TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024085768
公報種別
公開特許公報(A)
公開日
2024-06-27
出願番号
2022200484
出願日
2022-12-15
発明の名称
車両制御装置、車両制御方法及びプログラム
出願人
トヨタ自動車株式会社
代理人
弁理士法人プロスペック特許事務所
主分類
B62D
6/00 20060101AFI20240620BHJP(鉄道以外の路面車両)
要約
【課題】制御量が目標制御量と一致するまでにかかる時間が長くなることに起因して運転者に違和感を抱かせる可能性を低減でき、且つ、操舵制御が停止した場合に車両が他の物体と衝突する可能性を低減できる車両制御装置を提供する。
【解決手段】車両制御装置は、車両の横方向の制御量を前記車両の周辺環境に基いて取得された目標制御量と一致させる操舵制御を実行する。車両制御装置は、前記操舵制御を実行している場合、前記目標制御量の上限値を、前記操舵制御が停止したと仮定した場合に前記車両が物体と衝突する停止時衝突リスクが低いほど大きな値に設定し、前記制御量が前記上限値よりも大きくならないように前記操舵制御を実行する。
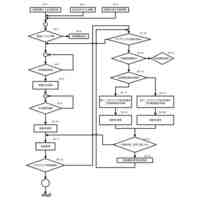
【選択図】 図2
特許請求の範囲
【請求項1】
車両の横方向の制御量を前記車両の周辺環境に基いて取得された目標制御量と一致させる操舵制御を実行する車両制御装置において、
前記車両制御装置は、
前記操舵制御を実行している場合、前記目標制御量の上限値を、前記操舵制御が停止したと仮定した場合に前記車両が物体と衝突する停止時衝突リスクが低いほど大きな値に設定し、
前記制御量が前記上限値よりも大きくならないように前記操舵制御を実行する、
ように構成された、車両制御装置。
続きを表示(約 830 文字)
【請求項2】
請求項1に記載の車両制御装置において、
前記車両制御装置は、前記操舵制御が停止した場合の前記車両の予測進路を走行した車両が前記物体と最接近したときの距離に基いて前記停止時衝突リスクを取得するように構成された、
車両制御装置。
【請求項3】
請求項1に記載の車両制御装置において、
前記車両制御装置は、運転者の前記車両のステアリングホイールの把持状態に基いて前記停止時衝突リスクを取得するように構成された、
車両制御装置。
【請求項4】
車両に搭載されたコンピュータが、前記車両の横方向の制御量を前記車両の周辺環境に基いて取得された目標制御量と一致させる操舵制御を実行する車両制御方法において、
前記車両制御方法は、
前記コンピュータが、前記操舵制御を実行している場合、前記目標制御量の上限値を、前記操舵制御が停止したと仮定した場合に前記車両が物体と衝突する停止時衝突リスクが低いほど大きな値に設定する第1ステップと、
前記コンピュータが、前記制御量が前記上限値よりも大きくならないように前記操舵制御を実行する第2ステップと、を含む、
車両制御方法。
【請求項5】
車両に搭載されたコンピュータに、前記車両の横方向の制御量を前記車両の周辺環境に基いて取得された目標制御量と一致させる操舵制御を実行させるプログラムにおいて、
前記プログラムは、
前記コンピュータに前記操舵制御を実行させている場合、前記コンピュータに、前記目標制御量の上限値を、前記操舵制御が停止したと仮定した場合に前記車両が物体と衝突する停止時衝突リスクが低いほど大きな値に設定させる第1ステップと、
前記コンピュータに、前記制御量が前記上限値よりも大きくならないように前記操舵制御を実行させる第2ステップと、を含む、
プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両の横方向の制御量を車両の周辺環境に基いて取得された目標制御量と一致させる操舵制御を実行する車両制御装置、車両に搭載されたコンピュータが操舵制御を実行する車両制御方法、及び、車両に搭載されたコンピュータに操舵制御を実行させるプログラムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
従来から、LTA(Lane Tracing Assist)、ADTJA(Advanced Drive Traffic Jam Assist)及びLCA(Lane Change Assist)等の操舵制御を実行する車両制御装置が知られている。
【0003】
例えば、特許文献1に記載の車両制御装置(以下、「従来装置」と称呼する。)は、LTAの実行中に特定認識状況が生じていない場合、操舵角の大きさが第1操舵角ガード値を超えないように且つ操舵角速度の大きさが第1操舵角速度ガード値を超えないように操舵角を制御する。特定認識状況とは、走行レーンの左区画線及び右区画線の何れか一方のみを認識し、且つ、認識している一方の区画線が左区画線と右区画線との間で変化するとの状況である。特定認識状況が生じた場合、目標走行ラインの位置が大きく変化するため車両の挙動が不安定になる可能性がある。そこで、従来装置は、特定認識状況が生じた場合、操舵角の大きさが「第1操舵角ガード値よりも小さい第2操舵角ガード値」を超えないように且つ操舵角速度の大きさが「第1操舵角速度ガード値よりも小さい第2操舵角速度ガード値」を超えないように操舵角を制御する。これにより、目標走行ラインの位置が大きく変化することにより車両の挙動が不安定になる可能性を低減できる。
【先行技術文献】
【特許文献】
【0004】
特開2019-14369号公報
【発明の概要】
【0005】
操舵制御が何らかの理由により停止した場合、操舵制御が停止しない場合に比べて、車両が物体と衝突するリスクが大きくなる。このような操舵制御の停止による衝突リスクを「停止時衝突リスク」と称呼する。このような停止時衝突リスクは、一定ではなく、車両の外部環境、車両の走行状態、及び運転者の状態等によって変化する。
【0006】
従来装置は、停止時衝突リスクを考慮して操舵制御の制御量(操舵角)の上限値(操舵角ガード値及び操舵角速度ガード値)を設定するものではない。ここで、停止時衝突リスクが一定であるとの前提で上限値が一定の値に設定されたと仮定する。この上限値が低い値に設定された場合、制御量が目標制御量と一致するまでにかかる時間が長くなる。これに起因して、操舵制御が運転者に違和感を与える可能性がある。一方、上限値が高い値に設定された場合、操舵制御が停止した場合に車両VAが他の物体と衝突する可能性を高めてしまう。
【0007】
本発明は前述した課題に対処するためになされたものである。即ち、本発明の目的の一つは、制御量が目標制御量と一致するまでにかかる時間が長くなることに起因して運転者に違和感を抱かせる可能性を低減でき、且つ、操舵制御が停止した場合に車両が他の物体と衝突する可能性を低減できる車両制御装置を提供することにある。
【0008】
本発明の運転支援装置(以下、「本発明装置」と称呼する。)は、
車両の横方向の制御量(C)を前記車両の周辺環境に基いて取得された目標制御量と一致させる操舵制御を実行する車両制御装置(10)において、
前記車両制御装置は、
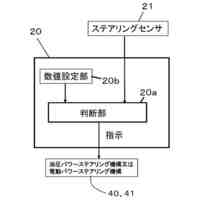
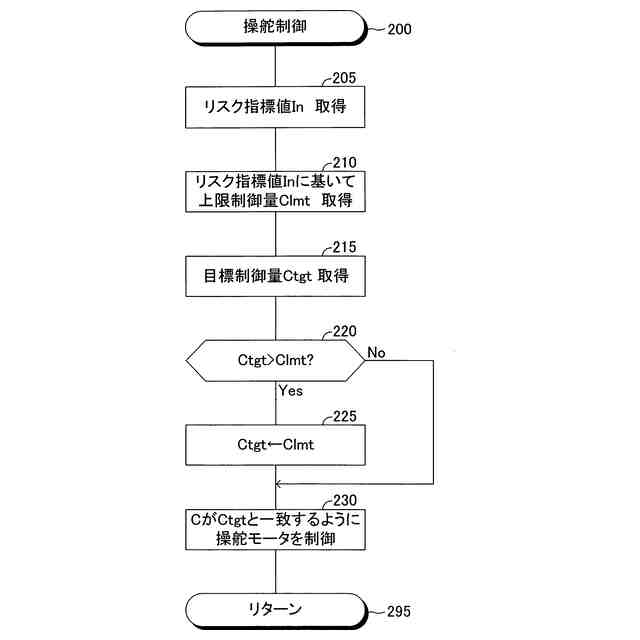
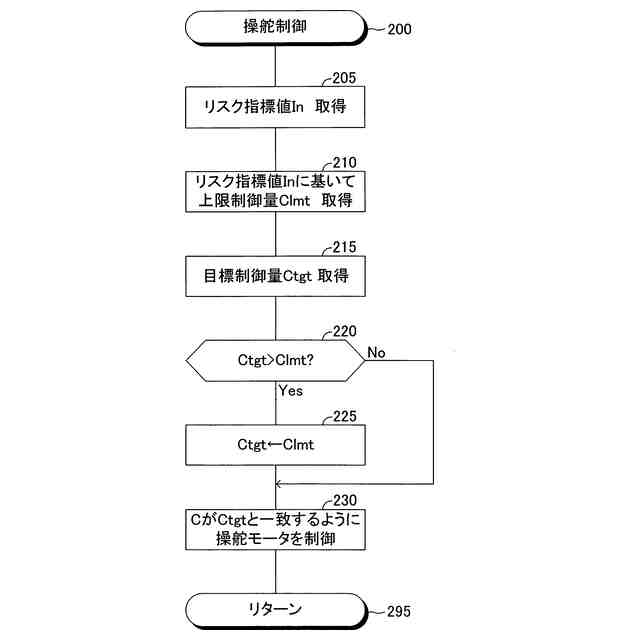
前記操舵制御を実行している場合、前記目標制御量の上限値(Clmt)を、前記操舵制御が停止したと仮定した場合に前記車両が物体と衝突する停止時衝突リスク(ステップ205)が低いほど大きな値に設定し(ステップ210)、
前記制御量が前記上限値よりも大きくならないように前記操舵制御を実行する(ステップ220乃至ステップ230)、
ように構成されている。
【0009】
本発明装置によれば、停止時衝突リスクが低いほど上限値を大きな値に設定され、制御量が上限値よりも大きくならないように操舵制御が実行される。これにより、制御量が目標制御量と一致するまでの時間が長くなる可能性を低減できるとともに、操舵制御が停止したとしても車両が他の物体と衝突する可能性を低減できる。
【図面の簡単な説明】
【0010】
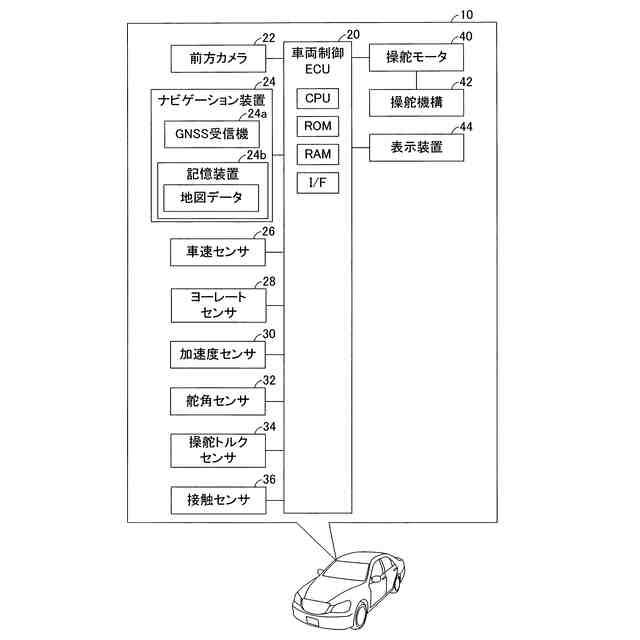
本発明の実施形態に係る運転支援装置の概略構成図である。
本発明の実施形態に係る運転支援装置の作動を説明するためのフローチャートである。
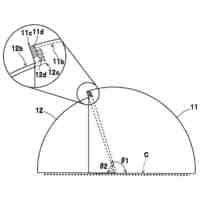
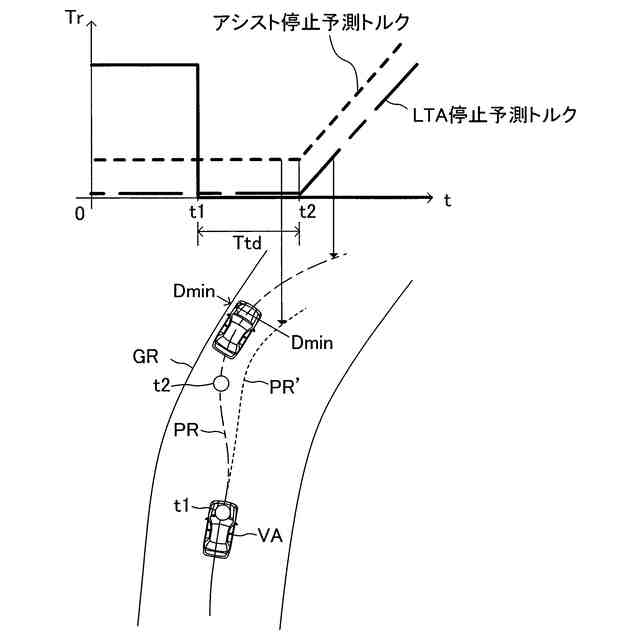
LTAが停止した場合の操舵トルクの時系列変化及びLTAが停止した場合の予測進路の説明図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
自転車の傘
5か月前
個人
重量物移動台車
2か月前
個人
サドル揺動装置
7か月前
個人
多目的運搬トレー
11か月前
個人
自動二輪車
9か月前
個人
二輪バイク補助輪
8か月前
井関農機株式会社
作業機
3か月前
個人
物品収納構造
11か月前
個人
カウル取り付け器具
9か月前
個人
自転車
8か月前
井関農機株式会社
作業機
5か月前
個人
車両用横転防止装置
3か月前
日本精機株式会社
表示装置
5か月前
井関農機株式会社
作業車両
24日前
井関農機株式会社
作業車両
8か月前
個人
クリアレインシェード
2か月前
三甲株式会社
保護具
3か月前
株式会社クラベ
面状ユニット
1か月前
個人
自転車の駐輪装置
8か月前
株式会社北誠商事
被覆構造体
4か月前
株式会社ホシプラ
台車
2か月前
個人
電動カート
9か月前
個人
車両底面への噴流発生器
9か月前
個人
スライドレインプルーフ
1か月前
個人
固定具及び自転車
11か月前
三甲株式会社
台車
3か月前
個人
自動二輪車に装着する被服
9か月前
双福鋼器株式会社
ラック
10か月前
帝人株式会社
車両構造体
1か月前
三甲株式会社
台車
5か月前
ヤマハ発動機株式会社
車両
10か月前
豊田合成株式会社
ハンドル
2か月前
豊田合成株式会社
ハンドル
10か月前
ヤマハ発動機株式会社
車両
3か月前
豊田合成株式会社
ハンドル
8か月前
井関農機株式会社
作業車両
5か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ