TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024121802
公報種別
公開特許公報(A)
公開日
2024-09-06
出願番号
2024023273
出願日
2024-02-19
発明の名称
搬送アシスト装置
出願人
リーフ株式会社
,
大成建設株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
B62B
3/00 20060101AFI20240830BHJP(鉄道以外の路面車両)
要約
【課題】搬送時以外、人手で簡単に移動できる搬送アシスト装置を提供する。
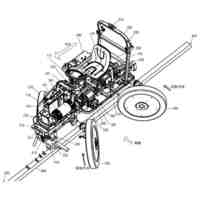
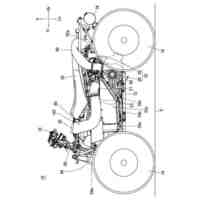
【解決手段】本発明の搬送アシスト装置において、装置本体部1、及び、装置側係合部4を含み、装置側係合部4は、搬送物の側面側と係合可能であり、装置本体部1は、駆動部11、従動部12及び昇降部14を含み、駆動部11は、駆動輪111を含み、従動部12は、従動輪121を含み、昇降部14は、搬送物の搬送アシスト時には、駆動輪111を下降させて接地状態とし、搬送物の非搬送アシスト時には、駆動輪111を上昇させて非接地状態とし、かつ、従動輪121を下降させて接地状態とする。
【選択図】 図2
特許請求の範囲
【請求項1】
装置本体部、及び、装置側係合部を含み、
前記装置側係合部は、搬送物の側面側と係合可能であり、
前記装置本体部は、駆動部、従動部及び昇降部を含み、
前記駆動部は、駆動輪を含み、
前記従動部は、従動輪を含み、
前記昇降部は、前記搬送物の搬送アシスト時には、前記駆動輪を下降させて接地状態とし、前記搬送物の非搬送アシスト時には、前記駆動輪を上昇させて非接地状態とし、かつ、前記従動輪を下降させて接地状態とする、
搬送アシスト装置。
続きを表示(約 1,900 文字)
【請求項2】
前記装置側係合部は、前記装置本体部の進行方向に対する側面側に配置され、
さらに、制御部を含み、
前記制御部は、前記駆動部及び前記昇降部を制御し、
前記駆動部は、さらに、駆動モータを含み、
前記駆動モータに前記駆動輪が連結され、
前記駆動輪は、前記装置本体部の進行方向の前後に移動可能な推進力が発生可能なように前記装置本体部に配置され、
前記従動部の前記従動輪は、水平方向に回動可能な状態で前記装置本体部に配置され、
前記制御部により、前記昇降部による前記駆動輪及び前記従動輪の昇降が制御される、
請求項1記載の搬送アシスト装置。
【請求項3】
前記昇降部は、連結部材及び昇降装置を含み、
前記連結部材の一端は前記駆動輪と連結し、前記連結部材の他端は前記従動輪と連結し前記連結部材の前記一端及び前記他端の間の一部が、前記駆動輪及び前記従動輪が上下方向に昇降可能なように回動可能な状態で軸支され、
前記昇降装置は、前記駆動輪及び前記従動輪の少なくとも一方を昇降可能である、
請求項1記載の搬送アシスト装置。
【請求項4】
さらに、前記搬送物の取付治具を含み、
前記取付治具は、前記搬送物に取付可能であり、
前記取付治具は、治具側係合部を含み、
前記治具側係合部は、前記搬送物の側面側に配置され、かつ、前記装置側係合部と係合可能である、
請求項1記載の搬送アシスト装置。
【請求項5】
前記取付治具は、さらに、ガイド部を含み、
前記ガイド部は、前記装置側係合部を前記治具側係合部にガイド可能である、
請求項4記載の搬送アシスト装置。
【請求項6】
前記装置本体部は、さらに、直進補助輪を含み、
前記直進補助輪は、前記搬送物の搬送アシスト時において、接地状態であり、かつ、前記搬送物が前記装置本体部の進行方向の前後方向に移動している場合、前記直進補助輪の進行方向が、前記装置本体部の進行方向に固定されている、
請求項1記載の搬送アシスト装置。
【請求項7】
前記搬送物の旋回時において、前記直進補助輪は、前記固定が解除され、水平方向に回動可能である、
請求項6記載の搬送アシスト装置。
【請求項8】
前記装置本体部は、さらに、作用力検知センサを含み、
前記作用力検知センサは、前記搬送物に対する搬送者の作用力を検知して前記制御部に送信し、
前記制御部は、前記作用力に応じて前記駆動モータの回転駆動を制御する、
請求項2記載の搬送アシスト装置。
【請求項9】
前記制御部は、下記(a)、(b)、(c)、(d)、(e)、(f)及び(g)の少なくとも一つの制御を実施する、
請求項8記載の搬送アシスト装置。
(a)前記作用力検知センサが、前記搬送物の進行方向と同じ方向の作用力を検知した場合、前記搬送物が加速するための前記駆動モータの回転駆動の制御。
(b)前記搬送物の速度が、予め設定された速度に達した場合、前記搬送物が定速走行するための前記駆動モータの回転駆動の制御。
(c)前記作用力検知センサが、前記搬送物の進行方向と逆方向の作用力を検知した場合、前記搬送物が減速するための前記駆動モータの回転駆動の制御。
(d)前記作用力検知センサが、前記駆動輪が外回で前記搬送物を左右方向に旋回する作用力を検知した場合、前記搬送物が定速走行するための前記駆動モータの回転駆動の制御。
(e)前記作用力検知センサが、前記駆動輪が内回で前記搬送物を左右方向に旋回する作用力を検知した場合、前記搬送物が定速走行するための前記駆動モータの回転駆動の制御。
(f)前記搬送物が傾斜を上る場合、前記搬送物が定速走行するための前記駆動モータの回転駆動の制御。
(g)前記搬送物が傾斜を下る場合、前記搬送物が定速走行するための前記駆動モータの回転駆動の制御。
【請求項10】
さらに、操作センサを含み、
前記操作センサは、前記搬送物の操作ハンドルに取付可能であり、
前記操作センサは、前記搬送者の前記操作ハンドルの把持を検知可能であり、
前記制御部は、前記操作センサの前記把持を検知した場合、前記駆動モータを回転駆動させ、前記操作センサの前記把持を検知しない場合、前記駆動モータを回転駆動させない、
請求項9記載の搬送アシスト装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、搬送アシスト装置に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
病院では、患者を搬送する際、ベッドに患者を寝かせた状態で搬送する場合がある。ベッドに患者を寝かして搬送する際には、ベッドの進行方向前側でベッドを引張ながら操舵をする者と、ベッドの進行方向後側でベッドを押す者の最低二名が必要である。しかし、ベッド自体が重く、また患者も重い場合が多く、しかも搬送に携わるのは女性の看護師が多いため、二名で搬送するのは困難であり、通常、3~4名で搬送するが、大変な重労働であり、煩雑な作業となっている。この問題を解決するために、ベッドの搬送をアシストするベッド搬送装置が提案されている。例えば、特許文献1には、ベッド側面に結合し、駆動輪による駆動力により、ベッドを搬送するベッド搬送装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2019-141160号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、このベッド搬送装置では、駆動輪が常に接地しているため、ベッド搬送時以外でベッド搬送装置を移動する際も駆動輪を駆動させる必要があり、その結果、電力が消費されることになる。
【0005】
そこで、本発明は、ベッド搬送時以外において、駆動輪を使用することなく、移動可能な搬送アシスト装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
前記目的を達成するために、本発明の搬送アシスト装置は、
装置本体部、及び、装置側係合部を含み、
前記装置側係合部は、搬送物の側面側と係合可能であり、
前記装置本体部は、駆動部、従動部及び昇降部を含み、
前記駆動部は、駆動輪を含み、
前記従動部は、従動輪を含み、
前記昇降部は、前記搬送物の搬送アシスト時には、前記駆動輪を下降させて接地状態とし、前記搬送物の非搬送アシスト時には、前記駆動輪を上昇させて非接地状態とし、かつ、前記従動輪を下降させて接地状態とする、
装置である。
【発明の効果】
【0007】
本発明によれば、例えば、ベッド等の搬送時以外では、駆動輪が非接地状態となり、従動輪で移動できるため、例えば、看護師等の人力で移動可能となり、省電力となる。
【図面の簡単な説明】
【0008】
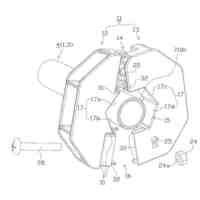
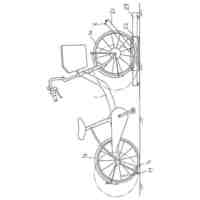
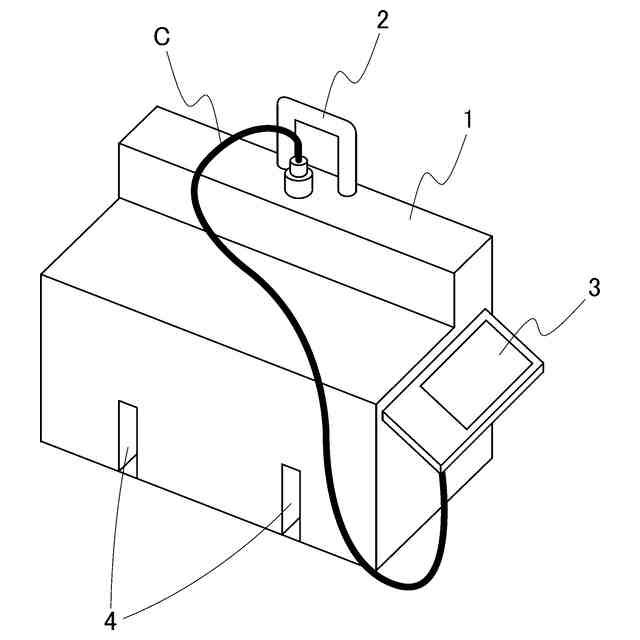
図1は、本発明の搬送アシスト装置の一例を示す斜視図である。
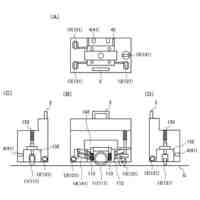
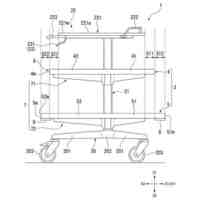
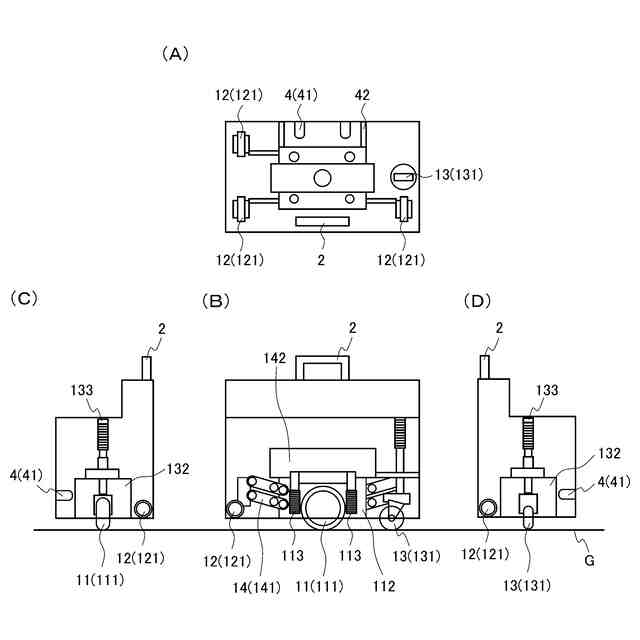
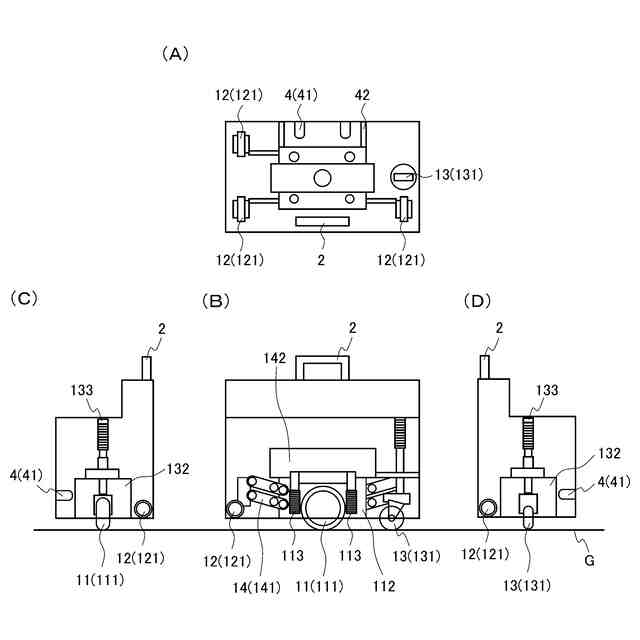
図2は、図1の搬送アシスト装置の構成の説明図であり、同図(A)は上面図、同図(B)は正面図、同図(C)は左側面図、同図(D)は右側面図である。
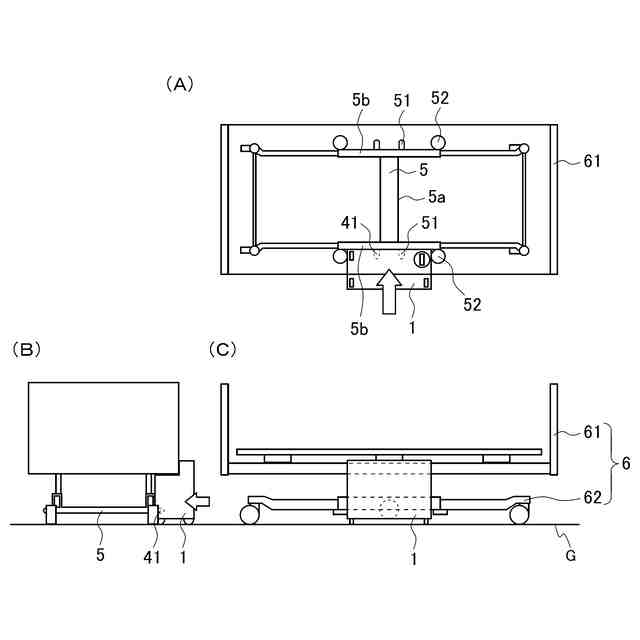
図3は、図1の搬送アシスト装置をベッド側面側に配置した状態を示す図であり、同図(A)は、ベッドの上方向から見た図であり、同図(B)はベッドの前後方向から見た図であり、同図(C)はベッドの側面方向から見た図である。
図4は、図1の搬送アシスト装置の駆動輪及び従動輪の昇降を示す図であり、同図(A)は、ベッド搬送前の状態を示す図であり、同図(B)は、ベッド搬送中の状態を示す図である。
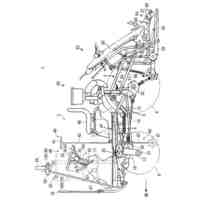
図5は、図1の搬送アシスト装置によりベッドを搬送している状態を示す図である。
図6は、図1の搬送アシスト装置の直進補助輪の動き示す図であり、同図(A)及び(B)はベッドを直進方向に移動させている時の図であり、同図(C)は、ベッドを非直進方向に移動させている時の図である。
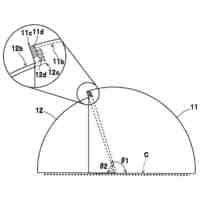
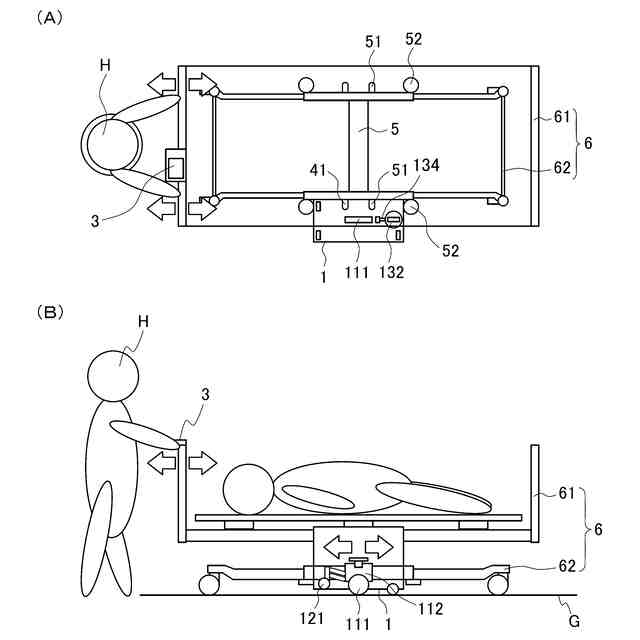
図7は、本発明の搬送アシスト装置によるベッドの搬送時を説明する図であり、同図(A)は、ベッドの上方向から見た図であり、同図(B)はベッドの側面方向から見た図である。
図8は、操作パネルの画面の一例を示す図である。
図9は、操作パネルの画面の他の例を示す図である。
図10は、操作パネルのさらに他の例を示す図である。
図11は、操作パネルのさらに他の例を示す図である。
図12は、搬送者及び手元のフレーム(操作ハンドル)を上方向から見た図である。
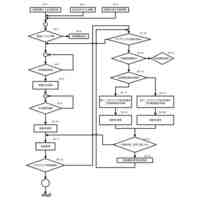
図13は、電動アシスト、及び電動走行の制御ロジックを示すフロー図である。
図14は、赤外線センサ(近傍センサ)によって搬送者の操作ハンドルの把持を検知する例を示す図である。
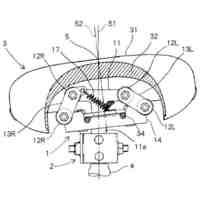
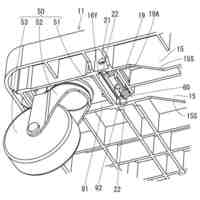
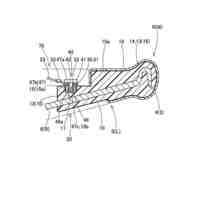
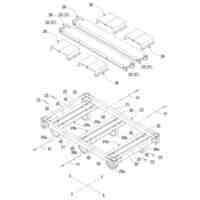
図15は、昇降部の一例を示す図である。
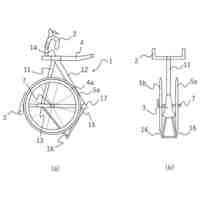
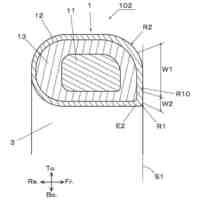
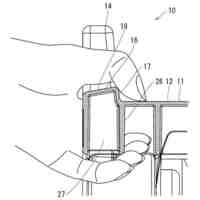
図16は、本装置の凹状部とベッドの治具側係合部(ピン)の側面図である。
図17は、操作パネルとグリップの他の一例を示す図である。
【発明を実施するための形態】
【0009】
本発明の搬送アシスト装置において、前記装置側係合部は、前記装置本体部の進行方向に対する側面側に配置され、さらに、制御部を含み、前記制御部は、前記駆動部及び前記昇降部を制御し、前記駆動部は、さらに、駆動モータを含み、前記駆動モータに前記駆動輪が連結され、前記駆動輪は、前記装置本体部の進行方向の前後に移動可能な推進力が発生可能なように前記装置本体部に配置され、前記従動部の前記従動輪は、水平方向に回動可能な状態で前記装置本体部に配置され、前記制御部により、前記昇降部による前記駆動輪及び前記従動輪の昇降が制御される、という態様であってもよい。
【0010】
本発明の搬送アシスト装置において、前記昇降部は、連結部材及び昇降装置を含み、
前記連結部材の一端は前記駆動輪と連結し、前記連結部材の他端は前記従動輪と連結し前記連結部材の前記一端及び前記他端の間の一部が、前記駆動輪及び前記従動輪が上下方向に昇降可能なように回動可能な状態で軸支され、
前記昇降装置は、前記駆動輪及び前記従動輪の少なくとも一方を昇降可能である、という態様であってもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
リーフ株式会社
搬送アシスト装置
11日前
個人
自転車の傘
8か月前
個人
重量物移動台車
5か月前
個人
サドル揺動装置
10か月前
個人
二輪バイク補助輪
10か月前
個人
自転車用荷台
1か月前
個人
自転車
11か月前
井関農機株式会社
作業機
8か月前
個人
車両用横転防止装置
6か月前
井関農機株式会社
作業機
6か月前
三甲株式会社
保護具
6か月前
個人
クリアレインシェード
5か月前
井関農機株式会社
作業車両
11か月前
日本精機株式会社
表示装置
7か月前
井関農機株式会社
作業車両
3か月前
個人
ステアリングの操向部材
1か月前
株式会社ホシプラ
台車
5か月前
株式会社クラベ
面状ユニット
4か月前
株式会社北誠商事
被覆構造体
7か月前
個人
スライドレインプルーフ
4か月前
個人
自転車の駐輪装置
11か月前
三甲株式会社
台車
22日前
三甲株式会社
台車
8か月前
帝人株式会社
車両構造体
3か月前
祖峰企画株式会社
平台車
2か月前
三甲株式会社
台車
6か月前
三甲株式会社
台車
22日前
井関農機株式会社
作業車両
8か月前
豊田合成株式会社
ハンドル
11か月前
豊田合成株式会社
ハンドル
8か月前
井関農機株式会社
走行車両
6か月前
個人
足踏みペダル式自転車
3か月前
豊田合成株式会社
ハンドル
4か月前
ヤマハ発動機株式会社
車両
6か月前
アルインコ株式会社
運搬台車
3か月前
株式会社オカムラ
カート装置
4か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ