TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024092899
公報種別
公開特許公報(A)
公開日
2024-07-08
出願番号
2023049958
出願日
2023-03-27
発明の名称
ロボットの点検状況可視化システムおよびロボットの点検状況可視化方法
出願人
株式会社デンソーウェーブ
代理人
弁理士法人サトー
主分類
B25J
19/06 20060101AFI20240701BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットの異常を容易に検出することができるロボットの点検状況可視化システムを提供する。
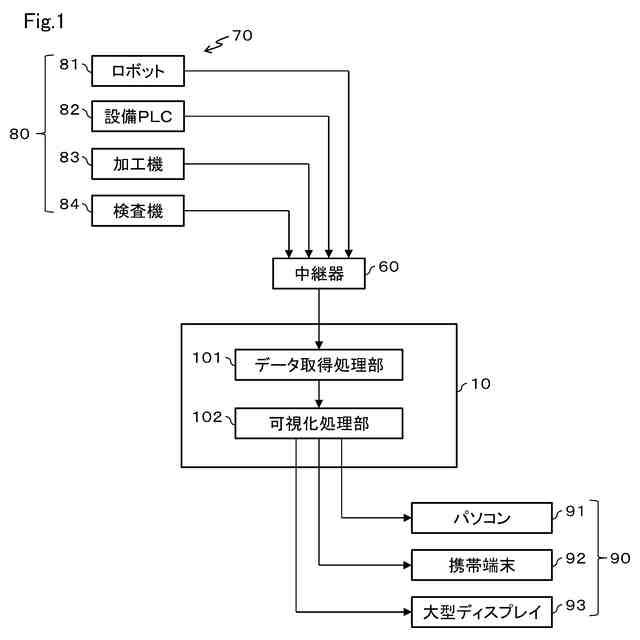
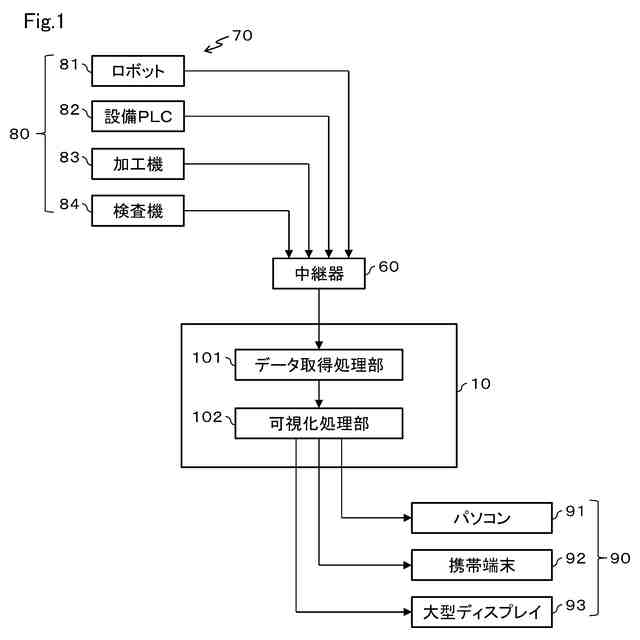
【解決手段】ロボット81の点検状況を可視化する可視化システム10は、データ取得処理部101および可視化処理部102を備える。データ取得処理部101は、ロボット81の点検状況を示す点検状況データを取得するデータ取得処理を実行可能である。可視化処理部102は、点検状況データに基づいて、正常な状態のロボット81にロボット81の点検用の動作として予め準備されたマスタ動作を実行させた際におけるロボット81の軸を駆動するモータに流れる電流の波形であるマスタ波形およびマスタ波形に対して所定の幅を持たせた波形である規格波形のうち少なくとも一方と、ロボット81にマスタ動作を実行させた際における電流の波形である計測波形と、を表示装置90の同一画面に表示させるための可視化処理を実行可能である。
【選択図】図1
特許請求の範囲
【請求項1】
ロボットの点検状況を可視化するシステムであって、
前記ロボットの点検状況を示す点検状況データを取得するデータ取得処理を実行可能なデータ取得処理部と、
前記データ取得処理部により取得された前記点検状況データに基づいて、正常な状態の前記ロボットに前記ロボットの点検用の動作として予め準備されたマスタ動作を実行させた際における前記ロボットの軸を駆動するモータに流れる電流の波形であるマスタ波形および前記マスタ波形に対して所定の幅を持たせた波形である規格波形のうち少なくとも一方と、前記ロボットに前記マスタ動作を実行させた際における前記電流の波形である計測波形と、を表示装置の同一画面に表示させるための可視化処理を実行可能な可視化処理部と、
を備えるロボットの点検状況可視化システム。
続きを表示(約 1,100 文字)
【請求項2】
前記可視化処理部は、
前記可視化処理において、前記計測波形が前記規格波形の範囲に収まっている場合に前記ロボットの点検結果が正常であることを表すとともに前記計測波形が前記規格波形の範囲から外れている場合に前記ロボットの点検結果が異常であることを表す点検結果情報を表示させる、
請求項1に記載のロボットの点検状況可視化システム。
【請求項3】
前記可視化処理部は、
前記計測波形が前記規格波形の範囲から外れた箇所を明示するための表示を行うことにより前記ロボットの点検結果が異常であることを表す前記点検結果情報の表示を行う、
請求項2に記載のロボットの点検状況可視化システム。
【請求項4】
前記可視化処理部は、
前記計測波形が前記規格波形の範囲から外れた場合に、それに関する各種の情報が含まれるログ情報を生成することにより前記ロボットの点検結果が異常であることを表す前記点検結果情報の表示を行う、
請求項2に記載のロボットの点検状況可視化システム。
【請求項5】
前記可視化処理部は、
前記計測波形を得るために前記ロボットに前記マスタ動作を実行させている期間である点検期間に前記点検結果情報を表示させ、
前記点検中に前記ロボットの前記点検結果が異常であることを表す前記点検結果情報を表示させた場合、その表示を少なくとも前記点検期間が終了する時点まで維持する、
請求項1から4のいずれか一項に記載のロボットの点検状況可視化システム。
【請求項6】
前記可視化処理部は、
前記計測波形を得るために前記ロボットに前記マスタ動作を実行させている期間である点検期間が終了した時点以降の任意の時点において前記点検結果情報を表示させる、
請求項1から4のいずれか一項に記載のロボットの点検状況可視化システム。
【請求項7】
ロボットの点検状況を可視化する方法であって、
前記ロボットの点検状況を示す点検状況データを取得するデータ取得処理を実行可能なデータ取得処理手順と、
前記データ取得処理手順により取得された前記点検状況データに基づいて、正常な状態の前記ロボットに予め準備されたマスタ動作を実行させた際における前記ロボットの軸を駆動するモータに流れる電流の波形であるマスタ波形および前記マスタ波形に対して所定の幅を持たせた波形である規格波形のうち少なくとも一方と、前記ロボットに前記マスタ動作を実行させた際における前記電流の波形である計測波形と、を表示装置の同一画面に表示させるための可視化処理を実行可能な可視化処理手順と、
を含むロボットの点検状況可視化方法。
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、ロボットの点検状況可視化システムおよびロボットの点検状況可視化方法に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
一般に、工場内に設置される製品の生産ラインは、加工機、検査機、ロボット、搬送装置および梱包装置などの複数の生産設備から構成される。近年、このような生産設備について、予防保全および故障予知のニーズが高まっている。生産設備のうち特にロボットは、突発的な故障が発生したときには、交換や調整を行う必要があることから復帰までに多大な時間を要するおそれがある。そのため、特にロボットについては、予防保全および故障検知を確実に行うことにより計画的な設備保全を実現して生産に影響を及ぼすことがないようにしなければならない。
【0003】
従来、特許文献1、2および3に開示されるように、ロボットおよび搬送装置などのモータを使用した設備の状態監視としては、次のような手法が広く用いられている。まず、第1の従来手法は、モータの電流値をモニタリングし、そのモニタリングした電流値について傾向監視や閾値判定を行うことにより設備の異常を検出する手法である。また、第2の従来手法は、モータに振動センサなどを取り付け、それにより得られる振動データについてFFT解析を行うことにより設備の異常を検出する手法である。
【先行技術文献】
【特許文献】
【0004】
特開2022-98206号公報
特開2021-87238号公報
特許第6793898号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
第1の従来手法によれば、搬送装置であるコンベアのモータなどの等速動作が多い箇所に適用する場合には異常検出が可能であると考えられる。しかし、第1の従来手法では、使用される環境や動作により電流値が大きく異なる傾向があるロボットに適用する場合、閾値設定や傾向監視が難しくなることから異常を検出することが困難である。第2の従来手法によれば、モータが可動するものではなく固定されているような設備に適用する場合には有効であると考えられるが、モータ自体も移動するロボットに適用する場合、振動データにロボットの動作自体が影響することから、異常を検出することが困難である。
【0006】
本発明は上記事情に鑑みてなされたものであり、その目的は、ロボットの異常を容易に検出することができるロボットの点検状況可視化システムおよびロボットの点検状況可視化方法を提供することにある。
【課題を解決するための手段】
【0007】
実施形態のロボットの点検状況可視化システムは、ロボットの点検状況を可視化するシステムである。ロボットの点検状況可視化システムは、前記ロボットの点検状況を示す点検状況データを取得するデータ取得処理を実行可能なデータ取得処理部と、前記データ取得処理部により取得された前記点検状況データに基づいて、正常な状態の前記ロボットに前記ロボットの点検用の動作として予め準備されたマスタ動作を実行させた際における前記ロボットの軸を駆動するモータに流れる電流の波形であるマスタ波形および前記マスタ波形に対して所定の幅を持たせた波形である規格波形のうち少なくとも一方と、前記ロボットに前記マスタ動作を実行させた際における前記電流の波形である計測波形と、を表示装置の同一画面に表示させるための可視化処理を実行可能な可視化処理部と、を備える。
【図面の簡単な説明】
【0008】
一実施形態に係るロボットの点検状況可視化システムの構成を模式的に示す図
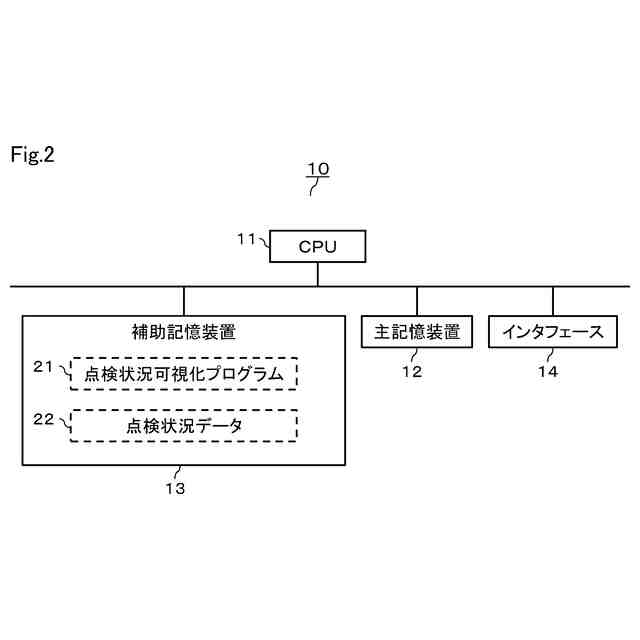
一実施形態に係るロボットの点検状況可視化システムのハードウェア構成の一例を模式的に示す図
一実施形態に係る可視化処理により表示装置の画面に表示される点検中の表示内容の一例を模式的に示す図
一実施形態に係る可視化処理により表示装置の画面に表示される点検終了後の表示内容の一例を模式的に示す図その1
一実施形態に係る可視化処理により表示装置の画面に表示される点検終了後の表示内容の一例を模式的に示す図その2
一実施形態に係る規格波形の生成などに関する処理内容の一例を模式的に示す図
一実施形態に係る各波形などの表示に関する処理内容の一例を模式的に示す図
変形例に係るマスタ波形を表す線および規格波形を表す線を模式的に示す図
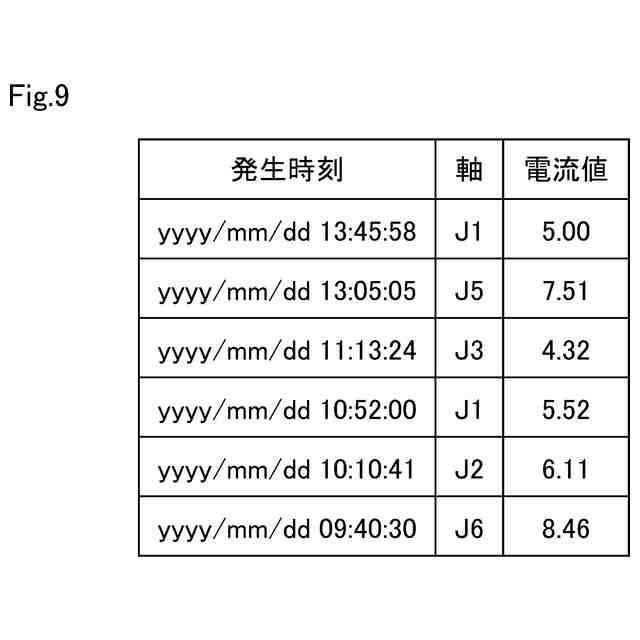
変形例に係るログ情報の具体的な一例を示す図
【発明を実施するための形態】
【0009】
以下、一実施形態によるロボットの点検状況可視化システムについて、図面を参照しながら説明する。なお、本明細書では、ロボットの点検状況可視化システムを可視化システムと省略することがある。図1に示す可視化システム10は、生産ライン70において用いられる生産設備80のうちの1つであるロボット81の点検状況を可視化する、より具体的にはロボット81の点検状況を可視化して表示装置90に表示するシステムである。可視化システム10の対象となる生産ライン70は、産業用ロボットであるロボット81以外にも、例えば設備PLC82、加工機83および検査機84などの複数の生産設備80を備えている。なお、PLCは、Programmable Logic Controllerの略称である。
【0010】
設備PLC82は、任意のプログラミングが可能な汎用的な制御装置であって、搬送装置や組付け装置などの生産設備に組み込まれたものである。また、ロボット81、加工機83および検査機84は、それぞれ例えば設備PLC82とは別の専用の制御装置を有している。設備PLC82や、ロボット81、加工機83および検査機84の制御装置は、例えばネットワークHUBなどの中継器60を介して可視化システム10に接続されている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
木製ハンマー
4日前
個人
ねじ締め装置
8か月前
個人
スロットルトリガー
1日前
日東精工株式会社
搬送装置
4か月前
中国電力株式会社
腰袋
3か月前
株式会社ツノダ
挟持工具
5か月前
株式会社ツノダ
挟持工具
6か月前
日東工器株式会社
動力工具
8日前
日東工器株式会社
動力工具
8日前
株式会社右川ゴム製造所
把持装置
4か月前
日東工器株式会社
動力工具
8日前
日東工器株式会社
衝撃工具
1か月前
川崎重工業株式会社
ハンド
6か月前
日東工器株式会社
動力工具
8日前
個人
ロボットシステム
8か月前
個人
メンテナンス用スタンド
1か月前
CKD株式会社
把持装置
1日前
学校法人立命館
ロボットハンド
5か月前
トヨタ自動車株式会社
関節機構
8か月前
川崎重工業株式会社
罫書用治具
2か月前
学校法人立命館
グリッパ
5か月前
株式会社マキタ
動力工具
2か月前
株式会社不二越
ロボット
8か月前
東京計器株式会社
接触検知装置
19日前
トヨタ自動車株式会社
ロボット
19日前
株式会社ダイヘン
搬送装置
3か月前
個人
回転工具およびバリ取り部品
18日前
個人
容器引っ掛け棒およびその使用方法
1か月前
トヨタ自動車株式会社
ハンド構造
2か月前
株式会社ダイヘン
搬送装置
3か月前
株式会社ハーモ
開閉チャック装置
1か月前
個人
プーリーキー抜き治具
5か月前
東京都公立大学法人
ロボットハンド
3か月前
株式会社日本キャリア工業
ロボットハンド
1か月前
宮川工機株式会社
板状部品移動装置
3か月前
株式会社大林組
ロッカー装置
19日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ