TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025173078
公報種別
公開特許公報(A)
公開日
2025-11-27
出願番号
2024078434
出願日
2024-05-14
発明の名称
位置算出装置
出願人
三菱電機株式会社
代理人
弁理士法人ぱるも特許事務所
主分類
G01C
21/30 20060101AFI20251119BHJP(測定;試験)
要約
【課題】周辺の物体の検出およびGNSSの信号受信が困難となる場面を含んで、移動体の位置を精度よく確率分布として表すことのできる位置算出装置を得る。
【解決手段】衛星からの信号を受信して求めた衛星測位位置と、周囲の環境を把握して地図情報を参照して求めた地図参照位置と、それぞれのばらつき度合いに基づいて生成した確率分布を合成した確率分布を求め、自立航法によって求めた自立航法位置とばらつき度合いに基づいて生成した確率分布と合成することで現在位置をもとめることができ、自立航法位置の補正もできる。これによって、周辺の物体の検出が困難となる場合、GNSSの信号受信が困難となる場合、および、その両者とも困難となる場合のいずれであっても、精度の高い現在位置の算出が可能となり、確率分布として表すことが可能となる。
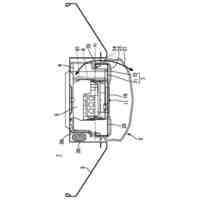
【選択図】図1
特許請求の範囲
【請求項1】
移動体に搭載された受信器によって衛星からの信号を受信して算出した前記移動体の位置である衛星測位位置と前記衛星測位位置が算出される際の第一のばらつき度合いを求める衛星測位部、
前記移動体に搭載された外観把握センサによって把握された周囲の環境から地図情報を参照して算出した前記移動体の位置である地図参照位置と前記地図参照位置が算出される際の第二のばらつき度合いを求める地図参照位置算出部、
前記移動体に搭載された前記移動体の移動状態を検出する移動状態検出センサの出力から導かれた前記移動体の進行速度と進行方向に基づいて算出した前記移動体の位置である自立航法位置と前記自立航法位置が算出される際の第三のばらつき度合いを求める自立航法部、および、
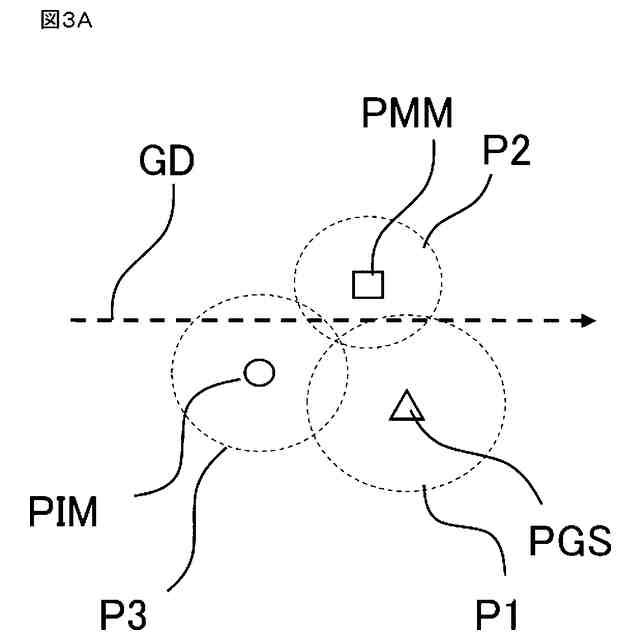
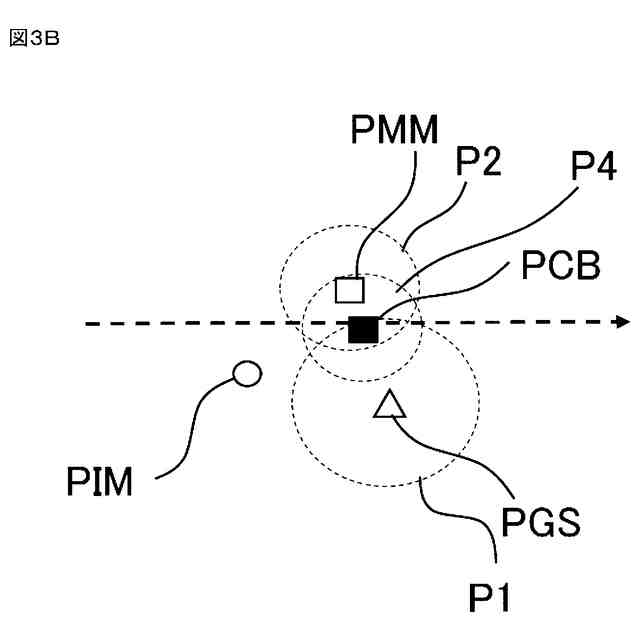
前記第一のばらつき度合いと前記衛星測位位置に基づいて位置座標空間における前記衛星測位位置の確率分布である第一の確率分布を生成し、前記第二のばらつき度合いと前記地図参照位置に基づいて位置座標空間における前記地図参照位置の確率分布である第二の確率分布を生成し、前記第三のばらつき度合いと前記自立航法位置に基づいて位置座標空間における前記自立航法位置の確率分布である第三の確率分布を生成し、前記第一の確率分布と前記第二の確率分布を合成して第四の確率分布を生成し、前記第四の確率分布と前記第三の確率分布を合成して第五の確率分布を生成し、前記第五の確率分布から求めた移動体の位置である補正後移動体位置によって、前記自立航法位置を補正する補正算出部を備えた位置算出装置。
続きを表示(約 1,800 文字)
【請求項2】
前記補正算出部は、前記第五の確率分布から求めた平均値、中央値、または最頻値のいずれかを前記補正後移動体位置とする請求項1に記載の位置算出装置。
【請求項3】
前記補正算出部は、前記衛星測位部または前記地図参照位置算出部の一方によって前記移動体の最新の位置が算出された第一の時刻に、他方によって前記移動体の位置が前回算出された第二の時刻から前記第一の時刻の間の前記移動体の移動量である最新化移動量を前記自立航法部によって算出された前記移動体の前記第二の時刻と前記第一の時刻の位置に基づいて求め、他方によって前回算出された前記第二の時刻の前記移動体の位置に前記最新化移動量を加えて他方によって算出された最新の前記移動体の位置として他方の確率分布を生成し、前記第一の確率分布と前記第二の確率分布を合成して第四の確率分布を生成する請求項1に記載の位置算出装置。
【請求項4】
前記補正算出部は、前記第一の確率分布と前記第二の確率分布を合成して第四の確率分布を生成する際に、前記自立航法位置と前記衛星測位位置の間の距離が予め定められた第一の距離閾値よりも大きい場合は前記第一のばらつき度合いを増大させて前記第一の確率分布を生成し、前記自立航法位置と前記地図参照位置の間の距離が予め定められた第二の距離閾値よりも大きい場合は前記第二のばらつき度合いを増大させて前記第二の確率分布を生成する請求項1から3のいずれか一項に記載の位置算出装置。
【請求項5】
前記補正算出部は、前記第一の確率分布と前記第二の確率分布を合成して第四の確率分布を生成する際に、前記衛星測位位置と前記地図参照位置の間の距離が予め定められた最大距離閾値よりも大きい場合は、前記自立航法位置と前記衛星測位位置の間の距離である衛星測位距離偏差と前記自立航法位置と前記地図参照位置の間の距離である地図参照位置距離偏差とを比較し、前記衛星測位距離偏差の方が前記地図参照位置距離偏差よりも大きい場合は前記第一のばらつき度合いを増大させて前記第一の確率分布を生成し、前記地図参照位置距離偏差が前記衛星測位距離偏差以下の場合は前記第二のばらつき度合いを増大させて前記第二の確率分布を生成する請求項1から3のいずれか一項に記載の位置算出装置。
【請求項6】
前記補正算出部は、前記第一の確率分布と前記第二の確率分布を合成して第四の確率分布を生成する際に、前記第一のばらつき度合いと前記第二のばらつき度合いがともに予め定められたばらつき度合い閾値よりも小さい場合であって、前記衛星測位位置と前記地図参照位置の間の距離が予め定められた最小距離閾値よりも小さい場合は、前記第一のばらつき度合いを減少させて前記第一の確率分布を生成し、前記第二のばらつき度合いを減少させて前記第二の確率分布を生成する請求項1から3のいずれか一項に記載の位置算出装置。
【請求項7】
前記補正算出部は、前記ばらつき度合い閾値が前記第一のばらつき度合いと前記第二のばらつき度合いの大きさに基づいて設定される請求項6に記載の位置算出装置。
【請求項8】
前記補正算出部は、前記衛星測位部によって求められた信号受信可能な前記衛星の位置または前記地図参照位置算出部によって前記地図情報から求められた天空率に基づいて、前記第一のばらつき度合いを増大させて前記第一の確率分布を生成する請求項1から3のいずれか一項に記載の位置算出装置。
【請求項9】
前記補正算出部は、前記衛星測位部の信号受信可能な前記衛星の数が前記移動体の前後方向よりも左右方向のほうが少ない場合、または前記地図参照位置算出部によって前記地図情報から求められた天空率が前記移動体の前後方向よりも左右方向のほうが少ない場合に、前記第一のばらつき度合いを前記移動体の左右方向に増大させて前記第一の確率分布を生成する請求項1から3のいずれか一項に記載の位置算出装置。
【請求項10】
前記補正算出部は、前記地図参照位置算出部の前記地図情報から前記移動体が前記第一のばらつき度合いまたは前記第二のばらつき度合いが増大する領域に進行していると判断された場合は、予めそのばらつき度合いを増大させて前記第一の確率分布または前記第二の確率分布を生成する請求項1から3のいずれか一項に記載の位置算出装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本願は、位置算出装置に関するものである。
続きを表示(約 3,200 文字)
【背景技術】
【0002】
従来から、移動体に搭載された位置算出装置の情報を用いて、移動体の位置を算出する技術が知られている。移動体は、自動車、航空機、船舶、移動台車、ロボット等の制御機能を有する移動可能な物体である。また移動体には、外部の物体を識別して相対的な位置を把握し、地図情報と照合して現在位置を算出するため、または移動体の位置を独立して求めるためのセンサが設けられている。外部の物体を識別するためには、可視光カメラ、レーダ等の外部の物体の情報を計測する装置、地図情報から移動体の外部の物体の情報を取得する装置、衛星の信号から移動体の位置を算出する装置等が存在する。
【0003】
移動体が屋内を移動する場合と、屋外を移動する場合とで環境条件が変化する。このように移動体が置かれた環境条件が変化した場合であっても、正確な位置算出をすることができる位置算出装置についての技術が開示されている(例えば特許文献1)。
【先行技術文献】
【特許文献】
【0004】
特許第6962007号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に開示されている技術では、移動体として自律走行台車について説明されている。特許文献1の技術では、周辺障害物の相対位置と地図情報とを照合し、確率分布として位置を算出する。また、GNSS(Global Navigation Satellite System)からの測位情報によって確率分布として位置を算出する。これらの確率分布を合成することで最終的な自己位置を推定することができる。自車の置かれた状況に応じて、合成係数を変更することで、屋内及び屋外でシームレスに自己位置を推定することができ、自律走行が可能になる。
【0006】
特許文献1に記載の技術では、自律台車の周囲に参照できる物体が存在する屋内では、周囲の物体を検出しながら自車位置を推測し、周囲に参照できる物体が存在しないグラウンドのような開けた場所ではGNSSによって自車位置を推測できる。しかしながら、トンネル内、荒天時の雪原など、周辺の物体の検出およびGNSSの信号受信が困難となる場面では、自車位置の推測が困難となる。
【0007】
本開示は、このような課題を解決するものであり、周辺の物体の検出およびGNSSの信号受信が困難となる場面を含んで、移動体の位置を精度よく確率分布として表すことのできる位置算出装置を得ることを目的とする。
【課題を解決するための手段】
【0008】
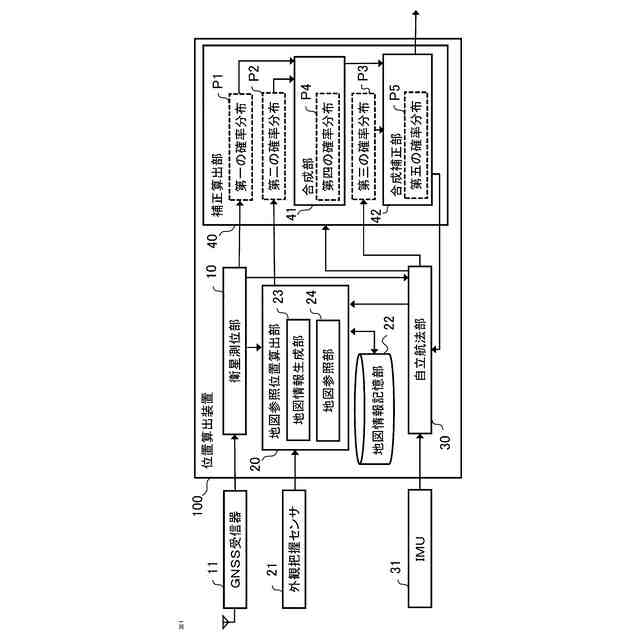
本開示に係る位置算出装置は、
移動体に搭載された受信器によって衛星からの信号を受信して算出した移動体の位置である衛星測位位置と衛星測位位置が算出される際の第一のばらつき度合いを求める衛星測位部、
移動体に搭載された外観把握センサによって把握された周囲の環境から地図情報を参照して算出した移動体の位置である地図参照位置と地図参照位置が算出される際の第二のばらつき度合いを求める地図参照位置算出部、
移動体に搭載された移動体の移動状態を検出する移動状態検出センサの出力から導かれた移動体の進行速度と進行方向に基づいて算出した移動体の位置である自立航法位置と自立航法位置が算出される際の第三のばらつき度合いを求める自立航法部、および、
第一のばらつき度合いと衛星測位位置に基づいて位置座標空間における衛星測位位置の確率分布である第一の確率分布を生成し、第二のばらつき度合いと地図参照位置に基づいて位置座標空間における地図参照位置の確率分布である第二の確率分布を生成し、第三のばらつき度合いと自立航法位置に基づいて位置座標空間における自立航法位置の確率分布である第三の確率分布を生成し、第一の確率分布と第二の確率分布を合成して第四の確率分布を生成し、第四の確率分布と第三の確率分布を合成して第五の確率分布を生成し、第五の確率分布から求めた移動体の位置である補正後移動体位置によって、自立航法位置を補正する補正算出部を備えたものである。
【発明の効果】
【0009】
本開示に係る位置算出装置によれば、周辺の物体の検出およびGNSSの信号受信が困難となる場面を含んで、移動体の位置を精度よく確率分布として表すことができる。衛星からの信号を受信して求めた衛星測位位置を第一の確率分布として求め、周囲の環境を把握し地図情報を参照して求めた地図参照位置を第二の確率分布として求め、それらを合成した第三の確率分布を求め、自立航法によって求めた自立航法位置を第三の確率分布として求め、第四の確率分布と第三の確率分布を合成した確率分布によって現在位置を表すことができる。これによって、周辺の物体の検出が困難となる場合、GNSSの信号受信が困難となる場合、および、その両者とも困難となる場合のいずれであっても、精度の高い現在位置の算出が可能となり、確率分布として表すことが可能となる。
【図面の簡単な説明】
【0010】
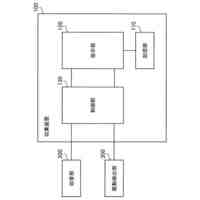
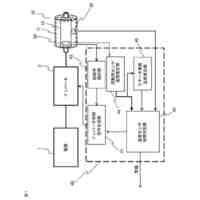
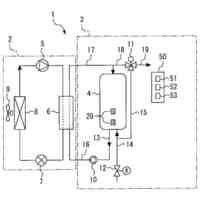
実施の形態1に係る位置算出装置の構成図である。
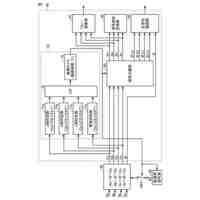
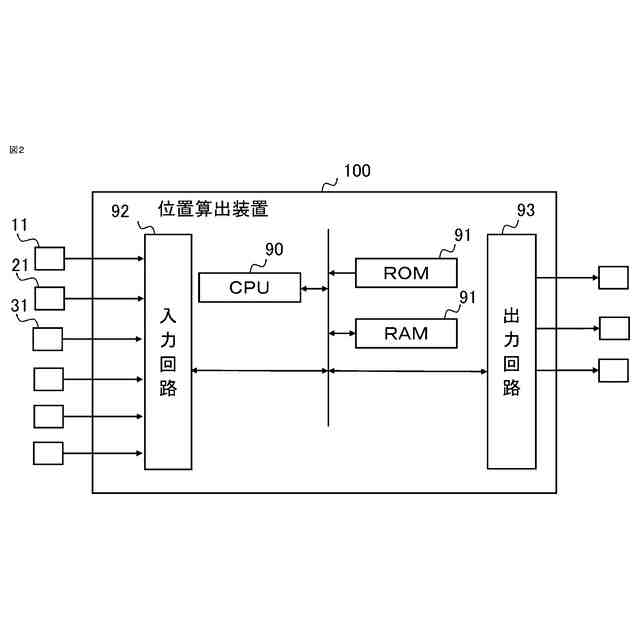
実施の形態1に係る位置算出装置のハードウェア構成図である。
実施の形態1に係る位置算出装置の位置算出の手順を示す第一の図である。
実施の形態1に係る位置算出装置の位置算出の手順を示す第二の図である。
実施の形態1に係る位置算出装置の位置算出の手順を示す第三の図である。
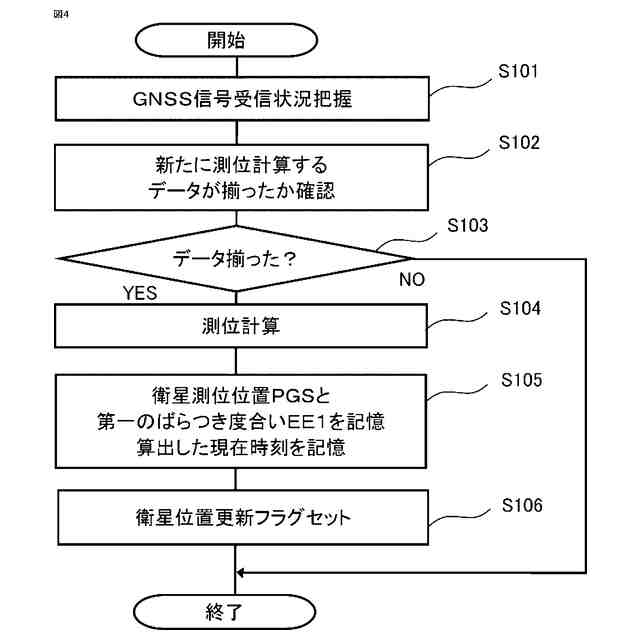
実施の形態1に係る位置算出装置の衛星測位部の処理を示すフローチャートである。
実施の形態1に係る位置算出装置の地図参照位置算出部の処理を示すフローチャートである。
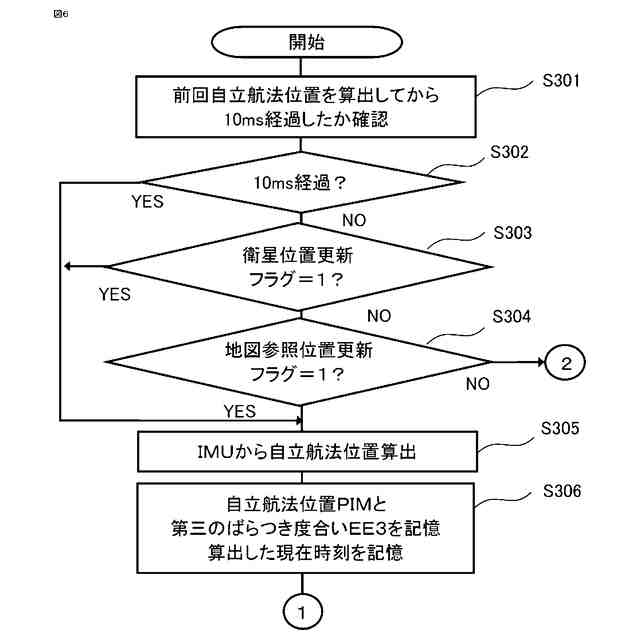
実施の形態1に係る位置算出装置の自立航法部と補正算出部の処理を示す第一のフローチャートである。
実施の形態1に係る位置算出装置の自立航法部と補正算出部の処理を示す第二のフローチャートである。
実施の形態1に係る位置算出装置の自立航法部と補正算出部の処理を示す第三のフローチャートである。
実施の形態1に係る位置算出装置の自立航法部と補正算出部の処理を示す第四のフローチャートである。
実施の形態1に係る位置算出装置の自立航法部と補正算出部の処理を示す第五のフローチャートである。
実施の形態1に係る位置算出装置のばらつき度合いを増大させる場合の説明図である。
実施の形態2に係る位置算出装置のばらつき度合いを増大させる場合の説明図である。
実施の形態2に係る位置算出装置のばらつき度合いを増大させる処理のフローチャートである。
実施の形態3に係る位置算出装置のばらつき度合いを減少させる場合の説明図である。
実施の形態3に係る位置算出装置のばらつき度合いを減少させる処理のフローチャートである。
実施の形態4に係る位置算出装置の第一のばらつき度合いを増大させる場合の説明図である。
実施の形態4に係る位置算出装置の第一のばらつき度合いを増大させる処理のフローチャートである。
実施の形態4に係る位置算出装置の第一のばらつき度合いを左右方向に増大させる処理のフローチャートである。
実施の形態5に係る位置算出装置のばらつき度合いを増大させる処理のフローチャートである。
実施の形態6に係る位置算出装置の第一のばらつき度合いを増大させる場合の説明図である。
実施の形態6に係る位置算出装置の第一のばらつき度合いを増大させる処理のフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
三菱電機株式会社
換気扇
今日
三菱電機株式会社
冷蔵庫
7日前
三菱電機株式会社
換気扇
1か月前
三菱電機株式会社
扇風機
28日前
三菱電機株式会社
換気扇
1か月前
三菱電機株式会社
増幅器
1か月前
三菱電機株式会社
換気扇
1か月前
三菱電機株式会社
冷蔵庫
1か月前
三菱電機株式会社
回転電機
2か月前
三菱電機株式会社
照明装置
21日前
三菱電機株式会社
照明装置
2か月前
三菱電機株式会社
電子機器
1か月前
三菱電機株式会社
電気機器
7日前
三菱電機株式会社
収集装置
1か月前
三菱電機株式会社
回転電機
1か月前
三菱電機株式会社
照明器具
1日前
三菱電機株式会社
半導体装置
1か月前
三菱電機株式会社
保護リレー
29日前
三菱電機株式会社
加熱調理器
2か月前
三菱電機株式会社
半導体装置
2か月前
三菱電機株式会社
半導体装置
29日前
三菱電機株式会社
半導体装置
7日前
三菱電機株式会社
半導体装置
2か月前
三菱電機株式会社
空気調和機
1か月前
三菱電機株式会社
加熱調理器
15日前
三菱電機株式会社
回路遮断器
15日前
三菱電機株式会社
貯湯式給湯機
1か月前
三菱電機株式会社
ねじ締め装置
1か月前
三菱電機株式会社
制御システム
21日前
三菱電機株式会社
光源デバイス
21日前
三菱電機株式会社
空調システム
23日前
三菱電機株式会社
空気清浄装置
15日前
三菱電機株式会社
貯湯式給湯機
1か月前
三菱電機株式会社
貯湯式給湯機
21日前
三菱電機株式会社
照明システム
1か月前
三菱電機株式会社
点検管理装置
28日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ