用いた表面処理方法であって、前記固定部によって前記ワークトレイおよび前記ワークの互いの位置関係が固定された状態で、前記ワークおよび前記マーカーを前記3次元カメラによって撮像することにより、前記3次元カメラによって規定される第1座標系を用いて前記ワークおよび前記マーカーの形状を示す第1形状データを取得する第1ステップと、前記第1形状データの示す前記マーカーの形状に基づいて、前記第1形状データを、前記ワークトレイに対応付けられた第2座標系を用いて前記ワークおよび前記マーカーの形状を示す第2形状データに変換する第2ステップと、前記ワーク移動機構が前記ワークトレイの少なくとも一部を支持した状態で、前記第2形状データに基づいて、前記ワーク移動機構を動作させることにより、前記ワークの位置を調整する第3ステップと、前記第2形状データに基づいて、前記表面処理機構を動作させることにより、前記ワークに対する表面処理を実行する第4ステップと、をこの順に含む。
【図面の簡単な説明】
【0006】
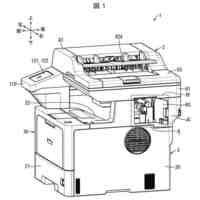
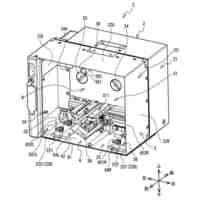
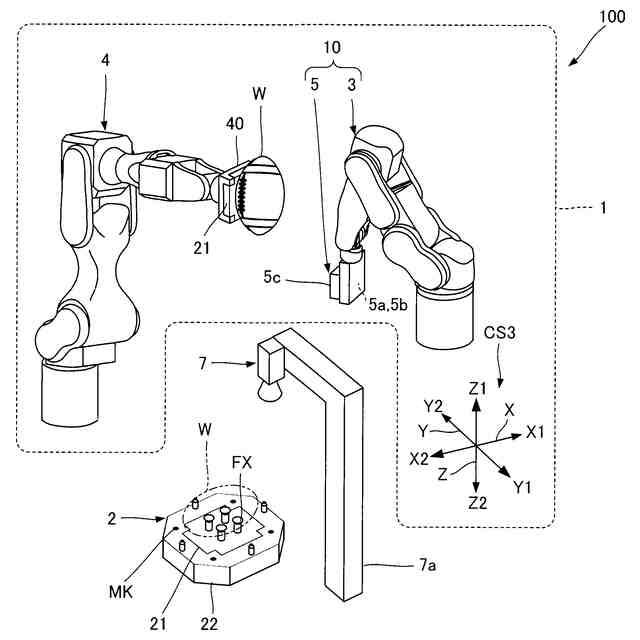
実施形態に係る表面処理方法に用いるシステムの概略を示す斜視図である。
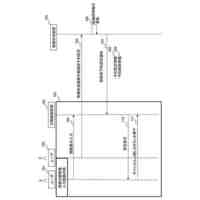
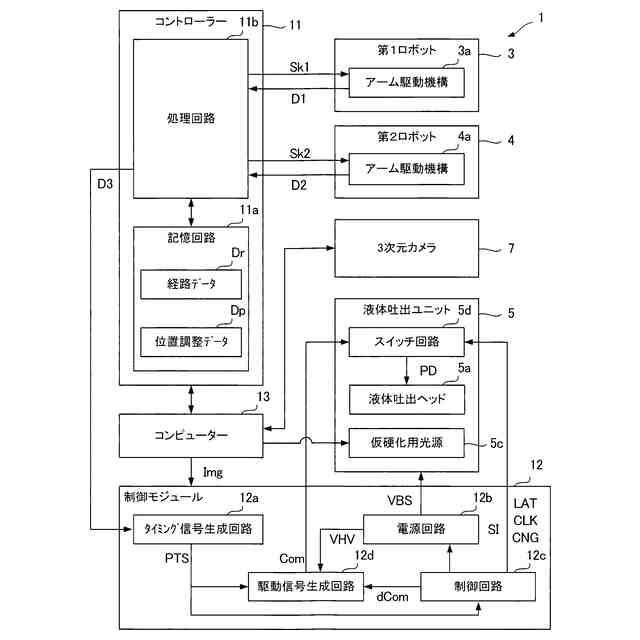
実施形態に係る表面処理方法に用いるシステムの電気的な構成を示すブロック図である。
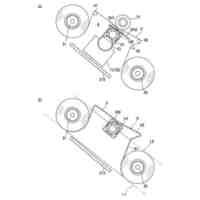
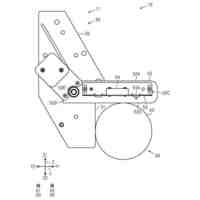
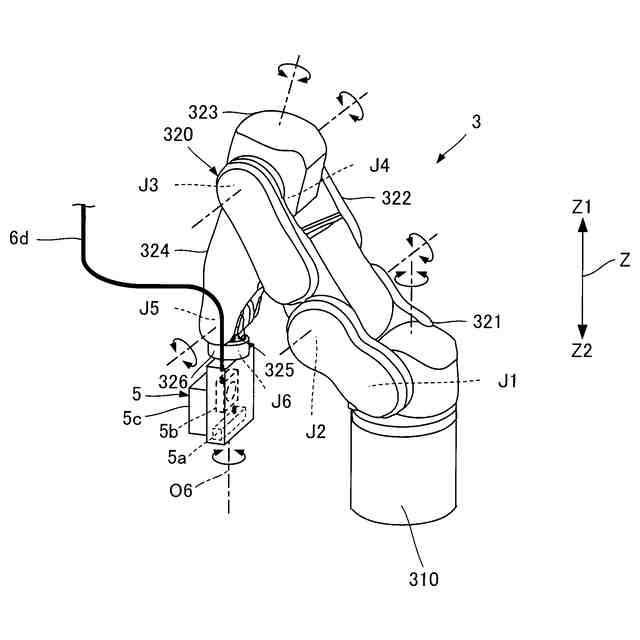
ヘッド移動機構の斜視図である。
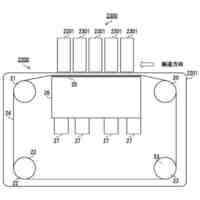
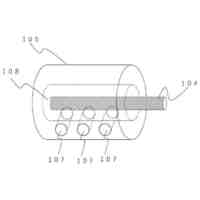
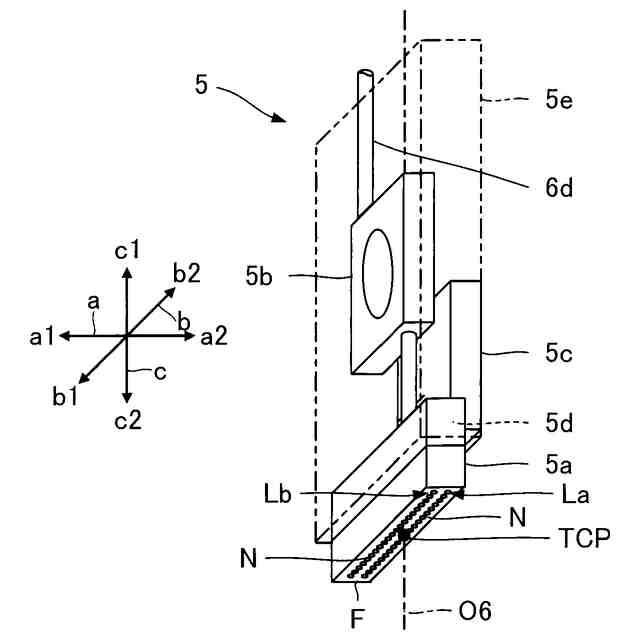
ヘッドユニットの概略構成を示す斜視図である。
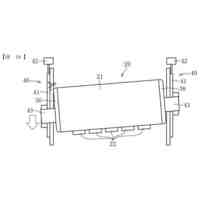
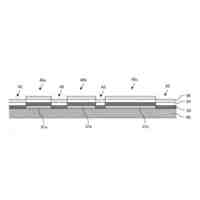
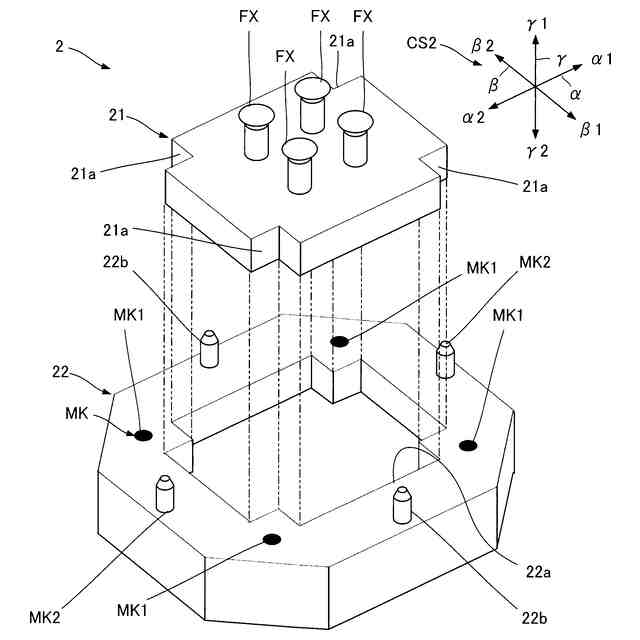
ワークトレイの斜視図である。
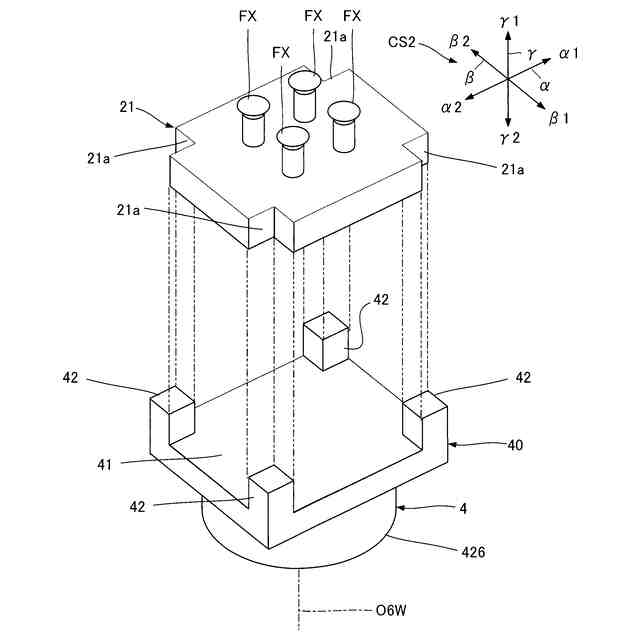
ワーク移動機構に対して第1トレイ部を取り付けるための治具を説明するための図である。
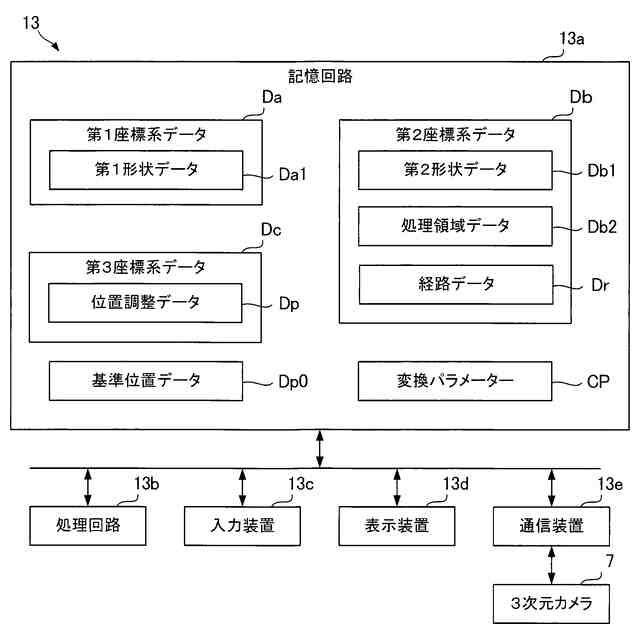
経路データおよび位置調整データの生成に用いるコンピューターを示す図である。
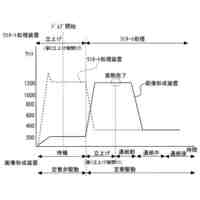
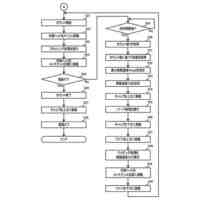
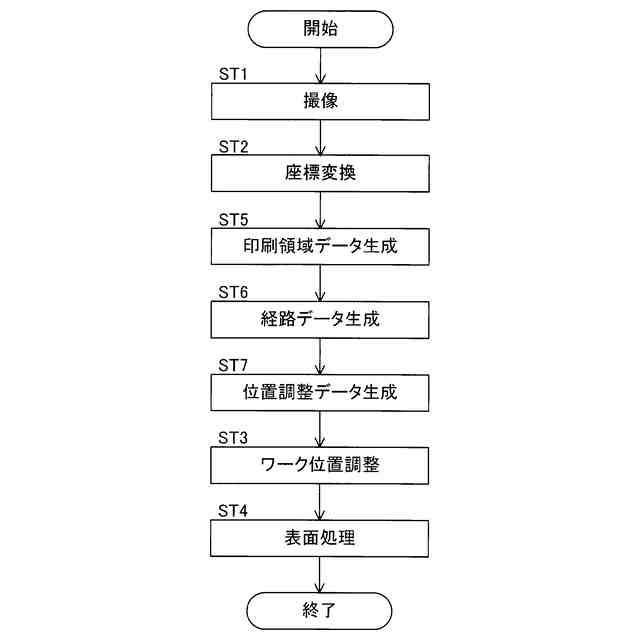
実施形態に係る表面処理方法を示すフローチャートである。
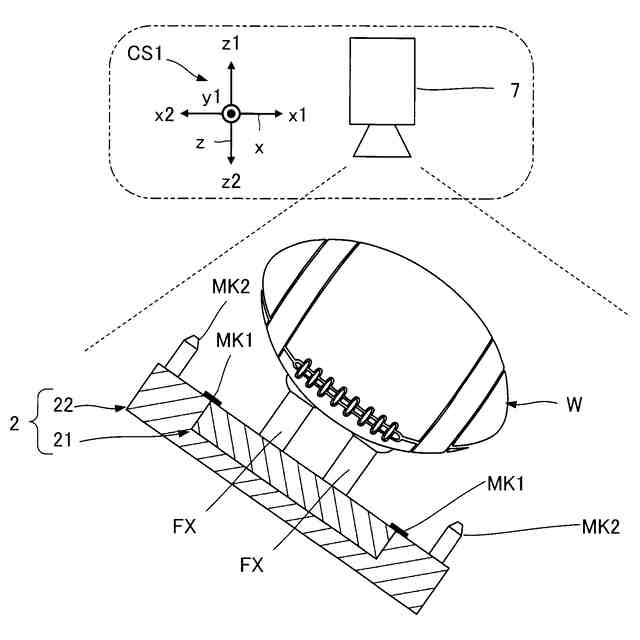
第1ステップにおける第1形状データの取得を説明するための図である。
第2ステップにおける第2形状データの生成を説明するための図である。
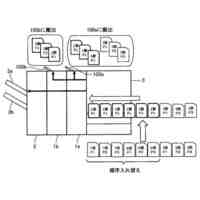
第5ステップにおける処理領域データの生成を説明するための図である。
第6ステップにおける経路データの生成を説明するための図である。
第6ステップにおける経路データの生成を説明するための図である。
第7ステップにおける位置調整データの生成を説明するための図である。
第3ステップにおけるワーク位置の調整と第4ステップにおける表面処理とを説明するための図である。
【発明を実施するための形態】
【0007】
以下、添付図面を参照しながら本開示に係る好適な実施形態を説明する。なお、図面において各部の寸法および縮尺は実際と適宜に異なり、理解を容易にするために模式的に示している部分もある。また、本開示の範囲は、以下の説明において特に本開示を限定する旨の記載がない限り、これらの形態に限られない。
【0008】
以下の説明は、便宜上、互いに交差するX軸、Y軸およびZ軸を適宜に用いて行う。また、以下では、X軸に沿う一方向がX1方向であり、X1方向と反対の方向がX2方向である。同様に、Y軸に沿って互いに反対の方向がY1方向およびY2方向である。また、Z軸に沿って互いに反対の方向がZ1方向およびZ2方向である。
【0009】
ここで、X軸、Y軸およびZ軸は、後述のヘッド移動機構3およびワーク移動機構4を含む印刷装置1が設置される空間に設定されるワールド座標系の座標軸である。典型的には、Z軸が鉛直な軸であり、Z2方向が鉛直方向での下方向に相当する。ヘッド移動機構3およびワーク移動機構4のそれぞれの基部を基準とするベース座標系は、キャリブレーションにより当該ワールド座標系に対応付けられる。以下では、便宜上、ワールド座標系をロボット座標系として用いてヘッド移動機構3およびワーク移動機構4のそれぞれの動作を制御する場合が例示される。以下では、当該ロボット座標系を第3座標系CS3という場合がある。
【0010】
なお、Z軸は、鉛直な軸でなくともよい。また、X軸、Y軸およびZ軸は、典型的には互いに直交するが、これに限定されず、直交しない場合もある。例えば、X軸、Y軸およびZ軸が80°以上100°以下の範囲内の角度で互いに交差すればよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
東レ株式会社
凸版印刷版原版
10日前
三菱製紙株式会社
感熱記録材料
1か月前
ブラザー工業株式会社
印刷装置
2か月前
独立行政法人 国立印刷局
印刷物
2か月前
三菱製紙株式会社
直接感熱記録材料
2か月前
フジコピアン株式会社
熱転写シート
1か月前
ブラザー工業株式会社
画像形成装置
2か月前
フジコピアン株式会社
中間転写シート
5日前
ブラザー工業株式会社
印刷装置
2か月前
ブラザー工業株式会社
印刷装置
2か月前
キヤノン株式会社
印刷制御装置
10日前
ブラザー工業株式会社
印刷装置
2か月前
ブラザー工業株式会社
プリンタ
2か月前
キヤノン株式会社
画像形成装置
17日前
フジコピアン株式会社
熱転写記録媒体
1か月前
キヤノン株式会社
画像形成装置
1か月前
株式会社リコー
画像形成システム
1か月前
株式会社リコー
画像形成システム
1か月前
イーデーエム株式会社
プリンタ装置
11日前
キヤノン株式会社
印刷制御システム
23日前
ブラザー工業株式会社
プリンタ
2か月前
ブラザー工業株式会社
箔転写装置
2か月前
ブラザー工業株式会社
箔転写装置
1か月前
沖電気工業株式会社
画像形成装置
1か月前
株式会社リコー
液体吐出装置
4日前
株式会社リコー
加熱装置及び液体吐出装置
1か月前
日本製紙株式会社
インクジェット記録用紙
2か月前
ブラザー工業株式会社
液体吐出装置
2か月前
株式会社リコー
液体吐出装置及び印刷方法
17日前
理想科学工業株式会社
加飾装置および方法
1か月前
セイコーエプソン株式会社
記録装置
10日前
大日本印刷株式会社
物品の製造方法
2か月前
ブラザー工業株式会社
画像記録装置
2か月前
ブラザー工業株式会社
画像記録装置
2か月前
株式会社コムラテック
印刷版
1か月前
独立行政法人 国立印刷局
排出孔を設けた番号器
2か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ