TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024058091
公報種別
公開特許公報(A)
公開日
2024-04-25
出願番号
2022165238
出願日
2022-10-14
発明の名称
運転支援装置
出願人
トヨタ自動車株式会社
代理人
弁理士法人プロスペック特許事務所
主分類
B60W
30/16 20200101AFI20240418BHJP(車両一般)
要約
【課題】距離精度が高い認識方法を用いて物体距離を取得できなくなった場合であっても、精度の高い運転支援制御を実行可能な運転支援装置を提供する。
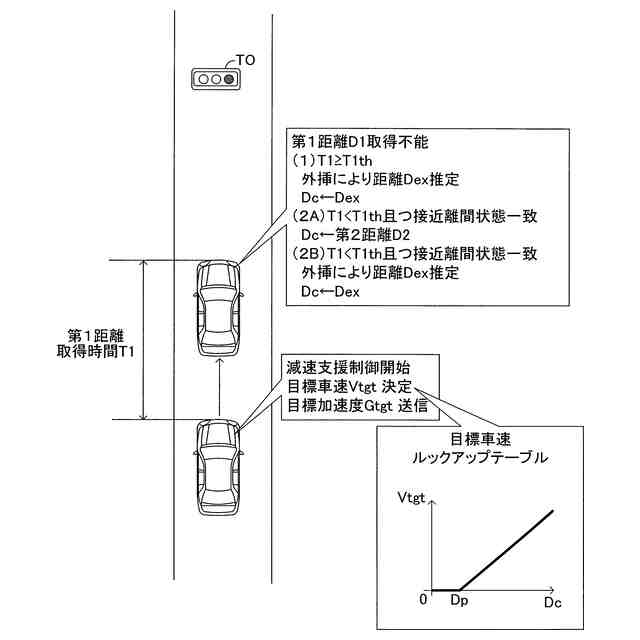
【解決手段】運転支援装置は、車両から対象物体までの物体距離を特定可能なセンサ情報を取得するように構成されたセンサと、センサ情報に第1認識方法を用いて取得した物体距離を表す第1距離を制御距離に用いて運転支援制御を実行するコントローラと、を備える。第1認識方法は、第1距離の取得時間が長くなるにつれて対象物体の認識信頼度が高くなる、との特性を有する。コントローラは、第1距離を取得できなくなり且つ第1距離を取得していた取得時間が所定の閾値時間以上である場合、既に取得している第1距離及び車速に基いて推定した物体距離を表す外挿距離を、制御距離に用いるように構成されている。
【選択図】 図2
特許請求の範囲
【請求項1】
車両と物体との間の距離を特定可能なセンサ情報を取得するセンサと、
前記センサ情報に第1認識方法を適用することにより取得した前記車両と所定の対象物体との間の距離を表す第1距離を制御距離に採用し、前記制御距離に基いて所定の運転支援制御を実行するコントローラと、を備え、
前記第1認識方法は、前記第1距離の取得時間が長くなるにつれて前記対象物体の認識信頼度が高くなる、との特性を有し、
前記コントローラは、前記第1距離を取得できなくなった場合、前記取得時間が所定の閾値時間以上であれば、既に取得した前記第1距離を表す既取得距離及び前記車両の速度に基いて推定した物体距離を表す外挿距離を、前記制御距離として採用するように構成された、運転支援装置。
続きを表示(約 1,000 文字)
【請求項2】
請求項1に記載の運転支援装置において、
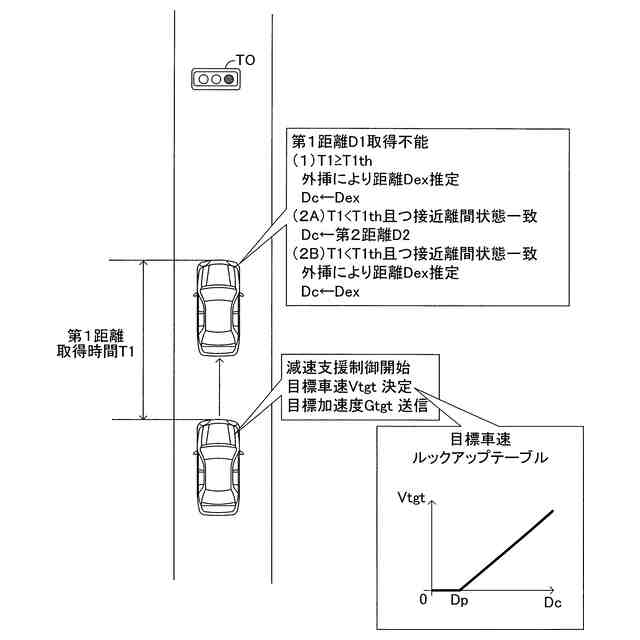
前記コントローラは、前記第1距離を取得できなくなり且つ前記取得時間が前記閾値時間未満である場合、前記車両の進行方向に基いて特定される、前記第1認識方法よりも距離精度が低い第2認識方法を前記センサ情報に適用することにより認識した前記対象物体が接近するか離間するかを表す第1接近離間状態と、前記第2認識方法を前記センサ情報に用いて取得した前記車両と前記対象物体との距離を表す第2距離に基いて特定される前記対象物体が接近するか離間するかを表す第2接近離間状態と、が一致すれば、前記第2距離を前記制御距離に用いるように構成された、運転支援装置。
【請求項3】
請求項1に記載の運転支援装置において、
前記コントローラは、前記第1距離を取得できなくなり且つ前記取得時間が前記閾値時間未満である場合、前記第1距離を取得できなくなり且つ前記取得時間が前記閾値時間未満である場合、前記車両の進行方向に基いて特定される、前記第1認識方法よりも距離精度が低い第2認識方法を前記センサ情報に適用することにより認識した前記対象物体が接近するか否か離間するかを表す第1接近離間状態と、前記第2認識方法を前記センサ情報に用いて取得した前記車両と前記対象物体との距離を表す第2距離に基いて特定される前記対象物体が接近するか離間するかを表す第2接近離間状態と、が一致しなければ、前記外挿距離を前記制御距離に用いるように構成された、運転支援装置。
【請求項4】
請求項1に記載の運転支援装置において、
前記コントローラは、
前記第1距離を取得できなくなり且つ前記取得時間が前記閾値時間未満である場合、前記外挿距離、及び、前記第1認識方法よりも距離精度が低い第2認識方法を前記センサ情報に適用することにより取得した前記車両と前記対象物体との距離を表す第2距離に基いて、前記制御距離を決定し、
前記取得時間が長いほど、前記外挿距離の重みを大きくし且つ前記第2距離の重みを小さくする、
ように構成された、運転支援装置。
【請求項5】
請求項1乃至請求項4の何れか一つに記載の運転支援装置において、
前記コントローラは、前記車両が前記対象物体の所定距離手前で停車するように前記車両の走行状態を前記制御距離に基いて制御するように構成された、運転支援装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両と対象物体との間の距離に基いて運転支援制御を実行する運転支援装置に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
従来から、車両と対象物体との間の距離に基いて運転支援制御を実行する運転支援装置が知られている。例えば、特許文献1に記載の運転支援装置(以下、「従来装置」と称呼する。)は、外部センサ(例えばカメラ)の検出結果に基いて対象物体を特定し、車両と対象物体との間の距離(物体距離)に基いて減速支援開始条件が成立したか否かを判定する。従来装置は、減速支援開始条件が成立した場合、減速支援制御を運転支援制御として実行する。詳細には、従来装置は、対象物体の確からしさを表す検出信頼度を算出し、検出信頼度が高いほど、減速支援制御の支援量を大きくする。
【先行技術文献】
【特許文献】
【0003】
特開2021-88289号公報
【発明の概要】
【0004】
従来装置は、検出信頼度が高い状態から低い状態へと変化した場合、対象物体でない他の物体に対して減速支援制御が行われる可能性が高くなる。運転者は、対象物体でない他の物体に対して行われた減速支援制御を煩わしく感じる可能性が高い。
【0005】
本発明は前述した課題に対処するためになされたものである。即ち、本発明の目的の一つは、対象物体でない物体に対して運転支援制御が行われる可能性を低減することにより運転者が運転支援制御に対して煩わしさを感じる可能性を低減できる運転支援装置を提供することにある。
【0006】
本発明の運転支援装置(以下、「本発明装置」と称呼する。)は、
車両と物体との間の距離を特定可能なセンサ情報を取得するセンサ(22)と、
前記センサ情報に第1認識方法を適用することにより取得した前記車両と所定の対象物体との間の距離を表す第1距離を制御距離に採用し、前記制御距離に基いて所定の運転支援制御を実行するコントローラ(20)と、を備え、
前記第1認識方法は、前記第1距離の取得時間が長くなるにつれて前記対象物体の認識信頼度が高くなる、との特性を有し、
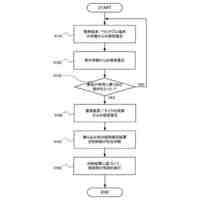
前記コントローラは、前記第1距離を取得できなくなった場合(ステップ425「No」)、前記取得時間が所定の閾値時間以上であれば(ステップ455「Yes」)、既に取得した前記第1距離を表す既取得距離及び前記車両の速度に基いて推定した物体距離を表す外挿距離を、前記制御距離として採用するように構成されている(ステップ460、ステップ465)。
【0007】
第1認識方法は、第1距離の取得時間が長くなるにつれて対象物体の認識信頼度が高くなる、との特性を有している。本発明装置によれば、第1距離が取得できなかった場合に取得時間が閾値時間以上であれば、外挿距離を制御距離として採用する。つまり、対象物体の認識信頼度が所定の信頼度以上である場合に(即ち、対象物体でない物体を対象物体であると誤認識する可能性が低い場合に)外挿距離が制御距離として採用される。このため、対象物体である可能性が高い物体の外挿距離が制御距離として採用されるので、対象物体でない物体に対して運転支援制御が行われる可能性を低減でき、運転者が運転支援制御に対して煩わしさを感じる可能性を低減できる。もし、取得時間が閾値時間未満である場合に外挿距離が制御距離として採用されると、対象物体でない物体の外挿距離が制御距離として採用され続ける可能性が高くなり、対象物体でない物体に対して運転支援制御が実行される可能性が高くなる。
【図面の簡単な説明】
【0008】
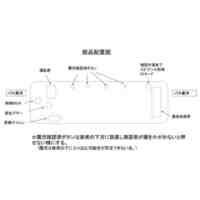
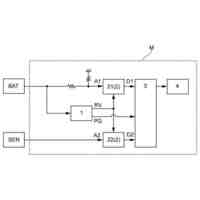
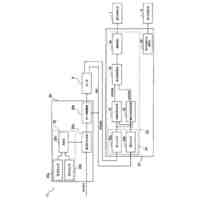
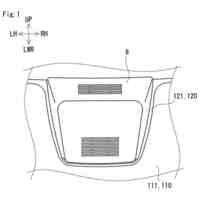
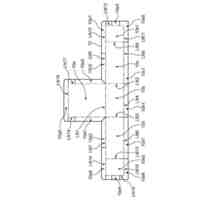
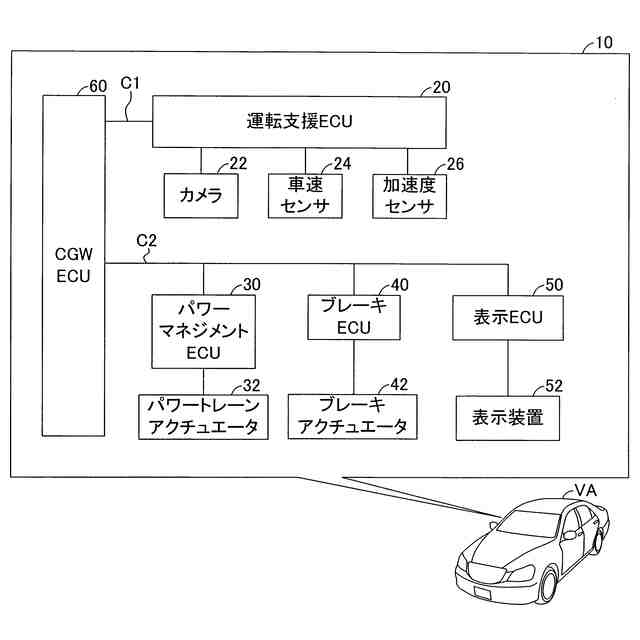
本発明の実施形態に係る運転支援装置の概略システム構成図である。
運転支援装置の作動の説明図である。
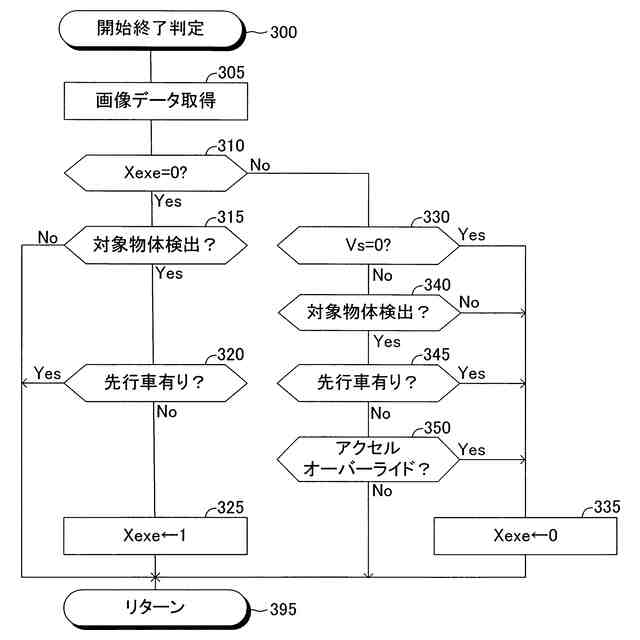
運転支援ECUのCPUが実行するプログラムのフローチャートである。
運転支援ECUのCPUが実行するプログラムのフローチャートである。
第1変形例に係る運転支援ECUのCPUが実行するプログラムのフローチャートである。
【発明を実施するための形態】
【0009】
本発明の実施形態に係る運転支援装置(本支援装置10)は、車両VAに適用され、図1に示した構成要素を備える。
【0010】
運転支援ECUは運転支援制御を実行するECUであり、以下、「ECU20」と表記する。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
個人
スーパーEV
1か月前
個人
骨組み型熱交換器
11日前
個人
自動車暴走抑制装置
18日前
井関農機株式会社
作業車両
4日前
東レ株式会社
フロントグリル
18日前
オクト産業株式会社
自動車
1か月前
井関農機株式会社
作業車両
1か月前
株式会社SUBARU
車両
28日前
井関農機株式会社
作業車両
1か月前
株式会社SUBARU
車両
28日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
株式会社SUBARU
車両
28日前
トヨタ自動車株式会社
車両
1か月前
トヨタ自動車株式会社
車両
1か月前
日本精機株式会社
車両用表示装置
2か月前
井関農機株式会社
作業車両
1か月前
トヨタ自動車株式会社
車両
1か月前
新明和工業株式会社
荷箱の天蓋装置
25日前
新明和工業株式会社
作業車両
1か月前
日本化薬株式会社
ガス発生器
2か月前
カヤバ株式会社
シリンダ装置
28日前
豊田合成株式会社
乗員保護装置
2か月前
豊田合成株式会社
乗員保護装置
2か月前
豊田合成株式会社
乗員保護装置
2か月前
豊田合成株式会社
乗員保護装置
2か月前
ダイハツ工業株式会社
搬送装置
13日前
豊田合成株式会社
乗員保護装置
2か月前
豊田合成株式会社
乗員保護装置
2か月前
オムロン株式会社
表示システム
11日前
株式会社アイシン
給気装置
18日前
株式会社SUBARU
車両用ドア
4日前
ダイハツ工業株式会社
ブラケット
11日前
デルタ工業株式会社
シート
19日前
株式会社岡田製作所
ラゲッジネット
28日前
株式会社SUBARU
車両用シート
20日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ