TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025170831
公報種別
公開特許公報(A)
公開日
2025-11-20
出願番号
2024075602
出願日
2024-05-08
発明の名称
障害物行動予測装置、移動体制御装置、障害物行動予測方法、及び移動体制御方法
出願人
三菱電機株式会社
代理人
弁理士法人ぱるも特許事務所
主分類
G08G
1/16 20060101AFI20251113BHJP(信号)
要約
【課題】交差点のような複数の道路で構成されるエリアに存在する動的障害物に対して、簡便な方法で障害物の行動を予測可能な障害物行動予測装置を提供することを目的とする。
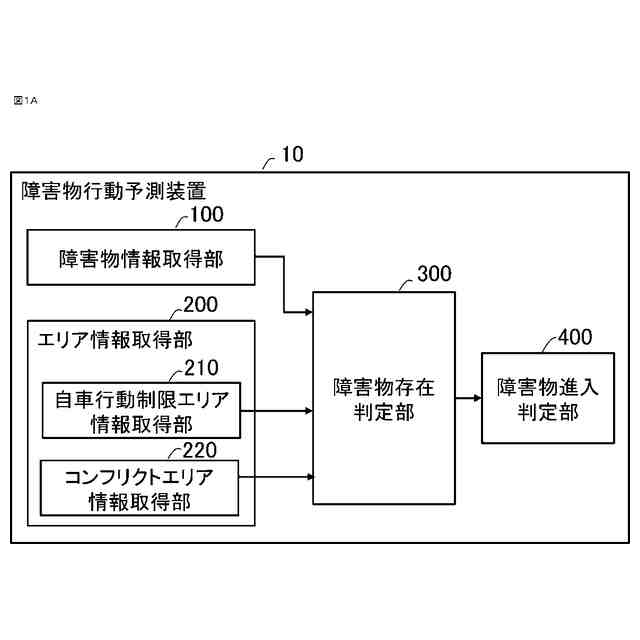
【解決手段】移動体が障害物の通過を妨げないように、障害物の行動を予測する障害物行動予測装置であって、移動体の周辺の障害物の情報を取得する障害物情報取得部と、移動体の経路と障害物の経路とが交差する領域を含み、障害物を監視するための自車行動制限エリアを取得するエリア情報取得部と、取得された障害物情報及び自車行動制限エリアに基づいて、障害物が自車行動制限エリアに存在するかを判定する障害物存在判定部と、障害物存在判定部の判定結果に基づいて、障害物が移動体の経路と障害物の経路とが交差する領域に進入するかを判定する障害物進入判定部と、を備えた。
【選択図】図1A
特許請求の範囲
【請求項1】
移動体が障害物の通過を妨げないように、前記障害物の行動を予測する障害物行動予測装置であって、
前記移動体の周辺の前記障害物の情報であって少なくとも前記障害物の位置情報を含む障害物情報を取得する障害物情報取得部と、
前記移動体の経路と前記障害物の経路とが交差する領域を含み、前記障害物を監視するための自車行動制限エリアを取得するエリア情報取得部と、
前記障害物情報取得部で取得された前記障害物情報と、前記エリア情報取得部で取得された前記自車行動制限エリアに基づいて、前記障害物が前記自車行動制限エリアに存在するかを判定する障害物存在判定部と、
前記障害物存在判定部の判定結果に基づいて、前記障害物が前記移動体の経路と前記障害物の経路とが交差する領域に進入するかを判定する障害物進入判定部と、を備えた障害物行動予測装置。
続きを表示(約 2,700 文字)
【請求項2】
前記エリア情報取得部は、
前記自車行動制限エリアの内部で前記移動体の経路と前記障害物の経路とが交差する領域をコンフリクトエリアとして取得するコンフリクトエリア情報取得部と、
前記コンフリクトエリア以外の領域を取得する自車行動制限エリア情報取得部と、を有し、
前記自車行動制限エリア情報取得部は、さらに第1の自車行動制限エリアの情報を取得する第1の自車行動制限エリア情報取得部と、前記第1の自車行動制限エリアよりも走行が優先される第2の自車行動制限エリアの情報を取得する第2の自車行動制限エリア情報取得部と、を有し、
前記障害物存在判定部により前記障害物が前記第2の自車行動制限エリア内に存在すると判定された場合、
前記障害物進入判定部は前記障害物が前記コンフリクトエリアに進入する可能性が高いと判定する、請求項1に記載の障害物行動予測装置。
【請求項3】
前記自車行動制限エリア情報取得部は、
前記自車行動制限エリアに停止線が設けられている場合、前記第1の自車行動制限エリアとして前記第1の自車行動制限エリア情報取得部で情報を取得する、請求項2に記載の障害物行動予測装置。
【請求項4】
前記自車行動制限エリア情報取得部は、
全ての前記自車行動制限エリアに停止線が設けられていない場合、前記移動体の存在する前記自車行動制限エリアを前記第1の自車行動制限エリアとして前記第1の自車行動制限エリア情報取得部で情報を取得し、前記移動体の存在しない前記自車行動制限エリアを前記第2の自車行動制限エリアとして前記第2の自車行動制限エリア情報取得部で情報を取得する、請求項3に記載の障害物行動予測装置。
【請求項5】
さらに、交通規則取得部を備え、
前記交通規則取得部は、少なくとも前記移動体の経路と前記障害物の経路とが交差する領域の周辺の優先道路の情報及び非優先道路の情報を取得し、
前記エリア情報取得部は、前記交通規則取得部より取得された情報に基づいて、
前記非優先道路上の前記自車行動制限エリアを第1の自車行動制限エリアとして、第1の自車行動制限エリア情報取得部で情報を取得し、
前記優先道路上の前記自車行動制限エリアを第2の自車行動制限エリアとして、第2の自車行動制限エリア情報取得部で情報を取得し、
前記自車行動制限エリアの内部で前記移動体の経路と前記障害物の経路とが交差する領域をコンフリクトエリアとしてコンフリクトエリア情報取得部で取得する、請求項1に記載の障害物行動予測装置。
【請求項6】
請求項1から5のいずれか1項に記載の障害物行動予測装置と、前記移動体の行動を計画する行動計画部と、を備えた移動体制御装置であって、
前記行動計画部は、
前記障害物行動予測装置からの出力に基づいて、前記移動体が前記移動体の経路と前記障害物の経路とが交差する領域を通過可能か否か判定し、前記移動体の行動を計画する、移動体制御装置。
【請求項7】
前記行動計画部は、
前記移動体の位置情報を取得する自己位置情報取得部と、
前記移動体を停止させる目標位置を生成する目標位置生成部と、を備え、
前記目標位置生成部は、
前記移動体が前記移動体の経路と前記障害物の経路とが交差する領域を通過可能と判定された場合、前記自己位置情報取得部で取得された位置に基づいて、前記移動体の経路と前記障害物の経路とが交差する領域を超えた位置に前記目標位置を生成し、
前記移動体が前記移動体の経路と前記障害物の経路とが交差する領域を通過可能と判定されなかった場合、前記自己位置情報取得部で取得された位置に基づいて、前記移動体の経路と前記障害物の経路とが交差する領域との境界線前の位置に前記目標位置を生成する、請求項6に記載の移動体制御装置。
【請求項8】
前記行動計画部は、さらに、前記移動体が前記自車行動制限エリアのどのエリアに存在するか判定するエリア判定部を備え、
前記目標位置生成部は、
前記エリア判定部により、前記移動体が前記移動体の経路と前記障害物の経路とが交差する領域であるコンフリクトエリアに存在しないと判定され、かつ前記障害物行動予測装置により、前記障害物が前記コンフリクトエリアに進入する可能性が低いと判定された場合、前記移動体は前記コンフリクトエリアを超えた位置に前記目標位置を生成し、
前記エリア判定部により、前記移動体が前記コンフリクトエリアに存在しないと判定され、かつ前記障害物行動予測装置により、前記障害物が前記コンフリクトエリアに進入する可能性が高いと判定された場合、前記移動体は前記コンフリクトエリアとの境界線前に前記目標位置を生成し、
前記エリア判定部により、前記移動体が前記コンフリクトエリアに存在すると判定された場合、前記目標位置を変更しない、請求項7に記載の移動体制御装置。
【請求項9】
移動体が障害物の通過を妨げないように、前記障害物の行動を予測する障害物行動予測装置を用いた障害物行動予測方法であって、
前記移動体の周辺の前記障害物の情報であって少なくとも前記障害物の位置情報を含む障害物情報を取得し、
前記移動体の経路と前記障害物の経路とが交差する領域を含み、前記障害物を監視するための自車行動制限エリアを取得し、
取得された前記障害物情報と、取得された前記自車行動制限エリアに基づいて、前記障害物が前記自車行動制限エリアに存在するかを判定し、
判定結果に基づいて、前記障害物が前記移動体の経路と前記障害物の経路とが交差する領域に進入するかを判定する、障害物行動予測方法。
【請求項10】
前記自車行動制限エリアを取得する時に、
前記自車行動制限エリアの内部で前記移動体の経路と前記障害物の経路とが交差する領域をコンフリクトエリアとして取得し、
前記コンフリクトエリア以外の領域を自車行動制限エリアとして取得し、
前記障害物が前記自車行動制限エリアに存在すると判定された場合、
前記障害物が前記コンフリクトエリアに進入する可能性が高いと判定する、請求項9に記載の障害物行動予測方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、障害物行動予測装置、移動体制御装置、障害物行動予測方法、及び移動体制御方法に関するものである。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
移動体が定められた経路を自動運転する際、経路上に進入する動的障害物に対し、例えば回避行動よって適切に移動体を制御して目的地まで走行する必要がある。障害物を回避する場合、障害物が複数あれば、それぞれに対して障害物の動き等の情報を予測する必要がある。
【0003】
これに対し、自車両の走行経路以外の経路から自車両の走行経路に進入する物体の情報を先行車より取得し、先行車が取得した情報から自車両の走行経路に進入する障害物の詳細な動きを予測し、自車進行経路に進入するか判定する技術が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
特開2010―3252号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1の手法を用いた場合、例えば交差点のような複数の道路で構成される領域では、多方面に複数存在する障害物を検出し、各障害物に対し移動予測を行わなければならない。そのため、迅速に計算するには多大なコストを要してしまうことが課題となる。
【0006】
本開示は、上記の課題を解決するためになされたものであり、交差点のような複数の道路で構成されるエリアに存在する動的障害物に対して、簡便な方法で障害物の行動を予測可能な障害物行動予測装置、障害物行動予測方法、移動体制御装置及び移動体制御方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
本開示の障害物行動予測装置は、
移動体が障害物の通過を妨げないように、前記障害物の行動を予測する障害物行動予測装置であって、
前記移動体の周辺の前記障害物の情報であって少なくとも前記障害物の位置情報を含む障害物情報を取得する障害物情報取得部と、
前記移動体の経路と前記障害物の経路とが交差する領域を含み、前記障害物を監視するための自車行動制限エリアを取得するエリア情報取得部と、
前記障害物情報取得部で取得された前記障害物情報と、前記エリア情報取得部で取得された前記自車行動制限エリアに基づいて、前記障害物が前記自車行動制限エリアに存在するかを判定する障害物存在判定部と、
前記障害物存在判定部の判定結果に基づいて、前記障害物が前記移動体の経路と前記障害物の経路とが交差する領域に進入するかを判定する障害物進入判定部と、を備えた、ものである。
【発明の効果】
【0008】
本開示によれば、簡便な方法で障害物の行動を予測可能な障害物行動予測装置、障害物行動予測方法、移動体制御装置及び移動体制御方法を提供することが可能となる。
【図面の簡単な説明】
【0009】
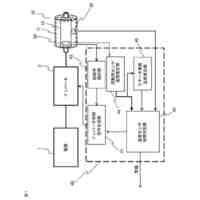
実施の形態1に係る障害物行動予測装置の構成例を示すブロック図である。
実施の形態1に係る障害物行動予測装置の構成例を示すブロック図である。
特定領域を説明するための図である。
車両に搭載された障害物情報検出部による障害物の検出範囲の例を示す図である。
優先道路及び非優先道路の設定方法を説明するための図である。
優先道路及び非優先道路の設定方法を説明するための図である。
自車行動制限エリアの設定方法を説明するための図である。
図6におけるエリアの種類とその領域を示すエリアIDとの対応を示す図である。
コンフリクトエリアを説明するための図である。
コンフリクトエリアを説明するための図である。
自車行動制限エリアの設定方法を説明するための図である。
自車行動制限エリアの設定方法を説明するための図である。
優先道路自車行動制限エリア及び非優先道路自車行動制限エリアを設定した例を示す図である。
優先道路自車行動制限エリア及び非優先道路自車行動制限エリアを設定した別の例を示す図である。
図13における各エリアの情報を示す図である。
実施の形態1に係る障害物行動予測装置の動作フローを示すフローチャートである。
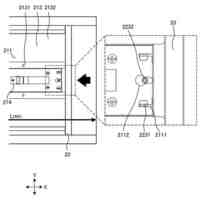
移動体及び障害物の外観を示す図である。
障害物がコンフリクトエリアに存在すると判定する例を示す図である。
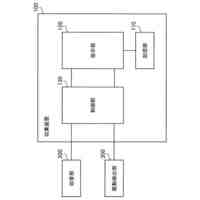
実施の形態2に係る移動体制御装置の構成例を示すブロック図である。
移動体が走行する目標位置の設定方法を説明するための図である。
移動体が停止する目標位置の設定方法を説明するための図である。
実施の形態2に係る移動体制御装置の動作フローを示すフローチャートである。
実施の形態2に係る移動体制御装置の動作フローを示すフローチャートである。
実施の形態2に係る移動体制御装置の別の動作フローを示すフローチャートである。
実施の形態2に係る移動体制御装置の別の動作フローを示すフローチャートである。
五差路を移動体が通過する様子を示す図である。
五差路を移動体が通過する様子を示す図である。
五差路に設定されたコンフリクトエリア及び自車行動制限エリアを示す図である。
五差路に設定された各エリアの情報を示す図である。
五差路において、移動体の目標位置の設定方法を説明するための図である。
実施の形態3において、障害物が優先道路自車行動制限エリアに存在する例を示す図である。
図27における各エリアの情報を示す図である。
移動体が西から東へ通過する例を示す図である。
移動体が西から北へ左折して通過する例を示す図である。
実施の形態4に係る障害物行動予測装置及び移動体制御装置の動作を説明するための図である。
図32に示す各道路に自車行動制限エリアの設定方法を説明するための図である。
図32における各エリアの情報を示す図である。
実施の形態5に係る障害物行動予測装置及び移動体制御装置の動作を説明するための図である。
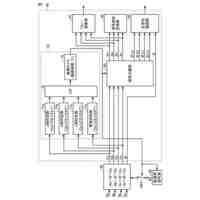
障害物行動予測装置、移動体制御装置及び行動計画部のハードウェア構成例を示す図である。
障害物行動予測装置、移動体制御装置及び行動計画部のハードウェア構成の別の例を示す図である。
【発明を実施するための形態】
【0010】
以下、本開示による障害物行動予測装置、障害物行動予測方法、移動体制御装置及び移動体制御方法の実施の形態について図を参照して説明する。なお、各図中、同一符号は、同一または相当する部分を示すものとする。従って、それらについての詳細な説明を、重複を避けるために省略する場合がある。
また、以下の実施の形態において、移動体は車両である例で説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
三菱電機株式会社
扇風機
22日前
三菱電機株式会社
冷蔵庫
24日前
三菱電機株式会社
換気扇
1か月前
三菱電機株式会社
冷蔵庫
1日前
三菱電機株式会社
換気扇
1か月前
三菱電機株式会社
換気扇
1か月前
三菱電機株式会社
増幅器
28日前
三菱電機株式会社
電子機器
1か月前
三菱電機株式会社
回転電機
2か月前
三菱電機株式会社
照明装置
2か月前
三菱電機株式会社
回転電機
1か月前
三菱電機株式会社
収集装置
1か月前
三菱電機株式会社
照明装置
15日前
三菱電機株式会社
電気機器
1日前
三菱電機株式会社
保護リレー
23日前
三菱電機株式会社
加熱調理器
9日前
三菱電機株式会社
加熱調理器
1か月前
三菱電機株式会社
半導体装置
1日前
三菱電機株式会社
回路遮断器
9日前
三菱電機株式会社
空気調和機
1か月前
三菱電機株式会社
半導体装置
1か月前
三菱電機株式会社
半導体装置
1か月前
三菱電機株式会社
半導体装置
23日前
三菱電機株式会社
貯湯式給湯機
25日前
三菱電機株式会社
制御システム
15日前
三菱電機株式会社
貯湯式給湯機
24日前
三菱電機株式会社
調理システム
24日前
三菱電機株式会社
給湯システム
1か月前
三菱電機株式会社
点検管理装置
22日前
三菱電機株式会社
照明システム
1か月前
三菱電機株式会社
貯湯式給湯機
1か月前
三菱電機株式会社
空調システム
17日前
三菱電機株式会社
ねじ締め装置
28日前
三菱電機株式会社
光源デバイス
15日前
三菱電機株式会社
空気清浄装置
9日前
三菱電機株式会社
空調システム
28日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ