TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025173956
公報種別
公開特許公報(A)
公開日
2025-11-28
出願番号
2024079859
出願日
2024-05-16
発明の名称
車両制御装置
出願人
三菱電機株式会社
代理人
弁理士法人ぱるも特許事務所
主分類
B60W
30/095 20120101AFI20251120BHJP(車両一般)
要約
【課題】障害物の動作に対する自車両の過剰な動作を防止できる車両制御装置を提供する。
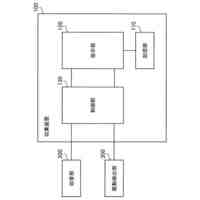
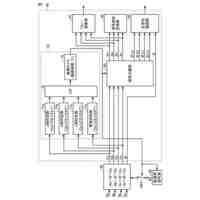
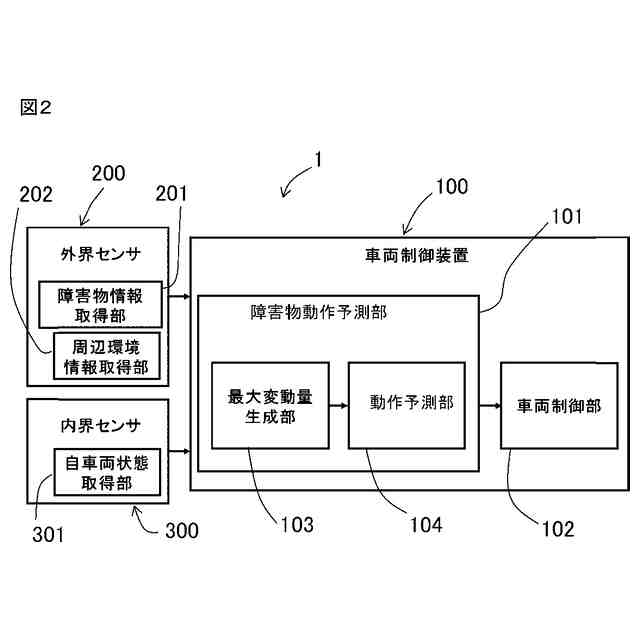
【解決手段】最大変動量生成部(103)により、現在から未来までの障害物の動作における状態量の最大変動量を生成し、動作予測部(104)により、あらかじめ定められた運動モデルに基づいて障害物の未来までの動作を予測し、車両制御部(102)により、動作予測部(104)により予測された障害物の動作に基づいて、自車両の運動を制御する車両制御装置であって、動作予測部(104)は、未来までの障害物の動作における状態量の変動量が上記最大変動量を超えないように変動量を制限して障害物の位置を予測するように構成されている。
【選択図】図2
特許請求の範囲
【請求項1】
自車両に搭載され、当該自車両の周辺に存在する障害物に対して距離を保ちながら、前記自車両の運動を制御する車両制御装置であって、
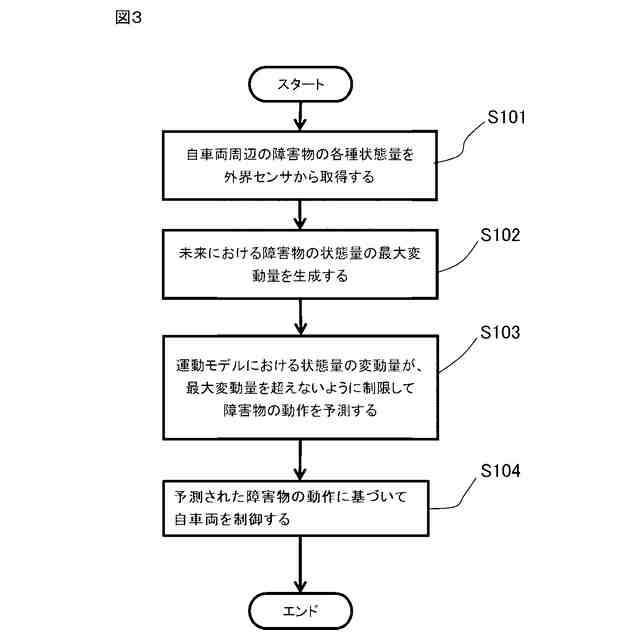
現在からあらかじめ定められた時間後の未来までの前記障害物の動作における、あらかじめ定められた状態量の最大変動量を生成する最大変動量生成部と、
あらかじめ定められた運動モデルに基づいて、前記障害物の前記未来までの動作を予測する動作予測部と、
前記動作予測部により予測された前記障害物の動作に基づいて、前記自車両の運動を制御する車両制御部と、
を備え、
前記動作予測部は、
前記未来までの前記障害物の動作における前記状態量の変動量が前記最大変動量を超えないように前記変動量を制限して、前記予測を行なうように構成されている、
ことを特徴とする車両制御装置。
続きを表示(約 1,700 文字)
【請求項2】
自車両に搭載され、当該自車両の周辺に存在する障害物に対して距離を保ちながら、前記自車両の運動を制御する車両制御装置であって、
前記自車両に搭載されたセンサにより取得した前記障害物に関する情報に基づいて、現在の前記障害物の動作が一時的な動作であるか否かを判定する判定部と、
前記現在からあらかじめ定められた時間後の未来までの前記障害物の動作における、あらかじめ定められた状態量の最大変動量を生成する最大変動量生成部と、
あらかじめ定められた運動モデルに基づいて、前記障害物の前記未来までの動作を予測する動作予測部と、
前記動作予測部により予測された前記障害物の動作に基づいて、前記自車両の運動を制御する車両制御部と、
を備え、
前記動作予測部は、
前記判定部が、前記障害物の動作が前記一時的な動作であると判定したときは、前記未来までの前記障害物の動作における前記状態量の変動量が前記最大変動量を超えないように前記変動量を制限して、前記予測を行ない、
前記判定部が、前記障害物の動作が前記一時的な動作ではないと判定したときは、前記制限を行なうことなく前記予測を行なう、
ように構成されている、
ことを特徴とする車両制御装置。
【請求項3】
前記判定部は、
前記障害物の状態量の変動量があらかじめ定められた閾値以上のときは、前記障害物の動作が前記一時的な動作であると判定する、
ように構成されている、
ことを特徴とする請求項2に記載の車両制御装置。
【請求項4】
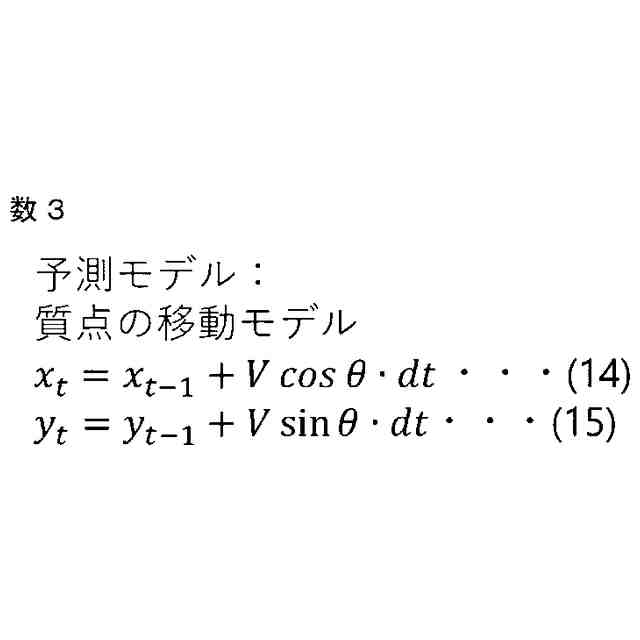
前記障害物の状態量は、前記自車両の進行方向である縦方向の前記障害物の速度であり、
前記最大変動量生成部が生成する前記最大変動量は、前記縦方向の前記障害物の速度の最大変動量であり、
前記運動モデルは、等速度直線運動モデルである、
ことを特徴とする請求項1から3のうちの何れか一項に記載の車両制御装置。
【請求項5】
前記最大変動量生成部は、前記自車両が走行しているエリアに応じて前記最大変動量を変化させるように構成されている、
ことを特徴とする請求項4に記載の車両制御装置。
【請求項6】
前記障害物の状態量は、前記自車両の進行方向である縦方向の前記障害物の加速度であり、
前記最大変動量生成部が生成する前記最大変動量は、前記縦方向の前記障害物の加速度の最大変動量であり、
前記運動モデルは、等加速度直線運動モデルである、
ことを特徴とする請求項1から3のうちの何れか一項に記載の車両制御装置。
【請求項7】
前記最大変動量生成部は、前記自車両が走行しているエリアに応じて前記最大変動量を変化させるように構成されている、
ことを特徴とする請求項6に記載の車両制御装置。
【請求項8】
前記障害物の状態量は、前記自車両の進行方向に対して直交する方向である横方向の前記障害物の速度であり、
前記最大変動量生成部が生成する前記最大変動量は、前記横方向の前記障害物の速度の最大変動量であり、
前記運動モデルは、等速度直線運動モデルである、
ことを特徴とする請求項1から3のうちの何れか一項に記載の車両制御装置。
【請求項9】
前記最大変動量生成部は、前記自車両が走行しているエリアに応じて前記最大変動量を変化させるように構成されている、
ことを特徴とする請求項8に記載の車両制御装置。
【請求項10】
前記障害物の状態量は、前記自車両の進行方向に対して直交する方向である横方向の前記障害物の位置であり、
前記最大変動量生成部が生成する前記最大変動量は、前記横方向の前記障害物の位置の最大変動量であり、
前記運動モデルは、等加速度直線運動モデルである、
ことを特徴とする請求項1から3のうちの何れか一項に記載の車両制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両制御装置に関するものである。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
従来、車両の自動運転装置、ADAS(Advanced Driver Assistance Systems:先進運転支援システム)、などにおいて、現時点からあらかじめ定められた予測時間後までの自車両の将来軌道(時間と経路を含む)を演算し、当該将来軌道に基づいて自車両が走行するように、自車両の挙動を制御するようにした車両制御装置が知られている。
【0003】
前述の車両制御装置によれば、たとえば、自車両の進行方向の前方に交差点の停止線が存在することが予想される場合、自車両が追従走行している先行の他車両の停止動作を予測し、当該予測した他車両の停止動作に合わせて自車両の将来軌道を計画して自車両の走行を制御するが、先行の他車両が等速度運動を行なうと仮定して自車両の将来軌道の計画を行うと、先行の他車両が等速度運動から減速運動に転じたとき、当該他車両と自車両との間の車間距離の急激な縮小が発生し、自車両の運転員に危機感を与えることがある。
【0004】
前述の車両制御装置を改良する装置として、特許文献1には、先行の他車両が減速運動をすると仮定した上で、自車両が先行の他車両に衝突するまでに要する衝突時間が閾値以下となる自車両の加速度制限値を計算し、当該計算した加速度制限値により自車両の加速度を制限することで、先行の他車両との車間距離を制御するようにした車間距離制御装置が開示されている。
【0005】
特許文献1に開示された従来の車間距離制御装置は、加速度制限値の計算時に、加速度制限値の計算開始時点から先行の他車両が一定減速度で減速して停車すると仮定し、かつ、自車両が様々な加速度により走行すると仮定し、自車両の様々な加速度目標値に対して先行の他車両へ衝突するまでの時間の点を繋いだ時間関数を求め、当該時間関数と前述の衝突時間の閾値との交点を、自車両の加速度制限値とするように構成されている。
【0006】
特許文献1に開示された従来の車間距離制御装置によれば、加速度制限値を計算するとき、計算開始時点から先行車が一定の減速度で減速して停車すると仮定するため、先行車が発進から減速して停止するとき、自車両の加速度が先行の他車両の減速に追従するように緩やか勾配にて低下することで、自車両の運転員に与える危機感を低減することができ、さらに、加速度制限値を計算するとき、自車が様々な加速度により走行すると仮定して時間関数を求めるため、より少ない計算量で衝突時間が閾値以下となる最大の加速度である加速度制限値を計算することができる。
【先行技術文献】
【特許文献】
【0007】
特許第6702104号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
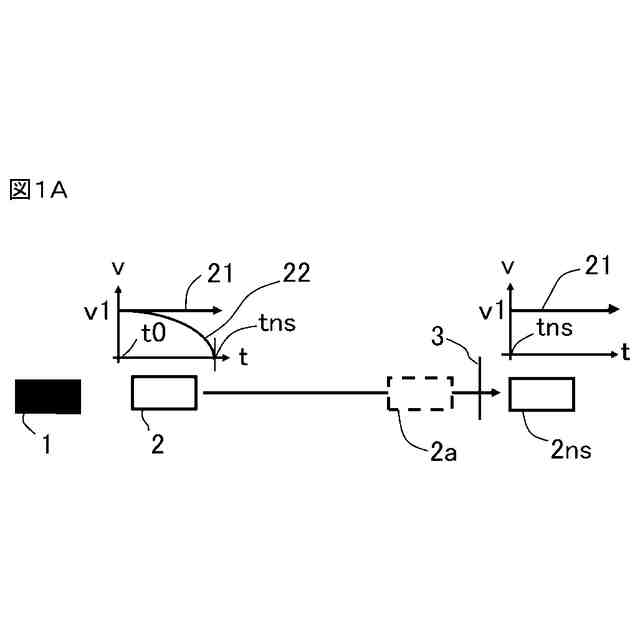
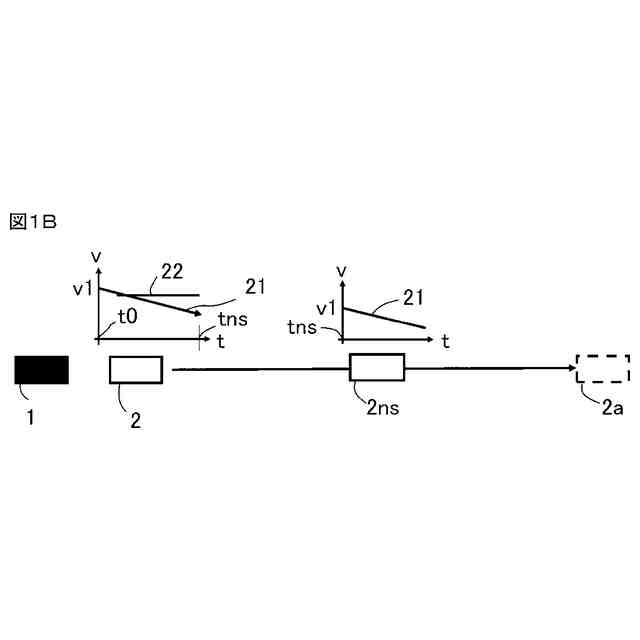
特許文献1に開示された従来の車間距離制御装置によれば、先行の他車両が一定の加減速度により加減速すると仮定して、先行の他車両の移動予測を行なうようにしているので、高速道路上などのシーンにおいて、実際の先行の他車両の加減速が一時的であったとき、先行の他車両の予測軌道が実際の軌道と大きく乖離することになる。したがって、たとえば高速道路で先行の他車両が短時間だけ強く減速するシーンでは、自車両では先行の他車両が強めの減速を継続すると誤予測してしまい、自車両の軌道予測は減速過剰となる課題があった。
【0009】
本開示は、上記のような課題を解決するための技術を開示するものであり、他車両などの障害物の動作に対する自車両の過剰な動作を防止できる車両制御装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
本開示の車両制御装置は、
自車両に搭載され、当該自車両の周辺に存在する障害物に対して距離を保ちながら、前記自車両の運動を制御する車両制御装置であって、
現在からあらかじめ定められた時間後の未来までの前記障害物の動作における、あらかじめ定められた状態量の最大変動量を生成する最大変動量生成部と、
あらかじめ定められた運動モデルに基づいて、前記障害物の前記未来までの動作を予測する動作予測部と、
前記動作予測部により予測された前記障害物の動作に基づいて、前記自車両の運動を制御する車両制御部と、
を備え、
前記動作予測部は、
前記未来までの前記障害物の動作における前記状態量の変動量が前記最大変動量を超えないように前記変動量を制限して、前記予測を行なうように構成されている、
ことを特徴とする。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
三菱電機株式会社
冷蔵庫
8日前
三菱電機株式会社
換気扇
1か月前
三菱電機株式会社
冷蔵庫
1か月前
三菱電機株式会社
増幅器
1か月前
三菱電機株式会社
扇風機
29日前
三菱電機株式会社
換気扇
1日前
三菱電機株式会社
換気扇
1か月前
三菱電機株式会社
換気扇
1か月前
三菱電機株式会社
換気装置
今日
三菱電機株式会社
照明器具
2日前
三菱電機株式会社
照明装置
22日前
三菱電機株式会社
収集装置
1か月前
三菱電機株式会社
電気機器
8日前
三菱電機株式会社
電子機器
1か月前
三菱電機株式会社
空気調和機
1か月前
三菱電機株式会社
半導体装置
8日前
三菱電機株式会社
半導体装置
1か月前
三菱電機株式会社
加熱調理器
16日前
三菱電機株式会社
回路遮断器
16日前
三菱電機株式会社
電動送風機
今日
三菱電機株式会社
半導体装置
1か月前
三菱電機株式会社
保護リレー
1か月前
三菱電機株式会社
調理システム
1か月前
三菱電機株式会社
空調システム
24日前
三菱電機株式会社
点検管理装置
29日前
三菱電機株式会社
制御システム
22日前
三菱電機株式会社
貯湯式給湯機
1か月前
三菱電機株式会社
空調システム
1か月前
三菱電機株式会社
貯湯式給湯機
1か月前
三菱電機株式会社
ねじ締め装置
1か月前
三菱電機株式会社
空気清浄装置
16日前
三菱電機株式会社
照明システム
1か月前
三菱電機株式会社
位置算出装置
1日前
三菱電機株式会社
光源デバイス
22日前
三菱電機株式会社
炊飯システム
1か月前
三菱電機株式会社
車両制御装置
今日
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ