TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024111887
公報種別
公開特許公報(A)
公開日
2024-08-20
出願番号
2023016577
出願日
2023-02-07
発明の名称
車両制御装置、車両制御方法及びプログラム
出願人
トヨタ自動車株式会社
,
株式会社デンソー
代理人
弁理士法人プロスペック特許事務所
主分類
B62D
6/00 20060101AFI20240813BHJP(鉄道以外の路面車両)
要約
【課題】車両が自動車専用道路以外の一般道を走行している場合にも横位置制御を実行し、且つ、横位置制御が運転者に違和感を与える可能性を低減する車両制御装置を提供する。
【解決手段】車両制御装置は、車両が走行している走行領域における車両の横位置が所定の目標横位置を維持して車両が走行するように横位置を制御する横位置制御を実行する。車両制御装置は、横位置制御においては、車両の横位置を制御可能な制御量を、横位置が目標横位置を維持するために取得された目標制御量と一致するように制御し、車両が自動車専用道路以外の一般道を走行している場合、車両が自動車専用道路を走行している場合よりも、目標制御量を小さくし、車両が一般道を走行している場合であっても横位置制御を実行する。
【選択図】 図4
特許請求の範囲
【請求項1】
車両が走行している走行領域における前記車両の横位置が所定の目標横位置を維持して前記車両が走行するように前記横位置を制御する横位置制御を実行する車両制御装置において、
前記車両制御装置は、
前記横位置制御においては、前記車両の前記横位置を制御可能な制御量を、前記横位置が前記目標横位置を維持するために取得された目標制御量と一致するように制御し、
前記車両が自動車専用道路以外の一般道を走行している場合、前記車両が前記自動車専用道路を走行している場合よりも、前記目標制御量を小さくし、
前記車両が前記一般道を走行している場合であっても前記横位置制御を実行する、
ように構成された、車両制御装置。
続きを表示(約 1,500 文字)
【請求項2】
請求項1に記載の車両制御装置において、
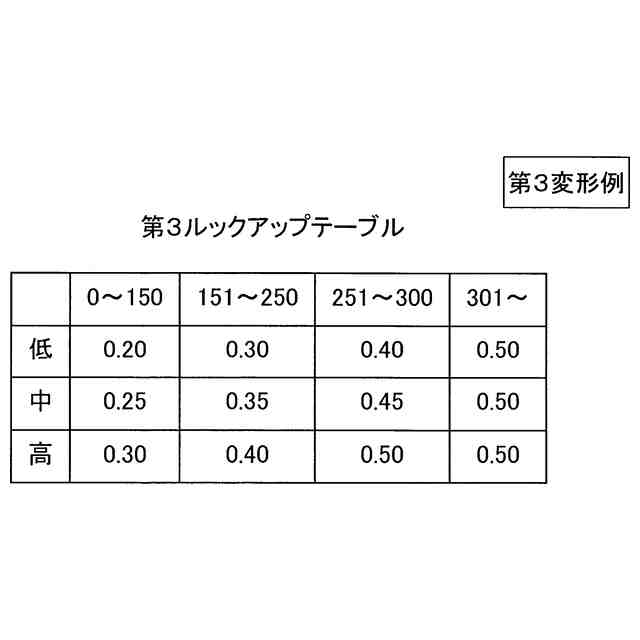
前記車両制御装置は、前記車両が前記一般道を走行している場合には、前記一般道のカーブ路の曲がり具合が急であるほど、前記目標制御量を小さくするように構成された、
車両制御装置。
【請求項3】
請求項1に記載の車両制御装置であって、
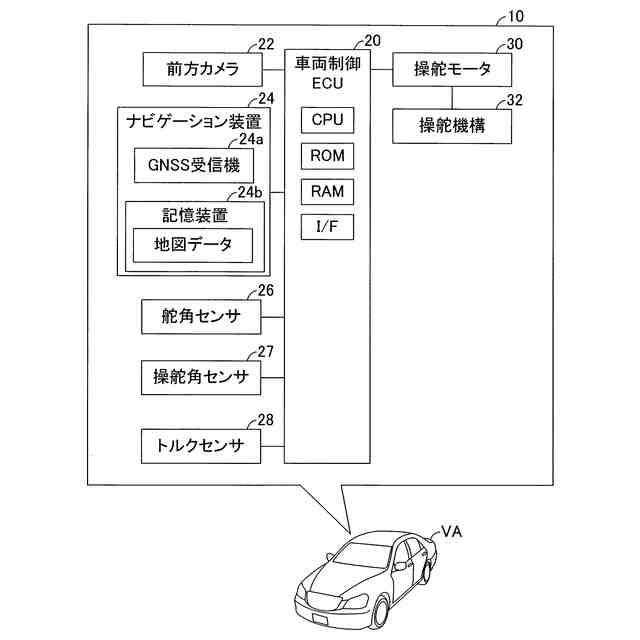
前記車両の前方の領域を撮影することにより前方画像を取得するカメラを備え、
前記車両制御装置は、
前記前方画像に基いて前記走行領域を区画する境界としての白線を認識し、
前記白線に基いて前記目標横位置を取得し、
前記車両が前記一般道を走行している場合には、前記白線の認識の確からしさを表す白線信頼度が低いほど、前記目標制御量を小さくするように構成された、
車両制御装置。
【請求項4】
請求項1に記載の車両制御装置であって、
前記車両の前方の領域を撮影することにより前方画像を取得するカメラを備え、
前記車両制御装置は、
前記前方画像に基いて前記走行領域を区画する境界としての白線を認識し、
前記白線に基いて前記目標横位置を取得し、
前記車両が前記一般道を走行している場合には、前記一般道のカーブ路の曲がり具合が急であるほど前記目標制御量を小さくし、前記白線の認識の確からしさを表す白線信頼度が低いほど前記目標制御量を小さくするように構成された、
車両制御装置。
【請求項5】
請求項1に記載の車両制御装置において、
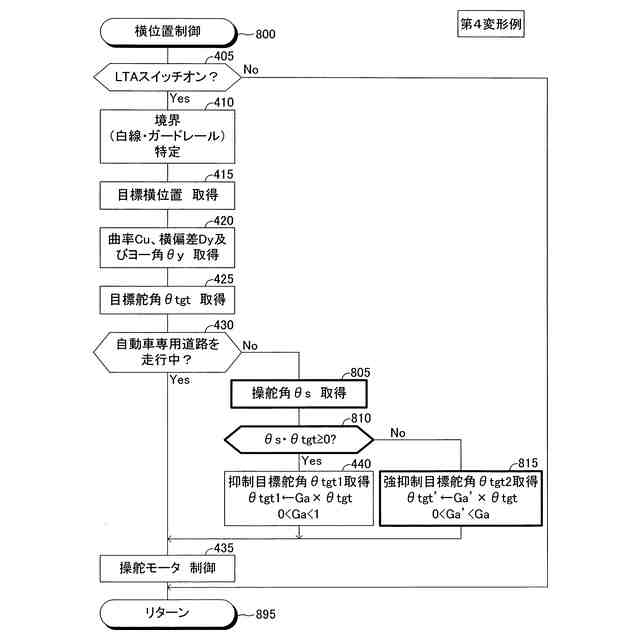
前記車両制御装置は、前記車両が前記一般道を走行している場合において、前記横位置制御により前記車両が移動する制御方向と運転者が前記車両を移動させようとする意図方向とが一致しないとき、前記制御方向と前記意図方向とが一致するときよりも、前記目標制御量を小さくするように構成された、車両制御装置。
【請求項6】
車両が走行している走行領域における前記車両の横位置が所定の目標横位置を維持して前記車両が走行するように前記横位置を制御する横位置制御を前記車両に搭載されたコンピュータが実行する車両制御方法において、
前記車両制御方法は、
前記横位置制御においては、前記車両の前記横位置を制御可能な制御量を、前記横位置が前記目標横位置を維持するために取得された目標制御量と一致するように制御するステップと、
前記車両が自動車専用道路以外の一般道を走行している場合、前記車両が前記自動車専用道路を走行している場合よりも、前記目標制御量を小さくするステップと、
前記車両が前記一般道を走行している場合であっても前記横位置制御を実行するステップと、
を含む、車両制御方法。
【請求項7】
車両が走行している走行領域における前記車両の横位置が所定の目標横位置を維持して前記車両が走行するように前記横位置を制御する横位置制御を前記車両に搭載されたコンピュータに実行させるプログラムにおいて、
前記プログラムは、前記コンピュータに
前記横位置制御においては、前記車両の前記横位置を制御可能な制御量を、前記横位置が前記目標横位置を維持するために取得された目標制御量と一致するように制御させるステップと、
前記車両が自動車専用道路以外の一般道を走行している場合、前記車両が前記自動車専用道路を走行している場合よりも、前記目標制御量を小さくさせるステップと、
前記車両が前記一般道を走行している場合であっても前記横位置制御を実行させるステップと、
を含む、プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両が走行領域における所定の目標横位置を走行するように車両の走行領域における横位置を制御する横位置制御を実行する車両制御装置、車両に搭載されたコンピュータが上記横位置制御を実行する車両制御方法、及び、上記コンピュータに上記横位置制御を実行させるプログラムに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
従来から、上記横位置制御として車線維持制御(LTA)等を実行する車両制御装置が知られている。なお、LTAは、Lane Tracing Assistの略である。このような車両制御装置は、横位置制御を実行している場合には、車両の走行領域における横位置を制御するための制御量を、「走行領域における目標横位置を走行するために取得された目標制御量」と一致するように制御する。
【0003】
例えば、特許文献1に記載の車両制御装置(以下、「従来装置」と称呼する。)は、車両が自動車専用道路を走行している場合には上記横位置制御を実行し、車両が自動車専用道路以外の道路である一般道を走行している場合には上記横位置制御を実行せずに車線逸脱警報制御を実行する。
【0004】
車両が一般道を走行している場合に従来装置が上記横位置制御を実行しない理由は以下の通りである。
(1)一般道には、路上駐車している車両及び歩行者等が存在するため、上記横位置制御による車両の横位置の制御が適切でない可能性がある。
(2)一般道では、白線を認識しにくい可能性があるため、目標横位置を適切に設定できない可能性がある。
【先行技術文献】
【特許文献】
【0005】
特開2003-141694号公報
【発明の概要】
【0006】
車両が一般道を走行している場合にも上記横位置制御が実行されることが望ましい。しかし、車両が一般道を走行している場合に上記横位置制御が実行されると、運転者が意図している車両の横位置が上記横位置制御の目標横位置と一致しない可能性がある。このような不一致が生じている場合には、上記横位置制御により車両が向かう方向と運転者の操舵操作の方向とが一致しなくなり(逆になり)、上記横位置制御が運転者の操舵操作に干渉してしまう可能性が高い。このような干渉が生じた場合には、上記横位置制御は、運転者に違和感を与える可能性が高い。
【0007】
本発明は前述した課題に対処するためになされたものである。即ち、車両が一般道を走行している場合にも横位置制御を実行し、且つ、横位置制御が運転者に違和感を与える可能性を低減する車両制御装置を提供することにある。
【0008】
本発明の車両制御装置(以下、「本発明装置」と称呼する。)は、車両が走行している走行領域(TA)における前記車両の横位置が所定の目標横位置(Ltgt)を維持して前記車両が走行するように前記走行領域における前記車両の横位置を制御する横位置制御を実行する。
前記車両制御装置は、
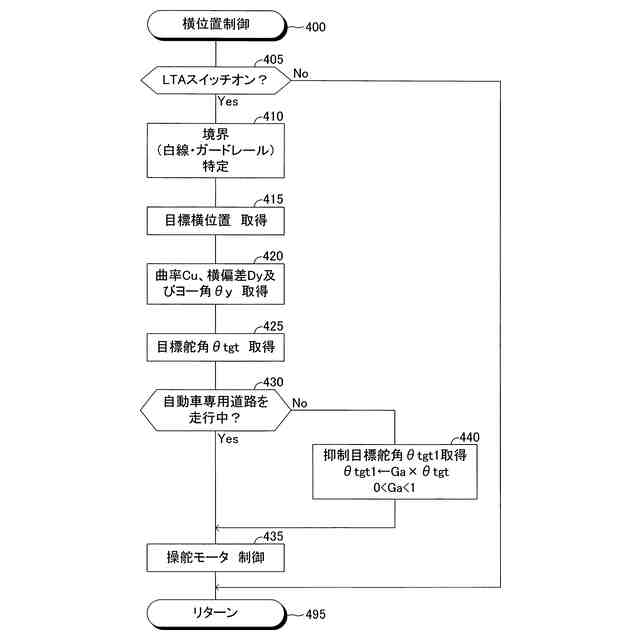
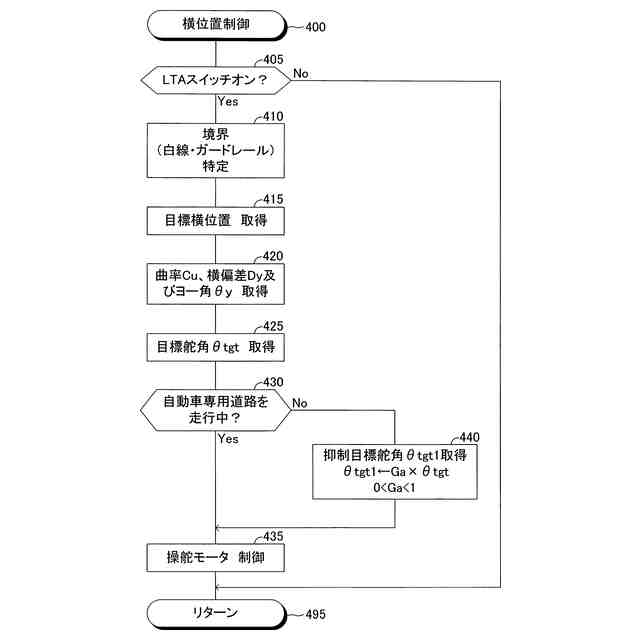
前記横位置制御においては、前記車両の前記横位置を制御可能な制御量(θ)を、前記横位置が前記目標横位置を維持するために取得された目標制御量(θtgt)と一致するように制御し(ステップ435)、
前記車両が自動車専用道路以外の一般道を走行している場合(ステップ430「No」)、前記車両が前記自動車専用道路を走行している場合よりも(ステップ430「Yes」)、前記目標制御量を小さくし(ステップ440)、
前記車両が前記一般道を走行している場合であっても前記横位置制御を実行する(ステップ430「No」、ステップ440、ステップ435)、
ように構成されている。
【0009】
上記したように、車両が一般道を走行している場合には、運転者が意図する横位置(意図横位置)と目標横位置との不一致が生じやすい。このような不一致が生じている場合には、運転者の操舵操作による車両の移動方向と横位置制御による車両の移動方向とが逆になる可能性がある(換言すると、横位置制御が運転者の操舵操作に干渉する可能性がある)。このような干渉が生じると、横位置制御は、運転者に違和感を与える可能性が高い。そこで、本発明装置は、車両が一般道を走行している場合には、車両が自動車専用道路を走行している場合よりも目標制御量を小さくして、横位置制御を実行する。これにより、車両が一般道を走行している場合にも横位置制御を実行し、且つ、車両が一般道を走行している場合に実行される横位置制御が運転者に違和感を与える可能性を低減できる。
【0010】
本発明装置の一態様において、
請求項1に記載の車両制御装置において、
前記車両制御装置は、前記車両が前記一般道を走行している場合には(ステップ430「No」)、前記一般道のカーブ路の曲がり具合が急であるほど、前記目標制御量を小さくするように構成されている(ステップ440、図5)。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
自転車の傘
7か月前
個人
重量物移動台車
4か月前
個人
サドル揺動装置
9か月前
個人
自動二輪車
11か月前
個人
二輪バイク補助輪
10か月前
井関農機株式会社
作業機
8か月前
井関農機株式会社
作業機
6か月前
個人
車両用横転防止装置
6か月前
個人
自転車
11か月前
個人
自転車用荷台
1か月前
三甲株式会社
保護具
6か月前
個人
クリアレインシェード
5か月前
井関農機株式会社
作業車両
11か月前
井関農機株式会社
作業車両
3か月前
日本精機株式会社
表示装置
7か月前
株式会社北誠商事
被覆構造体
7か月前
個人
ステアリングの操向部材
1か月前
株式会社ホシプラ
台車
5か月前
個人
スライドレインプルーフ
3か月前
個人
自転車の駐輪装置
11か月前
株式会社クラベ
面状ユニット
3か月前
三甲株式会社
台車
7か月前
三甲株式会社
台車
6か月前
三甲株式会社
台車
18日前
祖峰企画株式会社
平台車
2か月前
帝人株式会社
車両構造体
3か月前
三甲株式会社
台車
18日前
井関農機株式会社
走行車両
6か月前
井関農機株式会社
作業車両
8か月前
豊田合成株式会社
ハンドル
8か月前
ヤマハ発動機株式会社
車両
6か月前
個人
足踏みペダル式自転車
3か月前
豊田合成株式会社
ハンドル
11か月前
豊田合成株式会社
ハンドル
4か月前
豊田合成株式会社
ハンドル
11か月前
アルインコ株式会社
運搬台車
3か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ