TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024039134
公報種別
公開特許公報(A)
公開日
2024-03-22
出願番号
2022143462
出願日
2022-09-09
発明の名称
車両制御装置及び車両制御方法
出願人
マツダ株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
B60W
30/09 20120101AFI20240314BHJP(車両一般)
要約
【課題】車両と障害物との安全な距離を確保しつつ、乗員に煩わしさを感じさせることを防止できる、車両制御装置及び方法を提供する。
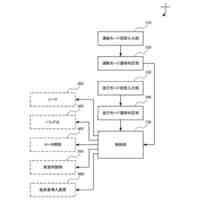
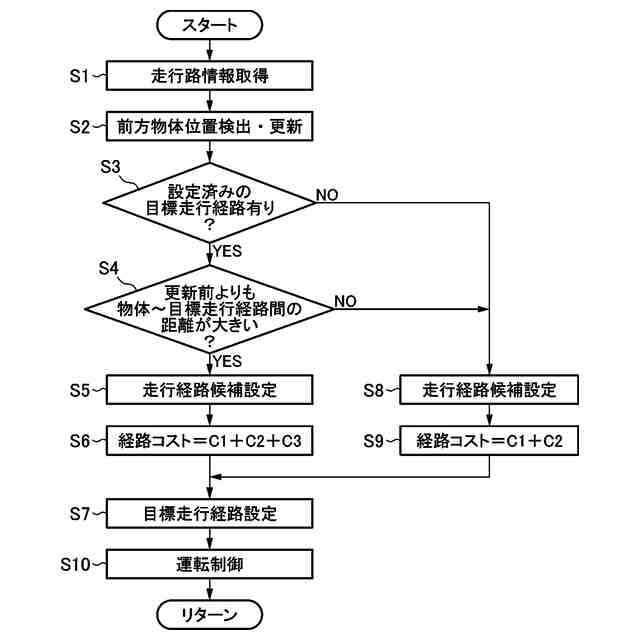
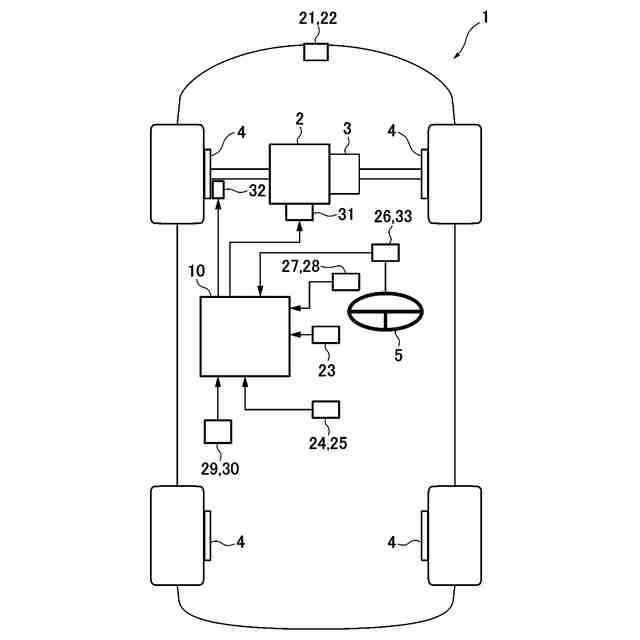
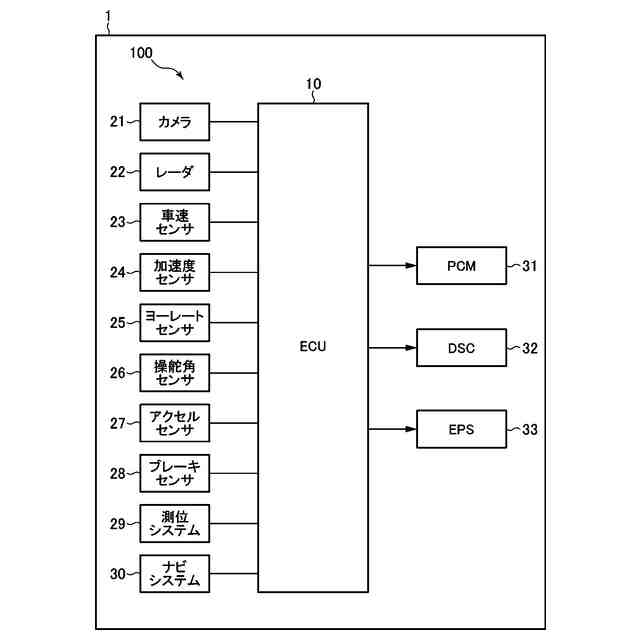
【解決手段】車両制御装置(100)は、車両(1)の走行路(6)に関する走行路情報を取得するカメラ(21)、レーダ(22)、ナビゲーションシステム(30)と、車両の前方の物体(OB)の位置を検出し、当該位置を繰り返し更新するカメラ、レーダと、走行路情報及び物体の位置に基づき走行路における目標走行経路を繰り返し設定し、目標走行経路に沿って車両が走行するように、車両を制御するように構成されたECU(10)とを備え、ECUは、カメラ、レーダによる更新後の物体の位置と、更新前の物体の位置に基づき設定されている目標走行経路との距離が、更新前の物体の位置と設定されている目標走行経路との距離よりも大きい場合、設定されている目標走行経路よりも物体に近い領域に、次の目標走行経路が設定され難くするように構成されている。
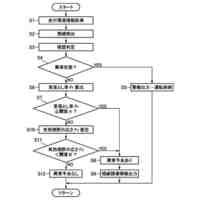
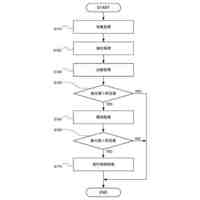
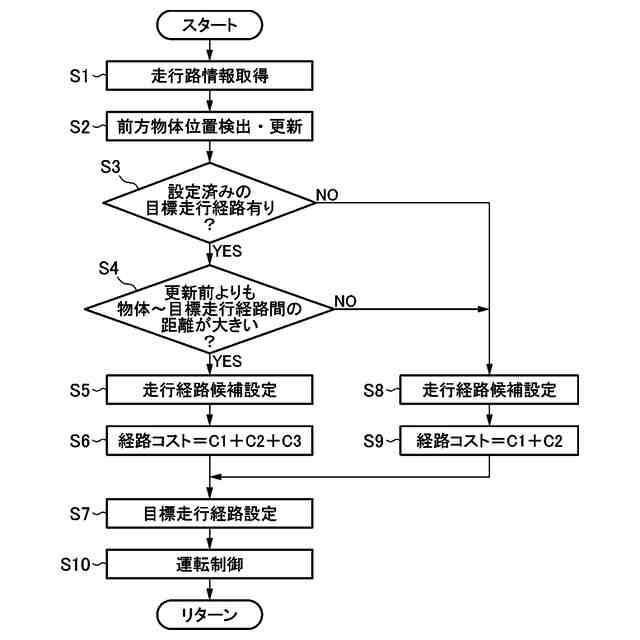
【選択図】図9
特許請求の範囲
【請求項1】
車両の走行路に関する走行路情報を取得する走行路情報取得装置と、
前記車両の前方の物体の位置を検出し、当該位置を繰り返し更新する物体検出装置と、
前記走行路情報及び前記物体の位置に基づき前記走行路における目標走行経路を繰り返し設定し、前記目標走行経路に沿って前記車両が走行するように、前記車両を制御するように構成されたコントローラと、を備え、
前記コントローラは、前記物体検出装置による更新後の前記物体の位置と、更新前の当該物体の位置に基づき設定されている前記目標走行経路との距離が、更新前の当該物体の位置と当該設定されている目標走行経路との距離よりも大きい場合、当該設定されている目標走行経路よりも当該物体に近い領域に、次の目標走行経路が設定され難くするように構成されている、
車両制御装置。
続きを表示(約 1,700 文字)
【請求項2】
車両の走行路に関する走行路情報を取得する走行路情報取得装置と、
前記車両の前方の物体の位置を検出し、当該位置を繰り返し更新する物体検出装置と、
前記走行路情報及び前記物体の位置に基づき前記走行路における目標走行経路を繰り返し設定し、前記目標走行経路に沿って前記車両が走行するように、前記車両を制御するように構成されたコントローラと、を備え、
前記コントローラは、前記物体検出装置による更新後の前記物体の位置と、更新前の当該物体の位置に基づき設定されている前記目標走行経路との距離が、更新前の当該物体の位置と当該設定されている目標走行経路との距離よりも大きい場合、当該設定されている目標走行経路よりも当該物体に近い領域を、次の目標走行経路が設定される領域から除外するように構成されている、
車両制御装置。
【請求項3】
前記コントローラは、
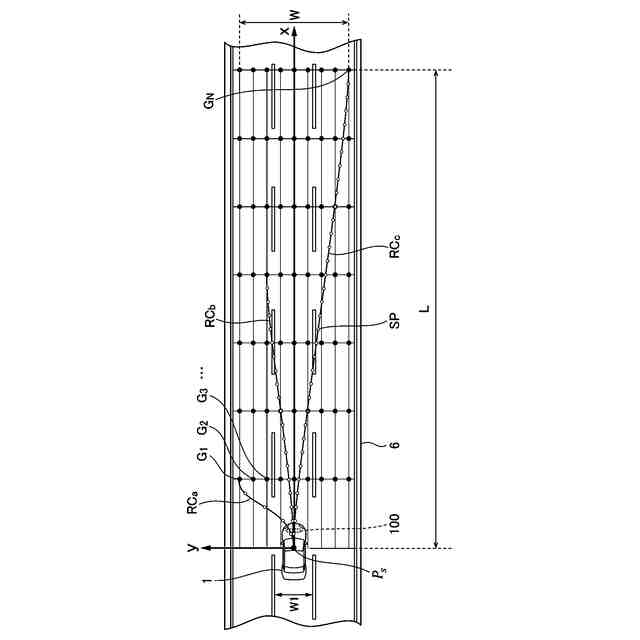
前記走行路情報に基づいて、前記目標走行経路を設定するための候補となる複数の走行経路候補を設定し、
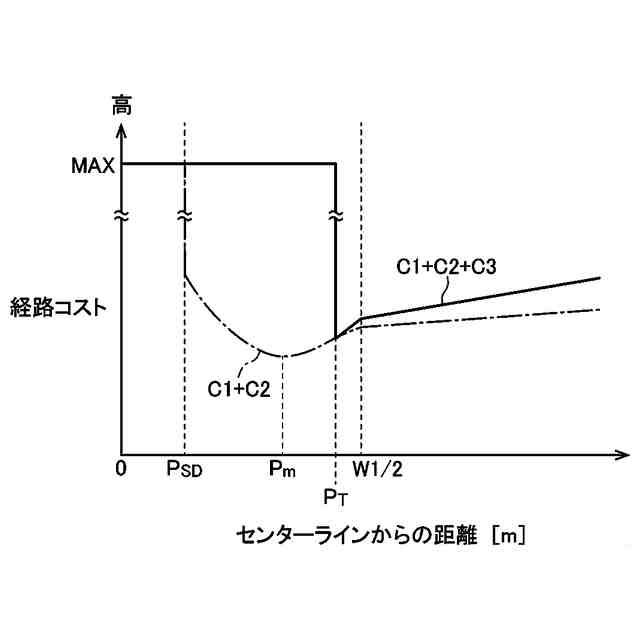
前記走行路情報及び前記車両の前方の物体の位置に基づいて、前記複数の走行経路候補のそれぞれについて経路コストを求め、
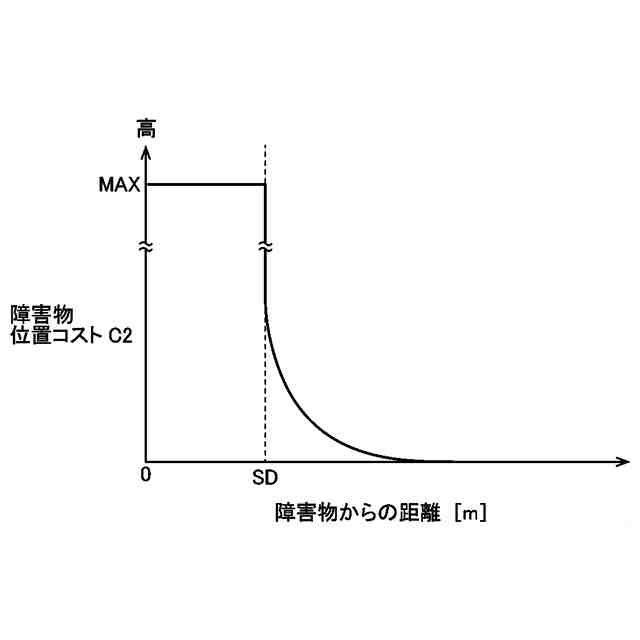
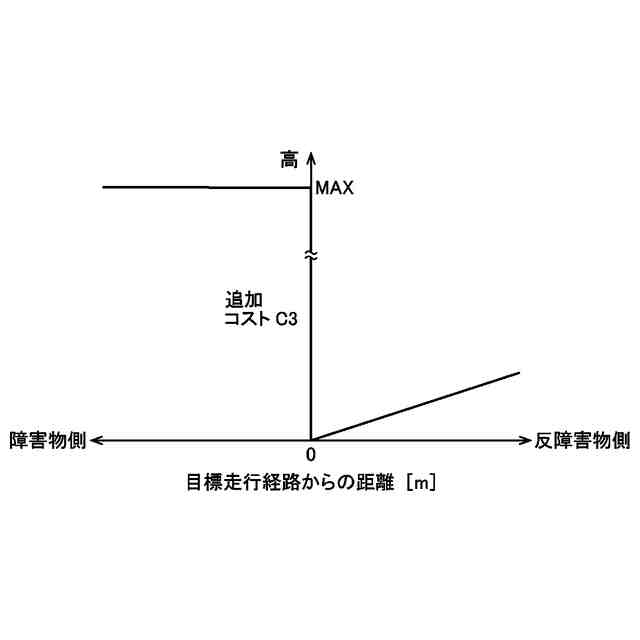
前記物体の位置と前記走行経路候補との距離が小さいほど、当該走行経路候補の経路コストを高くし、
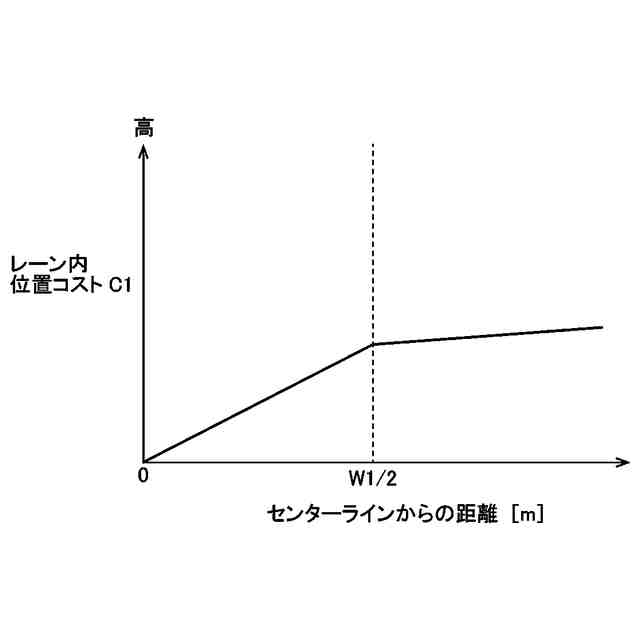
前記走行路において前記車両が走行する自車レーンのセンターラインと前記走行経路候補との距離が大きいほど、当該走行経路候補の経路コストを高くし、
前記複数の走行経路候補の内、前記経路コストが最小の走行経路候補を前記目標走行経路として設定し、
前記物体検出装置による更新後の前記物体の位置と、更新前の当該物体の位置に基づき設定されている前記目標走行経路との距離が、更新前の当該物体の位置と当該設定されている目標走行経路との距離よりも大きい場合、当該設定されている目標走行経路よりも当該物体に近い領域を通る走行経路候補の経路コストを、当該設定されている目標走行経路を通る走行経路候補の経路コストより高くするように構成されている、
請求項1又は2に記載の車両制御装置。
【請求項4】
コンピュータを備える制御装置により実行される車両制御方法であって、
車両の走行路に関する走行路情報を取得するステップと、
前記車両の前方の物体の位置を検出し、当該位置を繰り返し更新するステップと、
前記走行路情報及び前記物体の位置に基づき前記走行路における目標走行経路を繰り返し設定するステップと、
前記目標走行経路に沿って前記車両が走行するように、前記車両を制御するステップと、を有し、
前記目標走行経路を設定するステップは、前記物体の位置を繰り返し更新するステップにおける更新後の前記物体の位置と、更新前の当該物体の位置に基づき設定されている前記目標走行経路との距離が、更新前の当該物体の位置と当該設定されている目標走行経路との距離よりも大きい場合、当該設定されている目標走行経路よりも当該物体に近い領域に、次の目標走行経路が設定され難くするステップを含む、
車両制御方法。
【請求項5】
コンピュータを備える制御装置により実行される車両制御方法であって、
車両の走行路に関する走行路情報を取得するステップと、
前記車両の前方の物体の位置を検出し、当該位置を繰り返し更新するステップと、
前記走行路情報及び前記物体の位置に基づき前記走行路における目標走行経路を繰り返し設定するステップと、
前記目標走行経路に沿って前記車両が走行するように、前記車両を制御するステップと、を有し、
前記目標走行経路を設定するステップは、前記物体の位置を繰り返し更新するステップにおける更新後の前記物体の位置と、更新前の当該物体の位置に基づき設定されている前記目標走行経路との距離が、更新前の当該物体の位置と当該設定されている目標走行経路との距離よりも大きい場合、当該設定されている目標走行経路よりも当該物体に近い領域を、次の目標走行経路が設定される領域から除外するステップを含む、
車両制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両のための走行経路を設定し、この走行経路に基づき車両の制御を行う車両制御装置及び車両制御方法に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
従来、車両の自動運転を実行するために、車両の外界の認識結果に基づいて車両の移動経路を計画し、外界の障害物の認識結果に基づいてその計画された移動経路を補正し、補正された移動経路に基づいて車両の走行を制御する制御装置が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2021-146905号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
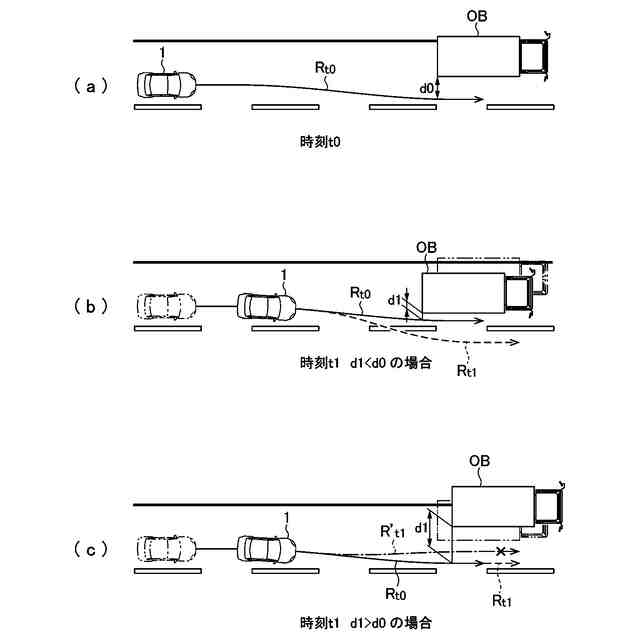
特許文献1に記載されているような従来の技術においては、カメラやレーダ等のセンサを用いて障害物を認識しており、障害物に接近するほどその位置や形状をより正確に検出することが可能になる。したがって、計画された移動経路に沿って車両が進行し、障害物に接近するにつれて、障害物と移動経路との距離が想定より近いことや遠いことが判明する場合がある。
【0005】
従来の技術においては、障害物を回避しつつ走行車線のセンター位置に沿って走行するように移動経路が設定されている場合において、車両の進行につれて障害物の位置が想定より移動経路に近いことが判明すると、更新された障害物の位置から遠ざかるように移動経路が補正され、障害物の位置が想定より移動経路から遠いことが判明すると、走行車線のセンター位置に近づくように移動経路が補正される。このように、車両の進行につれて障害物の位置が更新される度に移動経路が補正されると、移動経路の補正に応じて車両制御が実行されることにより車両の挙動変化が頻繁に発生し、乗員に煩わしさを感じさせてしまう。
【0006】
本発明は、このような問題を解決するためになされたものであり、車両と障害物との安全な距離を確保しつつ、乗員に煩わしさを感じさせることを防止可能な、車両制御装置及び車両制御方法を提供することを目的としている。
【課題を解決するための手段】
【0007】
上述した課題を解決するために、本発明は、車両制御装置であって、車両の走行路に関する走行路情報を取得する走行路情報取得装置と、車両の前方の物体の位置を検出し、当該位置を繰り返し更新する物体検出装置と、走行路情報及び物体の位置に基づき走行路における目標走行経路を繰り返し設定し、目標走行経路に沿って車両が走行するように、車両を制御するように構成されたコントローラと、を備え、コントローラは、物体検出装置による更新後の物体の位置と、更新前の当該物体の位置に基づき設定されている目標走行経路との距離が、更新前の当該物体の位置と当該設定されている目標走行経路との距離よりも大きい場合、当該設定されている目標走行経路よりも当該物体に近い領域に、次の目標走行経路が設定され難くするように構成されている。
【0008】
このように構成された本発明によれば、コントローラは、物体検出装置による更新後の物体の位置と、更新前の当該物体の位置に基づき設定されている目標走行経路との距離が、更新前の当該物体の位置と当該設定されている目標走行経路との距離よりも大きい場合、当該設定されている目標走行経路よりも当該物体に近い領域に、次の目標走行経路が設定され難くするので、設定されている目標走行経路から離れる方向に物体の位置が更新された場合に、更新後の物体の位置に近づくような目標走行経路が設定されることを抑制できる。これにより、目標走行経路の変化に伴う車両挙動の頻繁な変化を抑制することができ、車両と障害物との安全な距離を確保しつつ、乗員に煩わしさを感じさせることを防止できる。
【0009】
他の観点では、本発明は、車両制御装置であって、車両の走行路に関する走行路情報を取得する走行路情報取得装置と、車両の前方の物体の位置を検出し、当該位置を繰り返し更新する物体検出装置と、走行路情報及び物体の位置に基づき走行路における目標走行経路を繰り返し設定し、目標走行経路に沿って車両が走行するように、車両を制御するように構成されたコントローラと、を備え、コントローラは、物体検出装置による更新後の物体の位置と、更新前の当該物体の位置に基づき設定されている目標走行経路との距離が、更新前の当該物体の位置と当該設定されている目標走行経路との距離よりも大きい場合、当該設定されている目標走行経路よりも当該物体に近い領域を、次の目標走行経路が設定される領域から除外するように構成されている。
【0010】
このように構成された本発明によれば、コントローラは、物体検出装置による更新後の物体の位置と、更新前の当該物体の位置に基づき設定されている目標走行経路との距離が、更新前の当該物体の位置と当該設定されている目標走行経路との距離よりも大きい場合、当該設定されている目標走行経路よりも当該物体に近い領域を、次の目標走行経路が設定される領域から除外するので、設定されている目標走行経路から離れる方向に物体の位置が更新された場合には、更新後の物体の位置に近づくような目標走行経路が設定されない。これにより、目標走行経路の変化に伴う車両挙動の頻繁な変化を防止することができ、車両と障害物との安全な距離を確保しつつ、乗員に煩わしさを感じさせることを防止できる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
マツダ株式会社
ピストン
26日前
マツダ株式会社
車両の前部構造
26日前
マツダ株式会社
腐食検査用測定装置
4日前
マツダ株式会社
腐食検査用測定装置
4日前
マツダ株式会社
運転者状態判定装置
19日前
マツダ株式会社
運転者状態判定装置
25日前
マツダ株式会社
ピストンの製造方法
26日前
マツダ株式会社
車両用シートの載置構造
17日前
マツダ株式会社
運転者異常予兆検出装置
19日前
マツダ株式会社
スイッチングモジュールおよびインバータ
19日前
矢崎総業株式会社
CPA付コネクタ及びワイヤーハーネス
3日前
マツダ株式会社
車両用乗降補助装置
9日前
トヨタ自動車株式会社
情報処理システム
18日前
個人
スーパーEV
1か月前
個人
揺動照射照明装置
3か月前
個人
骨組み型熱交換器
3日前
株式会社コーワ
清掃装置
3か月前
個人
自動車暴走抑制装置
10日前
日本精機株式会社
表示装置
3か月前
日本精機株式会社
表示装置
3か月前
日本精機株式会社
表示装置
2か月前
東レ株式会社
フロントグリル
10日前
個人
ワイパーアームリフト装置
3か月前
個人
断熱構造体とその製造方法
2か月前
井関農機株式会社
作業車両
26日前
株式会社SUBARU
車両
20日前
株式会社SUBARU
車両
20日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
3か月前
日本精機株式会社
車両用表示装置
2か月前
株式会社SUBARU
車両
20日前
オクト産業株式会社
自動車
1か月前
井関農機株式会社
作業車両
26日前
株式会社SUBARU
車両
2か月前
株式会社SUBARU
車両
2か月前
トヨタ自動車株式会社
車両
2か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ