TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024112043
公報種別
公開特許公報(A)
公開日
2024-08-20
出願番号
2023016862
出願日
2023-02-07
発明の名称
車両の運転支援方法及び運転支援装置
出願人
トヨタ自動車株式会社
,
株式会社デンソー
代理人
弁理士法人高田・高橋国際特許事務所
主分類
B62D
6/00 20060101AFI20240813BHJP(鉄道以外の路面車両)
要約
【課題】逸脱防止制御を行う機能と、リスク回避制御を行う機能とを備える車両において、逸脱防止制御の終了間際からリスク回避制御の開始直後までの車両の一連の挙動が車両のドライバに違和感を与えるのを抑える。
【解決手段】車両の運転を支援する方法は、前記車両の走行車線から前記車両が逸脱するのを防止するための操舵制御を含む逸脱防止制御を実行するステップと、前記逸脱防止制御の実行中、前記車両の前方のリスク要因を回避するための操舵制御を含むリスク回避制御の作動条件が満たされた場合、前記逸脱防止制御の終了タイミングから前記リスク回避制御を開始するステップと、を含む。前記リスク回避制御の作動条件は、前記車両から前記リスク要因までの縦方向距離が基準距離以下であることを含む。前記方法は、更に、前記逸脱防止制御の実行中、前記基準距離を拡大するステップを含む。
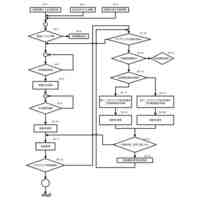
【選択図】図10
特許請求の範囲
【請求項1】
車両の運転を支援する方法であって、
前記車両の走行車線から前記車両が逸脱するのを防止するための操舵制御を含む逸脱防止制御を実行するステップと、
前記逸脱防止制御の実行中、前記車両の前方のリスク要因を回避するための操舵制御を含むリスク回避制御の作動条件が満たされた場合、前記逸脱防止制御の終了タイミングから前記リスク回避制御を開始するステップと、
を含み、
前記リスク回避制御の作動条件は、前記車両から前記リスク要因までの縦方向距離が基準距離以下であることを含み、
前記逸脱防止制御の実行中、前記基準距離を拡大するステップを更に含む
ことを特徴とする車両の運転支援方法。
続きを表示(約 900 文字)
【請求項2】
請求項1に記載の方法であって、
前記逸脱防止制御に含まれる前記操舵制御は、前記車両の基準点を通って前記走行車線に沿って設定される基準線と前記車両の前後軸が平行になるように前記車両を操舵する第1操舵制御と、前記第1操舵制御に続いて行われ、前記走行車線における前記車両の横位置が前記走行車線の中央に向かうように前記車両を操舵する第2操舵制御と、を含み、
前記逸脱防止制御の終了タイミングが、前記第1操舵制御の終了タイミングを含む
ことを特徴とする車両の運転支援方法。
【請求項3】
請求項1又は2に記載の方法であって、
前記逸脱防止制御に含まれる前記操舵制御は、前記車両の基準点を通って前記走行車線に沿って設定される基準線と前記車両の前後軸が平行になるように前記車両を操舵する第1操舵制御と、前記第1操舵制御に続いて行われ、前記走行車線における前記車両の横位置が前記走行車線の中心に向かうように前記車両を操舵する第2操舵制御と、を含み、
前記基準距離の拡大が、前記第1操舵制御の実行中に行われる
ことを特徴とする車両の運転支援方法。
【請求項4】
車両の運転を支援する装置であって、
各種処理を実行するように構成されたプロセッサを備え、
前記プロセッサは、
前記車両の走行車線から前記車両が逸脱するのを防止するための操舵制御を含む逸脱防止制御を実行する処理と、
前記逸脱防止制御の実行中、前記車両の前方のリスク要因を回避するための操舵制御を含むリスク回避制御の作動条件が満たされた場合、前記逸脱防止制御の終了タイミングから前記リスク回避制御を開始する処理と、
を行うように構成され、
前記リスク回避制御の作動条件は、前記車両から前記リスク要因までの縦方向距離が基準距離以下であることを含み、
前記プロセッサは、更に、
前記逸脱防止制御の実行中、前記基準距離を拡大する処理を行う
ように構成されたことを特徴とする車両の運転支援装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両の運転を支援する方法及び装置に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
特開2011-73530号公報は、車両の運転を支援する方法を開示する。この従来の方法では、車両が道路から逸脱するのを防止する逸脱防止制御が行われる。この逸脱防止制御では、道路上に設定された仮想レーンからの逸脱量に基づいて、車両を仮想レーンに戻すための目標ヨーモーメントが計算される。目標ヨーモーメントは、ブレーキ制御装置と、ステアリング制御装置に配分される。ブレーキ制御装置は、配分後の目標ヨーモーメントに応じたヨーモーメントを発生させるようにブレーキを制御する。一方、ステアリング制御装置は、配分後の目標ヨーモーメントをアシスト操舵トルクに変換し、このアシスト操舵トルクに基づいてトルクを発生させるようにステアリングを制御する。
【先行技術文献】
【特許文献】
【0003】
特開2011-73530号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
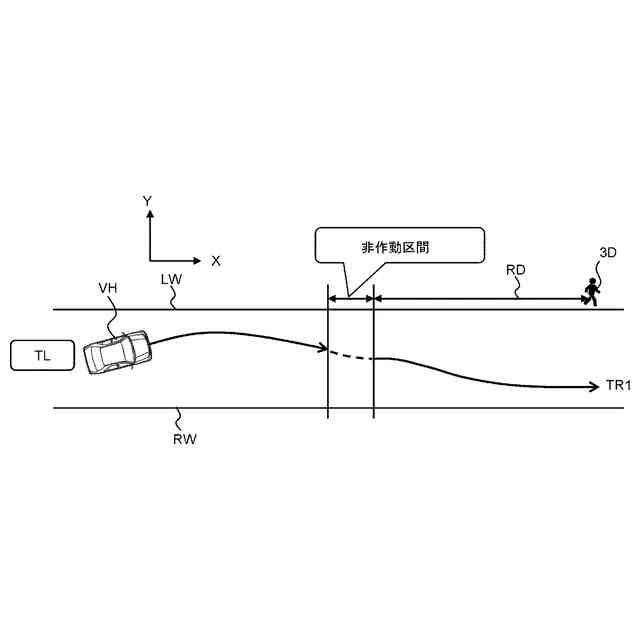
車両の運転を支援する方法には、車両が障害物と衝突しそうな状況において実行される制御が含まれる。本願では、このような運転支援制御よりも一段階手前の状況、即ち、車両が障害物と衝突する可能性が高くない状況で実行される運転支援制御を考える。この運転支援制御は、車両の前方の歩行者等をリスク要因と見做し、このリスク要因を回避するために行われる。このような運転支援制御を、本願ではリスク回避制御と称す。
【0005】
逸脱防止制御を行う機能と、リスク回避制御を行う機能とを備える車両の場合、これらの運転支援制御の作動条件が満たされるか否かが独立して判断される。ここで問題となるのは、これらの運転支援制御の作動条件が同時期に満たされた場合である。但し、この問題は、早期に開始された一方の運転支援制御が終わり次第、他方の運転支援制御を開始することで解決することが期待される。
【0006】
逸脱防止制御の作動条件とリスク回避制御の作動条件とが時間を隔てて満たされた場合、上記の問題は発生しないとも考えられる。しかしながら、逸脱防止制御の終了後、リスク回避制御が開始されるまでの時間が数秒程度の場合、逸脱防止制御の終了間際からリスク回避制御の開始直後までの車両の一連の挙動がぎこちなく、一体感に欠けるものとなる。そうすると、一連の挙動が車両のドライバに不信感を与える可能性が高い。
【0007】
本開示の1つの目的は、逸脱防止制御を行う機能と、リスク回避制御を行う機能とを備える車両において、逸脱防止制御の終了間際からリスク回避制御の開始直後までの車両の一連の挙動が車両のドライバに違和感を与えるのを抑える技術を提供することにある。
【課題を解決するための手段】
【0008】
本開示の第1の観点は、車両の運転を支援する方法であり、次の特徴を有する。
前記車両の走行車線から前記車両が逸脱するのを防止するための操舵制御を含む逸脱防止制御を実行するステップと、前記逸脱防止制御の実行中、前記車両の前方のリスク要因を回避するための操舵制御を含むリスク回避制御の作動条件が満たされた場合、前記逸脱防止制御の終了タイミングから前記リスク回避制御を開始するステップと、を含む。
前記リスク回避制御の作動条件は、前記車両から前記リスク要因までの縦方向距離が基準距離以下であることを含む。
前記方法は、更に、前記逸脱防止制御の実行中、前記基準距離を拡大するステップを含む。
【0009】
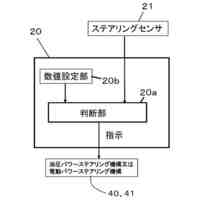
本開示の第2の観点は、車両の運転を支援する装置であり、次の特徴を有する。
前記装置は、各種処理を実行するように構成されたプロセッサを備える。前記プロセッサは、前記車両の走行車線から前記車両が逸脱するのを防止するための操舵制御を含む逸脱防止制御を実行する処理と、前記逸脱防止制御の実行中、前記車両の前方のリスク要因を回避するための操舵制御を含むリスク回避制御の作動条件が満たされた場合、前記逸脱防止制御の終了タイミングから前記リスク回避制御を開始する処理と、を行うように構成されている。
前記リスク回避制御の作動条件は、前記車両から前記リスク要因までの縦方向距離が基準距離以下であることを含む。
前記プロセッサは、更に、前記逸脱防止制御の実行中、前記基準距離を拡大する処理を行うように構成されている。
【発明の効果】
【0010】
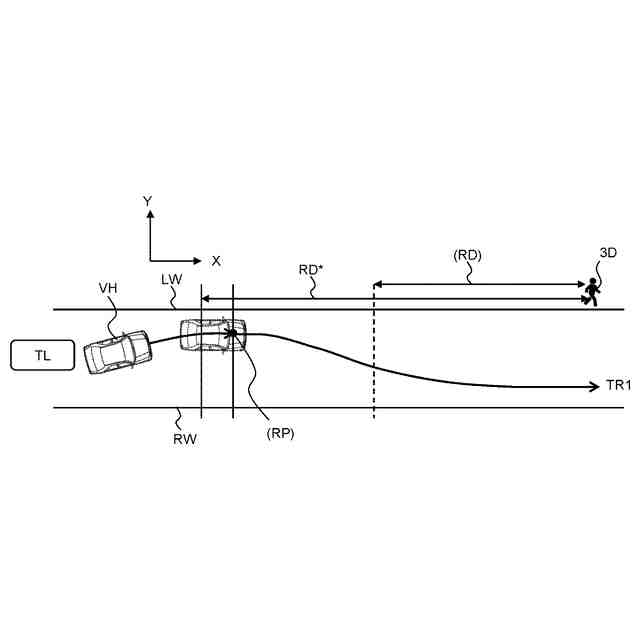
本開示の観点によれば、逸脱防止制御の実行中、リスク回避制御の作動条件に含まれる基準距離が拡大される。リスク回避制御の作動条件は、車両からリスク要因までの縦方向距離が基準距離以下であることを含む。そのため、基準距離が拡大されれば、リスク回避制御の作動条件が満たされ易くなる。そうすると、この拡大がなければ逸脱防止制御の終了後、リスク回避制御が開始されるまでに待ち時間が発生するような状況において、逸脱防止制御の終了タイミングからリスク回避制御を開始することが可能となる。故に、逸脱防止制御の終了間際からリスク回避制御の開始直後までの車両の一連の挙動が車両のドライバに違和感を与えるのを抑えることが可能となる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
自転車の傘
7か月前
個人
サドル揺動装置
9か月前
個人
重量物移動台車
4か月前
個人
二輪バイク補助輪
10か月前
個人
自動二輪車
11か月前
個人
カウル取り付け器具
12か月前
井関農機株式会社
作業機
6か月前
個人
自転車用荷台
1か月前
個人
車両用横転防止装置
6か月前
個人
自転車
11か月前
井関農機株式会社
作業機
8か月前
三甲株式会社
保護具
6か月前
日本精機株式会社
表示装置
7か月前
井関農機株式会社
作業車両
11か月前
個人
クリアレインシェード
5か月前
井関農機株式会社
作業車両
3か月前
株式会社クラベ
面状ユニット
3か月前
個人
スライドレインプルーフ
3か月前
個人
電動カート
12か月前
株式会社北誠商事
被覆構造体
7か月前
個人
自転車の駐輪装置
11か月前
個人
ステアリングの操向部材
1か月前
株式会社ホシプラ
台車
5か月前
三甲株式会社
台車
7か月前
帝人株式会社
車両構造体
3か月前
三甲株式会社
台車
18日前
三甲株式会社
台車
6か月前
祖峰企画株式会社
平台車
2か月前
三甲株式会社
台車
18日前
豊田合成株式会社
ハンドル
11か月前
井関農機株式会社
走行車両
6か月前
豊田合成株式会社
ハンドル
11か月前
井関農機株式会社
作業車両
8か月前
豊田合成株式会社
ハンドル
8か月前
ヤマハ発動機株式会社
車両
6か月前
個人
足踏みペダル式自転車
3か月前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ