TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025160262
公報種別
公開特許公報(A)
公開日
2025-10-22
出願番号
2025119581,2023526817
出願日
2025-07-16,2021-06-11
発明の名称
測定システム、及び測定方法
出願人
株式会社ニコン
代理人
個人
,
個人
,
個人
主分類
G01C
15/00 20060101AFI20251015BHJP(測定;試験)
要約
【課題】ロボットの制御において当該ロボットの位置を高精度で測定する測定システムを提供する。
【解決手段】可動部を備えるロボットに対して移動可能な移動装置と、移動装置に設けられて、移動装置と共に移動する測定装置1とを備え、測定装置1は、ロボットR1、R2の可動部に設けられた被計測反射素子に測定光を照射すると共に、移動装置が配された空間内の基準位置に配置された基準反射素子に基準測定光を照射する照射部と、被計測反射素子からの測定光の反射光、および、基準反射素子からの基準測定光の基準反射光に基づいて、ロボットが位置する空間内での基準位置に対して、可動部に設けられた被計測反射素子の位置に関する位置情報または距離情報を取得する測定部とを備える。
【選択図】図1
特許請求の範囲
【請求項1】
可動部を備えるロボットに対して移動可能な移動装置と、
前記移動装置に設けられて、前記移動装置と共に移動する測定装置と
を備え、
前記測定装置は、
前記ロボットの前記可動部に設けられた被計測反射素子に測定光を照射すると共に、前記移動装置が配された空間内の基準位置に配置された基準反射素子に基準測定光を照射する照射部と、
前記被計測反射素子からの前記測定光の反射光、および、前記基準反射素子からの前記基準測定光の基準反射光に基づいて、前記ロボットが位置する空間内での前記基準位置に対して、前記可動部に設けられた前記被計測反射素子の位置に関する位置情報または距離情報を取得する測定部と
を備える測定システム。
続きを表示(約 1,300 文字)
【請求項2】
前記被計測反射素子を介した前記照射部から前記測定光である前記反射光を受光した結果と、前記基準反射素子を介した前記照射部からの基準測定光である前記基準反射光を受光した結果とに基づいて、前記被計測反射素子の前記基準位置に対する位置情報が生成される
請求項1に記載の測定システム。
【請求項3】
前記基準反射素子は、第1基準反射素子、第2基準反射素子及び第3基準反射素子を備え、
前記第1基準反射素子を介した前記照射部からの基準測定光である前記基準反射光を受光した第1結果と、前記第2基準反射素子を介した前記照射部からの基準測定光である前記基準反射光を受光した第2結果と、前記第3基準反射素子を介した前記照射部からの基準測定光である前記基準反射光を受光した第3結果と、前記被計測反射素子を介した前記照射部から前記測定光である前記反射光を受光した第4結果とに基づいて、前記被計測反射素子の前記基準位置に対する位置情報が生成される
請求項1に記載の測定システム。
【請求項4】
前記測定装置は、前記測定光を射出すると共に、前記被計測反射素子からの前記測定光の前記反射光を受光して前記被計測反射素子までの距離を測定する距離測定部と、前記距離測定部からの前記測定光の照射方向を変更する照射方向移動部とを備える
請求項1から請求項3のいずれか一項に記載の測定システム。
【請求項5】
前記照射方向移動部は、前記測定光を反射するビームステアリングミラーを備え、
前記ビームステアリングミラーは、経度方向及び緯度方向に回転可能である
請求項4に記載の測定システム。
【請求項6】
前記被計測反射素子が配される空間からの光を受光する検出部と、
前記検出部による検出結果に基づいて、前記被計測反射素子の位置を判別し、前記測定光が前記被計測反射素子に照射されるよう前記照射方向移動部を制御する制御部と
を備える
請求項4または請求項5に記載の測定システム。
【請求項7】
前記検出部は、検出面を備え、
前記検出面における前記被計測反射素子が配される空間からの前記光の位置を測定する
請求項6に記載の測定システム。
【請求項8】
前記検出部は、前記被計測反射素子を撮像するカメラを備える
請求項6または請求項7に記載の測定システム。
【請求項9】
前記照射方向移動部は、前記基準測定光が基準位置に関する基準反射素子に向かうよう前記照射方向を調整し、
前記測定部は、前記基準反射素子からの基準反射光を受光し、且つ前記検出部による受光結果に基づいて、前記被計測反射素子の前記基準位置に対する位置情報を生成する
請求項6から請求項8のいずれか一項に記載の測定システム。
【請求項10】
前記照射部は、前記移動装置が止まった後に、前記被計測反射素子に前記測定光を照射する
請求項1から請求項9のいずれか一項に記載の測定システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、測定システム、及び測定方法に関する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
ロボットや工作機械によって加工や組み立ての工程が自動で行われている。当該工程においては、加工や組み立ての精度を高めるために、制御対象のロボットのアームの位置や工作機械のスピンドルの先端の位置を高精度で測定する必要がある。例えば、ロボット装置の所定の一部の位置を外部の測定装置により測定する装置が知られている(特許文献1)。
ロボットの制御において当該ロボットの位置を高精度で測定することが求められている。
【先行技術文献】
【特許文献】
【0003】
国際公開第2007/002319号
【発明の概要】
【0004】
本発明の一態様は、可動部を備えるロボットに対して移動可能な移動装置と、前記移動装置に設けられて、前記移動装置と共に移動する測定装置とを備え、前記測定装置は、前記ロボットの前記可動部に設けられた被計測反射素子に測定光を照射すると共に、前記移動装置が配された空間内の基準位置に配置された基準反射素子に基準測定光を照射する照射部と、前記被計測反射素子からの前記測定光の反射光、および、前記基準反射素子からの前記基準測定光の基準反射光に基づいて、前記ロボットが位置する空間内での前記基準位置に対して、前記可動部に設けられた前記被計測反射素子の位置に関する位置情報または距離情報を取得する測定部とを備える測定システムである。
【0005】
本発明の一態様は、可動部を備えるロボットに対して移動可能な移動装置に設けられた測定装置を、前記移動装置と共に移動させることと、前記前記ロボットの前記可動部に設けられた被計測反射素子を前記測定装置からの測定光で計測することと、前記移動装置が配された空間内の基準位置に配置された基準反射素子を前記測定装置からの基準測定光で計測することと、前記被計測反射素子からの前記測定光の反射光、および、前記基準反射素子からの前記基準測定光の基準反射光に基づいて、前記ロボットが位置する空間内での前記基準位置に対して、前記可動部に設けられた前記被計測反射素子の位置に関する位置情報または距離情報を取得することとを含む測定方法である。
【図面の簡単な説明】
【0006】
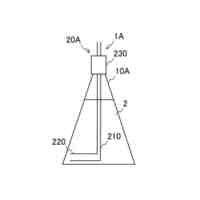
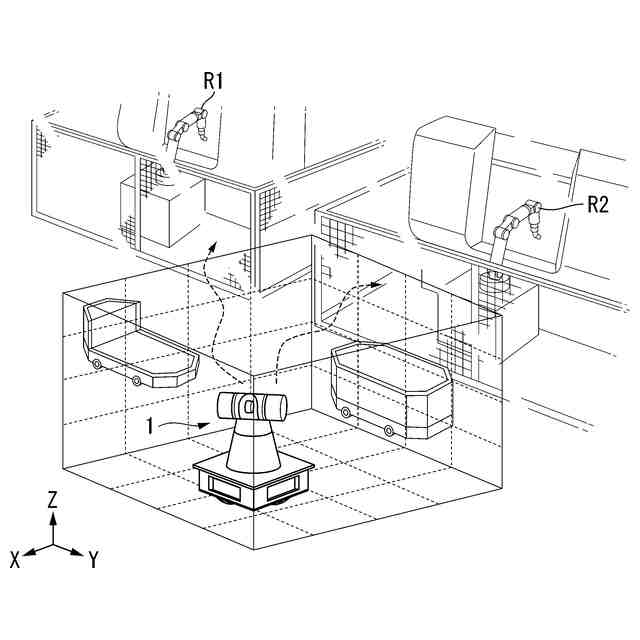
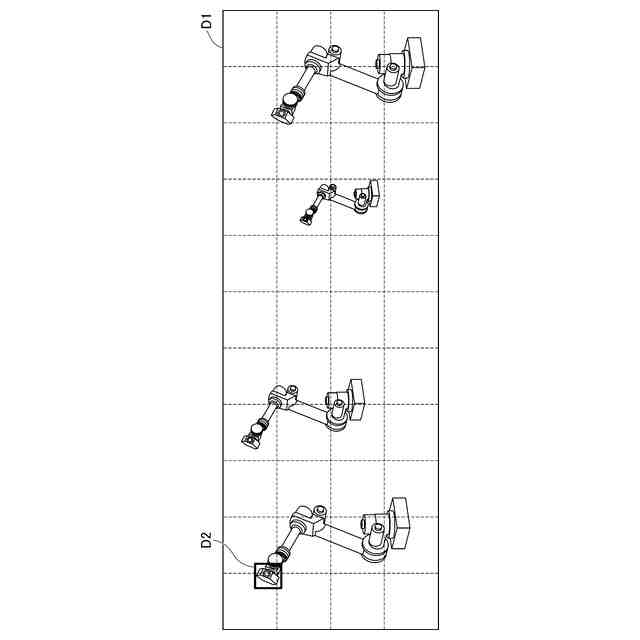
第1の実施形態に係る移動型位置測定装置が工場内を移動する様子の一例を示す図である。
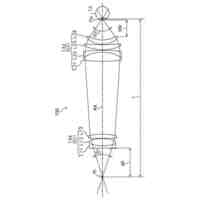
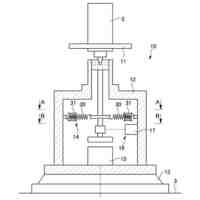
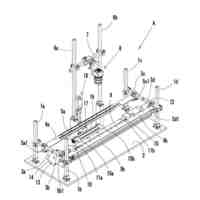
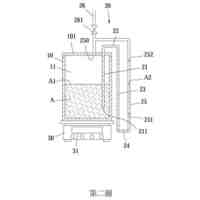
第1の実施形態に係る移動型位置測定装置の外観の一例を示す図である。
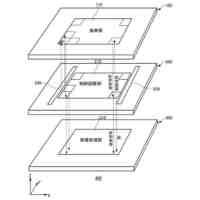
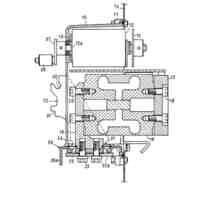
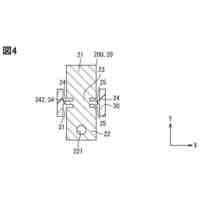
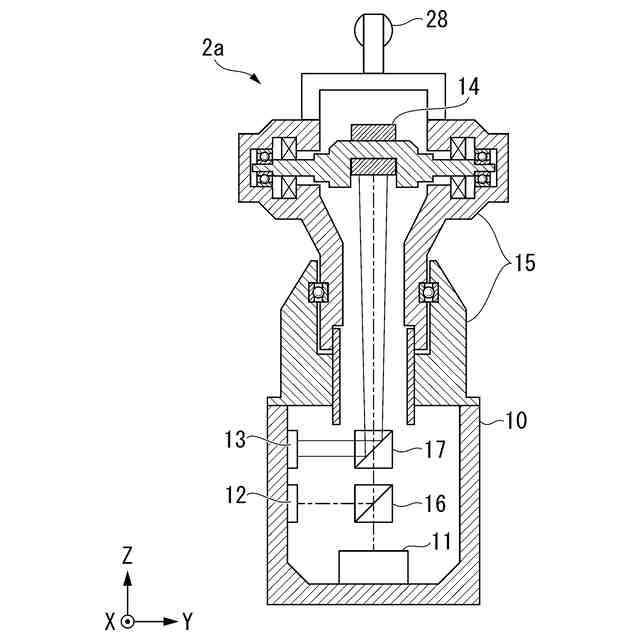
第1の実施形態に係る位置測定装置の構成の一例を示す図である。
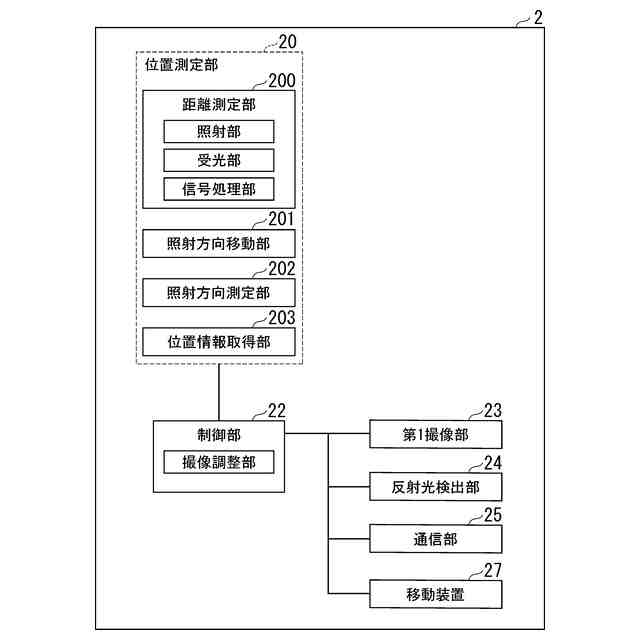
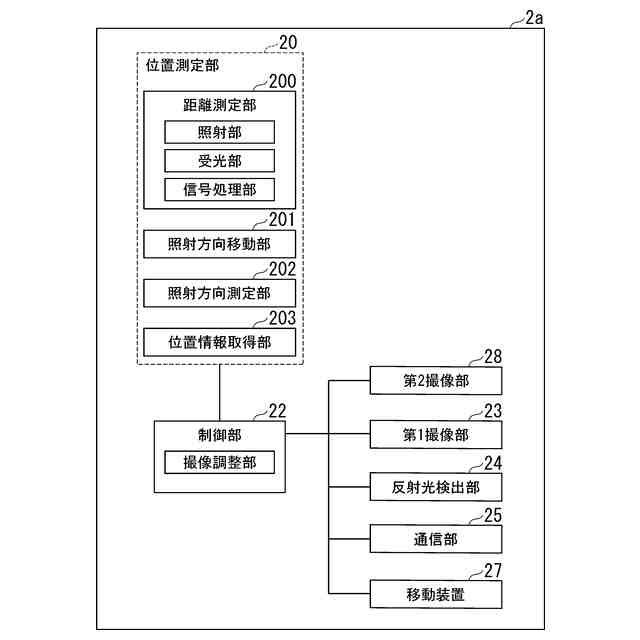
第1の実施形態に係る位置測定装置の機能構成の一例を示す図である。
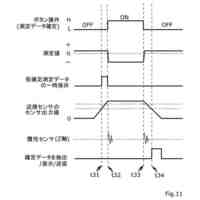
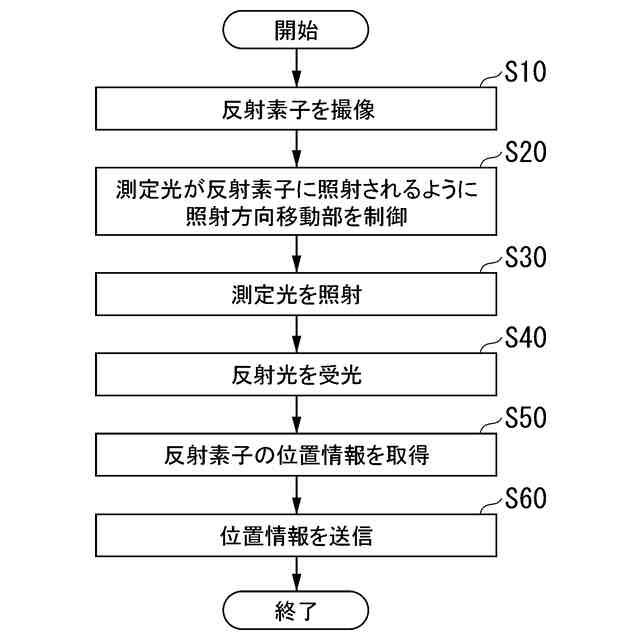
第1の実施形態に係る位置測定処理の一例を示す図である。
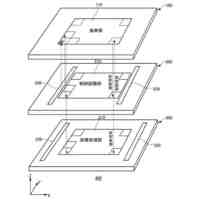
第2の実施形態に係る位置測定装置の構成の一例を示す図である。
第2の実施形態に係る位置測定装置の機能構成の一例を示す図である。
第2の実施形態に係る位置測定処理の一例を示す図である。
第2の実施形態に係る第2撮像部の撮像結果の一例を示す。
第3の実施形態に係る位置測定装置の機能構成の一例を示す図である。
第3の実施形態に係る位置測定処理の一例を示す図である。
第4の実施形態に係る移動型位置測定装置が基準位置を測定する様子の一例を示す図である。
第4の実施形態に係る位置測定装置の機能構成の一例を示す図である。
第4の実施形態に係る位置測定処理の一例を示す図である。
第4の実施形態に係る基準位置情報生成処理の一例を示す図である。
第5の実施形態に係る移動型位置測定装置の動作の様子の一例を示す図である。
第5の実施形態に係る反射素子がホルダーに着脱される様子の一例を示す図である。
第6の実施形態に係る移動型位置測定装置が制御システムを制御する様子の一例を示す図である。
第7の実施形態に係る移動型位置測定装置が複数のロボットを制御する様子の一例を示す図である。
第8の実施形態に係る位置測定装置が光学スキャナの位置情報を測定する様子の一例を示す図である。
第9の実施形態に係る位置測定装置がタービンの組み立て及び加工の工程において位置情報を測定する様子の一例を示す図である。
【発明を実施するための形態】
【0007】
(第1の実施形態)
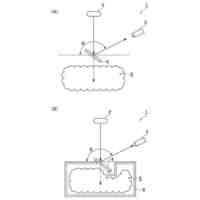
以下、図面を参照しながら第1の実施形態について詳しく説明する。図1は、本実施形態に係る移動型位置測定装置1が工場内を移動する様子の一例を示す図である。移動型位置測定装置1は、工場内を自由に移動可能である。移動型位置測定装置1は、工場内に配置された工作機械やロボットなどの測定対象の位置を高精度に測定する装置であり、この測定結果によって高精度に工作機械やロボットの位置が自動校正することが可能になる。
【0008】
移動型位置測定装置1は、測定対象の可動部に配置された反射素子4に測定光を照射し、反射光を受光する。移動型位置測定装置1は、受光結果に基づいて位置情報を測定する。位置情報とは、基準位置に対する反射素子4の位置を示す情報である。基準位置は、反射素子4が配置される空間内の所定の位置である。
【0009】
位置情報は、反射素子4が配置される空間内における座標系(基準座標系という)の座標によって示される。位置情報は、例えば、図1に示す直角座標(X、Y、Z)によって示される。座標X、座標Y、及び座標Zの組は、直角座標(X、Y、Z)内の位置を示す。なお、座標X、座標Y、座標Zはそれぞれ、X方向の距離、Y方向の距離、Z方向の距離と呼ばれてもよい。なお、図1の直角座標において、X軸を中心とする回転方向の角度成分、Y軸を中心とする回転方向の角度成分、及びZ軸を中心とする回転方向の角度成分は、それぞれ位置に関する情報と呼ばれてもよい。また、位置を球座標によって示した場合に、当該球座標の角度成分はそれぞれ、位置に関する情報と呼ばれてもよい。また、位置を円柱座標によって示した場合に、当該円柱座標の角度成分は、位置に関する情報と呼ばれてもよい。なお、図1では、移動型位置測定装置1の周辺の座標系を併せて例示してある。
【0010】
移動型位置測定装置1は、測定した位置情報を、工作機械やロボットの制御システムに送信する。基準位置、及び座標系は、移動型位置測定装置1と制御システムとの間で予め共有されている。当該制御システムは、移動型位置測定装置1から受信した位置情報に基づいて、工作機械やロボットの位置を取得できるため、工作機械やロボットを高精度に校正できる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社ニコン
撮像素子
15日前
株式会社ニコン
撮像素子
13日前
株式会社ニコン
撮像素子および撮像装置
2日前
株式会社ニコン
撮像素子および撮像装置
13日前
株式会社ニコン
撮像素子および撮像装置
15日前
株式会社ニコン
眼科用光学系及び眼科装置
2日前
株式会社ニコン
眼科装置及び眼科撮影方法
15日前
株式会社ニコン
リレー光学系、及びアタッチメント
2日前
株式会社ニコン
フォトマスク用基板の製造方法、フォトマスクブランクスの製造方法、フォトマスクの製造方法、フォトマスク用基板の再利用方法、フォトマスク用基板、フォトマスクブランクス、フォトマスク、石英ガラス基板の加工装置
16日前
株式会社ニコン
フッ化バリウム焼結体、フッ化ランタンドープフッ化バリウム焼結体、フッ化バリウム粒子の製造方法、フッ化バリウム焼結体の製造方法、フッ化ランタンドープフッ化バリウム粒子の製造方法、フッ化ランタンドープフッ化バリウム焼結体の製造方法、光学素子、光学系、交換レンズおよび光学装置
15日前
個人
採尿及び採便具
21日前
日本精機株式会社
検出装置
15日前
個人
アクセサリー型テスター
1か月前
個人
計量機能付き容器
10日前
個人
高精度同時多点測定装置
1か月前
株式会社ミツトヨ
測定器
27日前
甲神電機株式会社
電流検出装置
15日前
アズビル株式会社
電磁流量計
1か月前
大成建設株式会社
風洞実験装置
10日前
大和製衡株式会社
組合せ計量装置
24日前
大和製衡株式会社
組合せ計量装置
24日前
双庸電子株式会社
誤配線検査装置
16日前
日本信号株式会社
距離画像センサ
13日前
長崎県
形状計測方法
1か月前
個人
システム、装置及び実験方法
1か月前
愛知時計電機株式会社
ガスメータ
27日前
日本特殊陶業株式会社
ガスセンサ
8日前
愛知電機株式会社
軸部材の外観検査装置
24日前
ローム株式会社
半導体装置
1か月前
個人
非接触による電磁パルスの測定方法
13日前
ローム株式会社
半導体装置
1か月前
個人
計量具及び計量機能付き容器
10日前
トヨタ自動車株式会社
測定システム
1か月前
日本特殊陶業株式会社
センサ
27日前
個人
液位検視及び品質監視システム
8日前
株式会社デンソー
電流センサ
1か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ