TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024071937
公報種別
公開特許公報(A)
公開日
2024-05-27
出願番号
2022182460
出願日
2022-11-15
発明の名称
車両制御装置
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
B60W
30/10 20060101AFI20240520BHJP(車両一般)
要約
【課題】ブレーキコントロールによる車両安定制御が作動した作動区間における車両のスタックを抑制する。
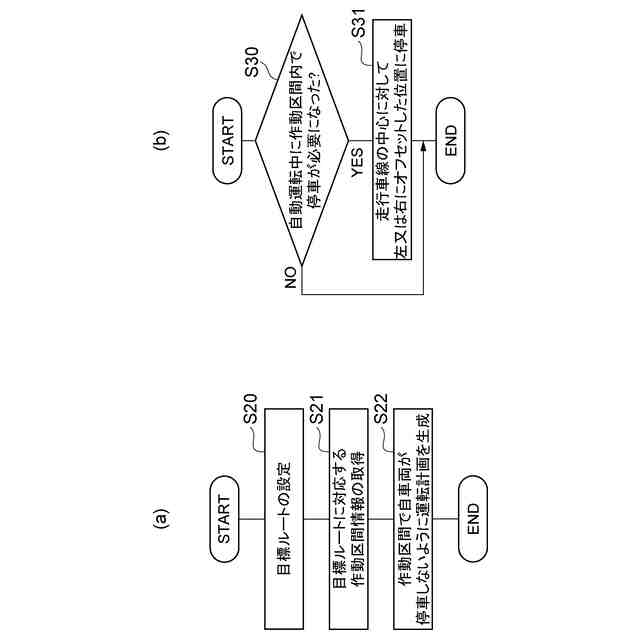
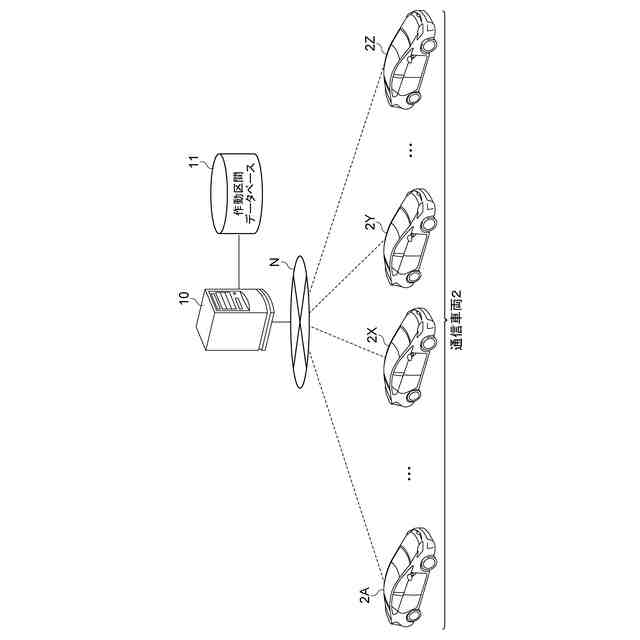
【解決手段】自車両の自動運転を実行する車両制御装置であって、過去に自動運転中の車両においてブレーキコントロールによる車両安定制御が作動した区間の情報である作動区間情報を取得する作動区間情報取得部と、予め設定された目標ルートと地図情報とに基づいて、自車両の自動運転の運転計画を生成する運転計画生成部と、運転計画に沿って自動運転を実行する車両制御部と、を備え、運転計画生成部は、作動区間において自車両が停車しないように運転計画を生成する。
【選択図】図6
特許請求の範囲
【請求項1】
自車両の自動運転を実行する車両制御装置であって、
過去に自動運転中の車両においてブレーキコントロールによる車両安定制御が作動した区間の情報である作動区間情報を取得する作動区間情報取得部と、
予め設定された目標ルートと地図情報と作動区間情報とに基づいて、前記自車両の自動運転の運転計画を生成する運転計画生成部と、
前記運転計画に沿って前記自動運転を実行する車両制御部と、
を備え、
前記運転計画生成部は、前記目標ルート上の前記作動区間において前記自車両が停車しないように前記運転計画を生成する、車両制御装置。
続きを表示(約 560 文字)
【請求項2】
前記運転計画生成部は、前記自車両が前記作動区間を一定速度で通過するように前記運転計画を生成する、請求項1に記載の車両制御装置。
【請求項3】
前記運転計画生成部は、前記作動区間が上り坂である場合、前記作動区間に進入するまでの加速により前記作動区間内で加減速を行うことなく前記自車両が前記作動区間を通過する前記運転計画を生成し、
前記作動区間が下り坂である場合、前記作動区間内で加減速することなく前記自車両が前記作動区間を通過する前記運転計画を生成する、請求項1に記載の車両制御装置。
【請求項4】
前記車両制御部は、前記自動運転の実行中に前記自車両の外部センサが検出した外部環境に基づいて前記作動区間内で前記自車両を停車させる場合、前記自車両を走行車線の中心に対して前記走行車線内で左又は右にオフセットした位置に停車させる、請求項1~3のうち何れか一項に記載の車両制御装置。
【請求項5】
前記作動区間情報は、前記車両安定制御が作動したときの天候情報と関連付けられており、
前記運転計画生成部は、現在の天候情報に応じた前記作動区間情報に絞り込んで前記運転計画の生成に用いる、請求項1~3のうち何れか一項に記載の車両制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両制御装置に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
従来、車両制御装置に関する技術文献として、特開2011-063106号公報が知られている。この公報には、自車又は他車の走行実績のある走行情報(前後Gx、横Gy、及び位置情報などを含む)に基づいて運転計画の対象となる道路の路面摩擦度を推定し、推定した路面摩擦度に基づいてタイヤ発生力を算出し、算出したタイヤ発生力を超えない条件で運転計画を生成することが示されている。
【先行技術文献】
【特許文献】
【0003】
特開2011-063106号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述した従来の装置において、道路の路面摩擦度が低い区間で車両を停車してしまうと、発進しようとした際に実際の路面摩擦度が推定値より低く、車両がスタックする可能性がある。
【課題を解決するための手段】
【0005】
本発明の一態様は、自車両の自動運転を実行する車両制御装置であって、過去に自動運転中の車両においてブレーキコントロールによる車両安定制御が作動した区間の情報である作動区間情報を取得する作動区間情報取得部と、予め設定された目標ルートと地図情報とに基づいて、自車両の自動運転の運転計画を生成する運転計画生成部と、運転計画に沿って自動運転を実行する車両制御部と、を備え、運転計画生成部は、作動区間において自車両が停車しないように運転計画を生成する。
【0006】
上記の車両制御装置において、運転計画生成部は、自車両が作動区間を一定速度で通過するように運転計画を生成してもよい。
【0007】
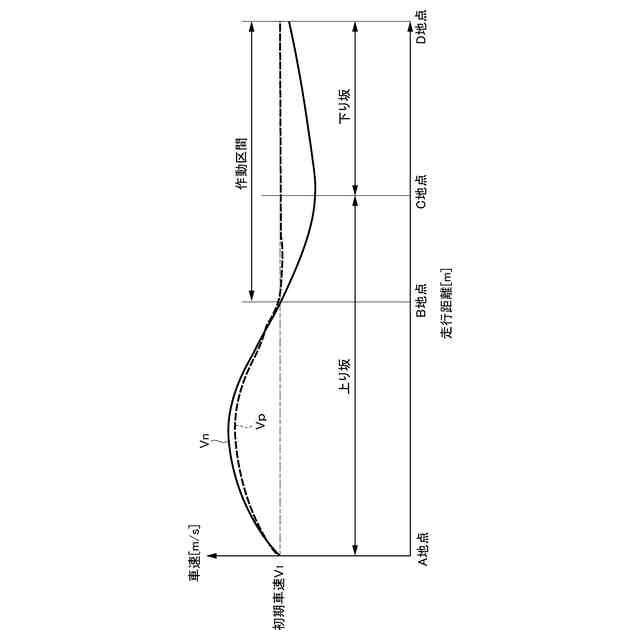
上記の車両制御装置において、運転計画生成部は、作動区間が上り坂である場合、作動区間に進入するまでの加速により作動区間内で加減速を行うことなく自車両が作動区間を通過する運転計画を生成し、作動区間が下り坂である場合、作動区間内で加減速することなく自車両が作動区間を通過する運転計画を生成してもよい。
【0008】
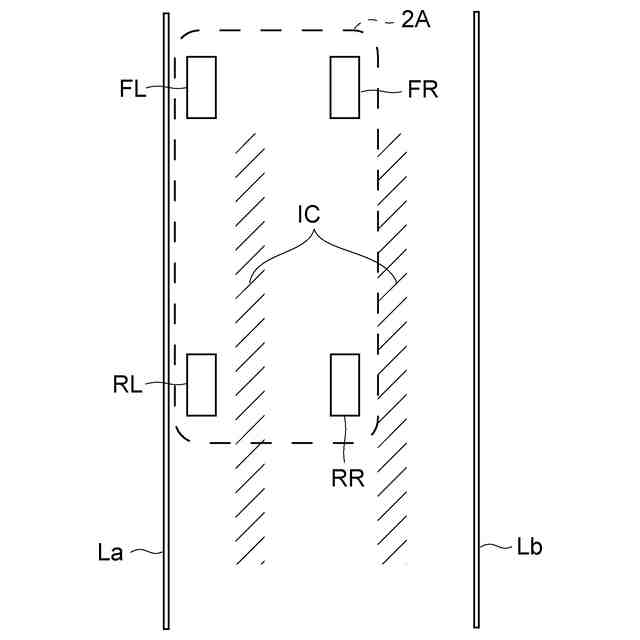
上記の車両制御装置において、車両制御部は、自動運転の実行中に自車両の外部センサが検出した外部環境に基づいて作動区間内で自車両を停車させる場合、自車両を走行車線の中心に対して走行車線内で左又は右にオフセットした位置に停車させてもよい。
【0009】
上記の車両制御装置において、作動区間情報は、車両安定制御が作動したときの天候情報と関連付けられており、運転計画生成部は、現在の天候情報に応じた作動区間情報に絞り込んで運転計画の生成に用いてもよい。
【発明の効果】
【0010】
本発明の一態様によれば、ブレーキコントロールによる車両安定制御が作動した作動区間において自車両が停車しないように運転計画を生成することができるので、作動区間における車両のスタックを抑制することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
スーパーEV
3か月前
個人
設置部材
1か月前
個人
骨組み型熱交換器
1か月前
個人
車内雨傘載置収納具
1か月前
個人
自動車暴走抑制装置
2か月前
井関農機株式会社
作業車両
1か月前
日本精機株式会社
表示装置
1か月前
株式会社タイヨー産業
補助枕
1か月前
東レ株式会社
フロントグリル
2か月前
個人
キャンピングトレーラー
7日前
日本精機株式会社
表示システム
26日前
株式会社SUBARU
車両
2か月前
株式会社SUBARU
車両
2か月前
株式会社SUBARU
車両
2か月前
オクト産業株式会社
自動車
2か月前
トヨタ自動車株式会社
車両
18日前
トヨタ自動車株式会社
車両
18日前
井関農機株式会社
作業車両
2か月前
トヨタ自動車株式会社
車両
2か月前
トヨタ自動車株式会社
車両
3か月前
トヨタ自動車株式会社
車両
2か月前
井関農機株式会社
作業車両
3か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
3か月前
井関農機株式会社
作業車両
3か月前
井関農機株式会社
作業車両
12日前
トヨタ自動車株式会社
車両
28日前
個人
視認ペダル操作システム
4日前
株式会社ニフコ
カップホルダ
1か月前
株式会社クボタ
作業車
1か月前
新明和工業株式会社
作業車両
2か月前
株式会社クボタ
作業車
1か月前
新明和工業株式会社
荷箱の天蓋装置
2か月前
株式会社コーワ
フィルター清掃装置
4日前
日本化薬株式会社
ガス発生器
3か月前
カヤバ株式会社
シリンダ装置
2か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ