TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024059228
公報種別
公開特許公報(A)
公開日
2024-05-01
出願番号
2022166778
出願日
2022-10-18
発明の名称
車両制御装置、車両制御方法及び車両制御用コンピュータプログラム
出願人
トヨタ自動車株式会社
,
株式会社デンソー
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
B60W
30/02 20120101AFI20240423BHJP(車両一般)
要約
【課題】車両の進路上に検出することが難しい物体が存在しても、車両を安全に制御することが可能な車両制御装置を提供する。
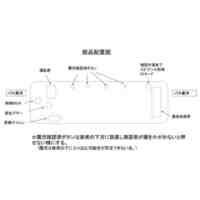
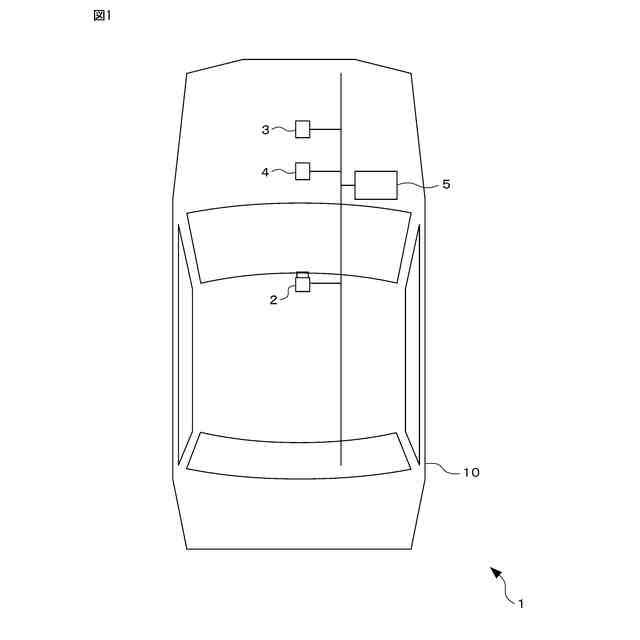
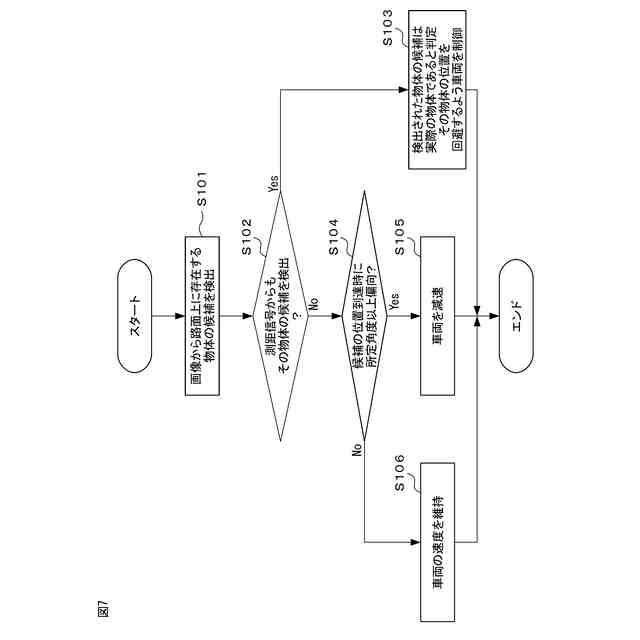
【解決手段】車両制御装置は、車両10に設けられた撮像部により生成された車両10の周囲を表す画像から車両10の前方の路面上に存在する物体401の候補を検出する検出部と、検出された物体401の候補の位置に車両10が到達したときに、車両10の向きが所定角度以上偏向したか否か判定する判定部と、車両10の向きが所定角度以上偏向した場合、車両10を減速するよう制御する車両制御部とを有する。
【選択図】図4
特許請求の範囲
【請求項1】
車両に設けられた撮像部により生成された前記車両の周囲を表す画像から、前記車両の前方の路面上に存在する物体の候補を検出する検出部と、
検出された前記物体の候補の位置に前記車両が到達したときに、前記車両の向きが所定角度以上偏向したか否か判定する判定部と、
前記車両の向きが前記所定角度以上偏向した場合、前記車両を減速するよう制御する車両制御部と、
を有する車両制御装置。
続きを表示(約 690 文字)
【請求項2】
前記検出部は、前記車両に搭載された測距センサにより生成された測距信号から前記物体の候補をさらに検出できるか否か判定し、
前記車両制御部は、前記測距信号から前記物体の候補を検出できない場合において前記車両の向きが前記所定角度以上偏向した場合、前記車両を減速するよう制御する、請求項1に記載の車両制御装置。
【請求項3】
前記車両制御部は、前記測距信号からも前記物体の候補が検出された場合、前記物体の候補の位置を前記車両が回避するように前記車両を制御する、請求項2に記載の車両制御装置。
【請求項4】
車両に設けられた撮像部により生成された前記車両の周囲を表す画像から、前記車両の前方の路面上に存在する物体の候補を検出し、
検出された前記物体の候補の位置に前記車両が到達したときに、前記車両の向きが所定角度以上偏向したか否か判定し、
前記車両の向きが前記所定角度以上偏向した場合、前記車両を減速するよう制御する、
ことを含む車両制御方法。
【請求項5】
車両に設けられた撮像部により生成された前記車両の周囲を表す画像から、前記車両の前方の路面上に存在する物体の候補を検出し、
検出された前記物体の候補の位置に前記車両が到達したときに、前記車両の向きが所定角度以上偏向したか否か判定し、
前記車両の向きが前記所定角度以上偏向した場合、前記車両を減速するよう制御する、
ことを前記車両に搭載されたプロセッサに実行させるための車両制御用コンピュータプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両を制御する車両制御装置、車両制御方法及び車両制御用コンピュータプログラムに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
車両に搭載されたセンサにより得られたセンサ信号から車両の周囲に存在する障害物を検知し、その検知結果を車両の自動運転制御に利用する技術が提案されている(特許文献1を参照)。
【0003】
特許文献1に記載された車両制御システムは、車両の進行方向における障害の分布状態を認識し、認識した障害の分布状態に基づいて、車両の車輪ごとの目標軌道を決定する。そしてこの車両制御システムは、目標軌道に沿って車両の自動運転を実行する。
【先行技術文献】
【特許文献】
【0004】
国際公開第2018/179359号
【発明の概要】
【発明が解決しようとする課題】
【0005】
車両の進路上に存在する障害物が、落下物あるいはポットホールである場合のように、形状、色及びサイズが予め特定されないような物体であることがある。このような物体については、車両に搭載されたセンサにより得られるセンサ信号から精度良く検出できないことがある。その結果として、適切な車両の制御が実行されないことがある。
【0006】
そこで、本発明は、車両の進路上に検出することが難しい物体が存在しても、車両を安全に制御することが可能な車両制御装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
一つの実施形態によれば、車両制御装置が提供される。この車両制御装置は、車両に設けられた撮像部により生成された車両の周囲を表す画像から車両の前方の路面上に存在する物体の候補を検出する検出部と、検出された物体の候補の位置に車両が到達したときに、車両の向きが所定角度以上偏向したか否か判定する判定部と、車両の向きが所定角度以上偏向した場合、車両を減速するよう制御する車両制御部とを有する。
【0008】
この車両制御装置において、検出部は、車両に搭載された測距センサにより生成された測距信号から物体の候補をさらに検出できるか否か判定し、車両制御部は、測距信号から物体の候補を検出できない場合において車両の向きが所定角度以上偏向した場合、車両を減速するよう制御することが好ましい。
【0009】
この場合において、車両制御部は、測距信号からも物体の候補が検出された場合、物体の候補の位置を車両が回避するように車両を制御することが好ましい。
【0010】
他の実施形態によれば、車両制御方法が提供される。この車両制御方法は、車両に設けられた撮像部により生成された車両の周囲を表す画像から車両の前方の路面上に存在する物体の候補を検出し、検出された物体の候補の位置に車両が到達したときに、車両の向きが所定角度以上偏向したか否か判定し、車両の向きが所定角度以上偏向した場合、車両を減速するよう制御する、ことを含む。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
スーパーEV
2か月前
個人
設置部材
6日前
個人
骨組み型熱交換器
21日前
個人
車内雨傘載置収納具
1日前
個人
自動車暴走抑制装置
28日前
日本精機株式会社
表示装置
6日前
井関農機株式会社
作業車両
14日前
株式会社タイヨー産業
補助枕
2日前
東レ株式会社
フロントグリル
28日前
個人
断熱構造体とその製造方法
2か月前
井関農機株式会社
作業車両
1か月前
株式会社SUBARU
車両
1か月前
株式会社SUBARU
車両
1か月前
日本精機株式会社
車両用表示装置
2か月前
株式会社SUBARU
車両
1か月前
オクト産業株式会社
自動車
1か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
2か月前
トヨタ自動車株式会社
車両
1か月前
トヨタ自動車株式会社
車両
1か月前
井関農機株式会社
作業車両
2か月前
トヨタ自動車株式会社
車両
1か月前
井関農機株式会社
作業車両
1か月前
カヤバ株式会社
シリンダ装置
1か月前
株式会社クボタ
作業車
1日前
株式会社ニフコ
カップホルダ
2日前
日本化薬株式会社
ガス発生器
2か月前
新明和工業株式会社
荷箱の天蓋装置
1か月前
新明和工業株式会社
作業車両
1か月前
株式会社クボタ
作業車
1日前
豊田合成株式会社
乗員保護装置
2か月前
豊田合成株式会社
乗員保護装置
2か月前
ダイハツ工業株式会社
搬送装置
23日前
豊田合成株式会社
乗員保護装置
2か月前
豊田合成株式会社
乗員保護装置
2か月前
豊田合成株式会社
乗員保護装置
2か月前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ