TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025095965
公報種別
公開特許公報(A)
公開日
2025-06-26
出願番号
2023212376
出願日
2023-12-15
発明の名称
ピックアップ方法、ピックアップ装置およびピックアップシステム
出願人
新東工業株式会社
代理人
弁理士法人 HARAKENZO WORLD PATENT & TRADEMARK
主分類
B25J
15/08 20060101AFI20250619BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】部品の頭部を容易に把持可能なピックアップ方法を提供する。
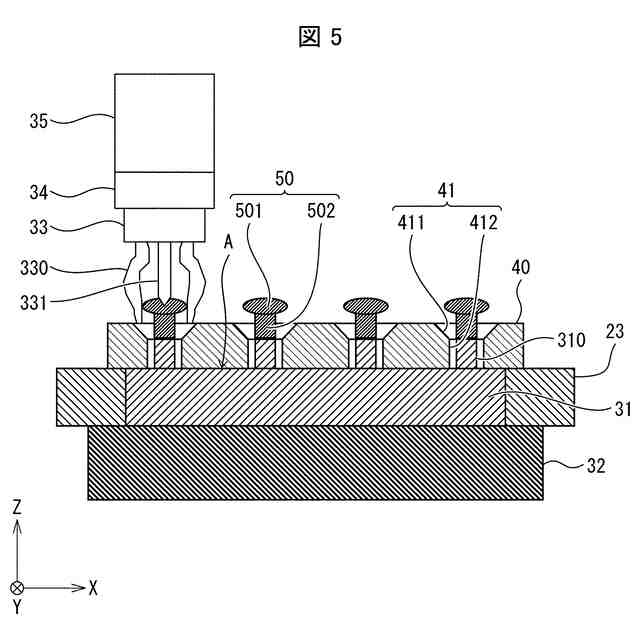
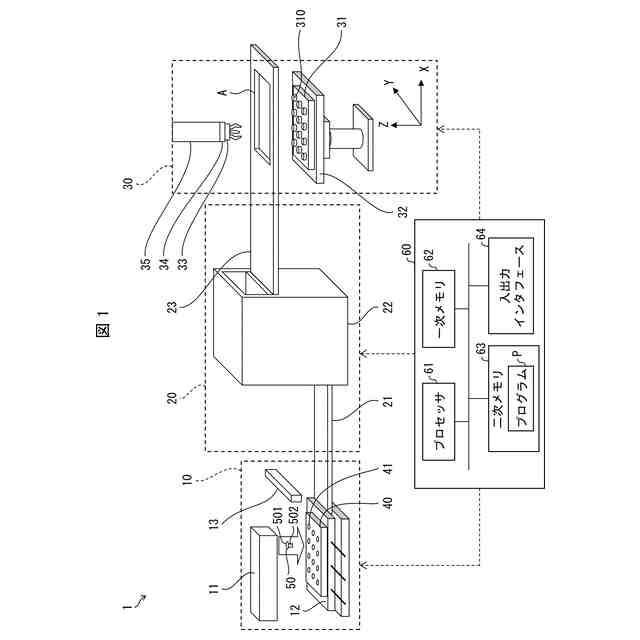
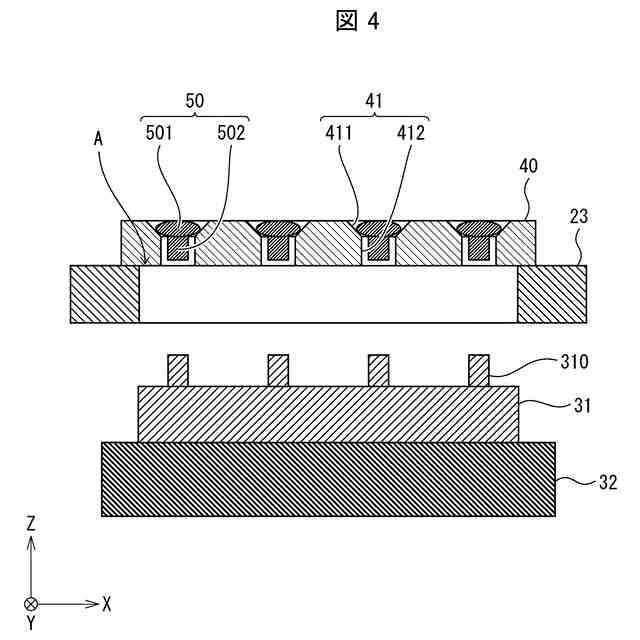
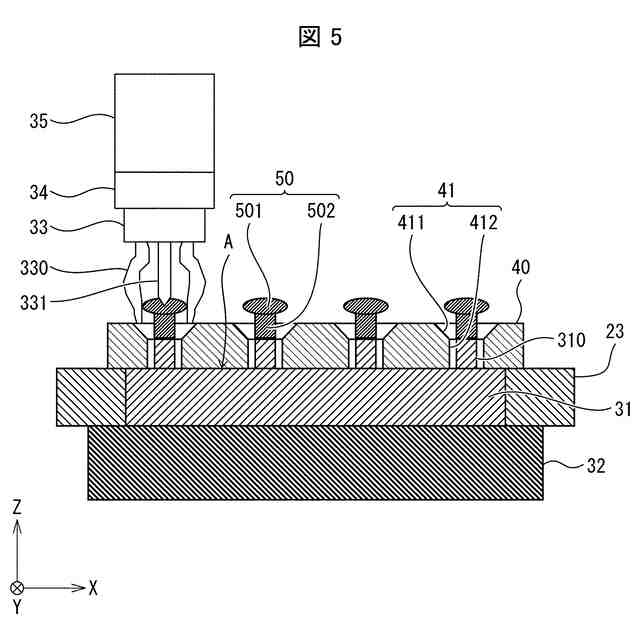
【解決手段】ピックアップ方法では、柱状の突出部(310)を上面に有するプレート(31)とトレイ(40)の下面とを接近させ、突出部(310)と軸部(502)とを当接させ、頭部(501)をトレイ(40)の上面よりも上方の位置へ押し上げ、その頭部(501)を、ロボットハンド(33)に把持させる。
【選択図】図5
特許請求の範囲
【請求項1】
制御装置の制御に基づいて、ロボットハンドがトレイから部品をピックアップするピックアップ方法であって、
前記部品は、頭部から軸部が延伸しており、
前記トレイは、前記頭部を内側に収容可能な凹部を上面に有し、前記凹部から下面に向けて貫通し、前記軸部を収容可能な貫通孔を有しており、
柱状の突出部を上面に有するプレートと前記トレイの下面とを接近させ、前記突出部と前記軸部とを当接させ、前記頭部を前記トレイの上面よりも上方の位置へ押し上げる第1工程と、
前記トレイの上面よりも上方の位置へ押し上げられた前記頭部を、前記ロボットハンドに把持させる第2工程と、を含んでいるピックアップ方法。
続きを表示(約 610 文字)
【請求項2】
前記ロボットハンドは、前記部品を把持する把持部と、前記部品に応じた工具とを有しており、
前記第2工程において、前記制御装置は、前記把持部により把持された前記頭部に対して前記工具を回転させながら、前記頭部から前記ロボットハンドに加わる力を力覚センサにより検出し、前記力覚センサにより検出された力に基づいて前記頭部に前記工具を装着させる、請求項1に記載のピックアップ方法。
【請求項3】
制御装置と、
頭部から軸部が延伸する部品の前記頭部を内側に収容可能な凹部を上面に有し、前記凹部から下面に向けて貫通し、前記軸部を収容可能な貫通孔を有するトレイと、
前記トレイの下面よりも下方に配置され、上面に柱状の突出部を有するプレートと、
前記プレートまたは前記トレイを上下させる昇降部と、
ロボットハンドと、を備え、
前記制御装置は、前記昇降部を制御して、前記プレートと前記トレイの下面とを接近させ、前記突出部と前記軸部とを当接させ、前記頭部を前記トレイの上面よりも上方の位置へ押し上げ、押し上げられた前記頭部を、前記ロボットハンドに把持させる、ピックアップ装置。
【請求項4】
請求項3に記載のピックアップ装置と、
前記トレイの上面に部品を供給し、前記部品を前記トレイに収容させる収容装置と、を備える、ピックアップシステム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ピックアップ方法、ピックアップ装置およびピックアップシステムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
特許文献1には、軸部と頭部を有する部品を搬送する間に部品の姿勢を調整する部品搬送システムが開示されている。特許文献2には、ピッキングロボットのアームに固定され、チューブラックに収容されたチューブをフィンガーによって把持するワーク把持装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2016-23079号公報
特開2004-223674号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、軸部と頭部を有する部品によっては、部品が収容部に収容された状態において、頭部が収容部から充分に突出せず、頭部の把持が困難な場合がある。
【0005】
本開示の一態様は、部品の頭部を容易に把持可能なピックアップ方法の提供を目的とする。
【課題を解決するための手段】
【0006】
上記の課題を解決するために、本開示の一態様に係るピックアップ方法は、制御装置の制御に基づいて、ロボットハンドがトレイから部品をピックアップするものである。前記部品は、頭部から軸部が延伸している。前記トレイは、前記頭部を内側に収容可能な凹部を上面に有し、前記凹部から下面に向けて貫通し、前記軸部を収容可能な貫通孔を有している。ピックアップ方法には、柱状の突出部を上面に有するプレートと前記トレイの下面とを接近させ、前記突出部と前記軸部とを当接させ、前記頭部を前記トレイの上面よりも上方の位置へ押し上げる第1工程が含まれている。また、ピックアップ方法には、前記トレイの上面よりも上方の位置へ押し上げられた前記頭部を、前記ロボットハンドに把持させる第2工程が含まれている。
【0007】
上記の課題を解決するために、本開示の一態様に係るピックアップ装置は、制御装置、トレイ、プレート、昇降部およびロボットハンドを備えている。前記トレイは、頭部から軸部が延伸する部品の前記頭部を内側に収容可能な凹部を上面に有し、前記凹部から下面に向けて貫通し、前記軸部を収容可能な貫通孔を有している。前記プレートは、前記トレイの下面よりも下方に配置され、上面に柱状の突出部を有している。前記昇降部は、前記プレートまたは前記トレイを上下させる。前記制御装置は、前記昇降部を制御して、前記プレートと前記トレイの下面とを接近させ、前記突出部と前記軸部とを当接させ、前記頭部を前記トレイの上面よりも上方の位置へ押し上げる。前記制御装置は、押し上げられた前記頭部を、前記ロボットハンドに把持させる。
【発明の効果】
【0008】
本開示の一態様によれば、部品の頭部を容易に把持できる。
【図面の簡単な説明】
【0009】
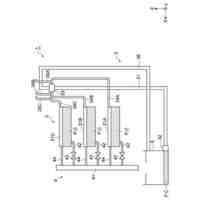
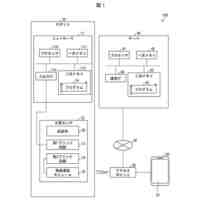
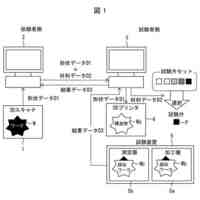
本開示の一実施形態に係るピックアップシステムの一例を模式的に示すシステム構成図である。
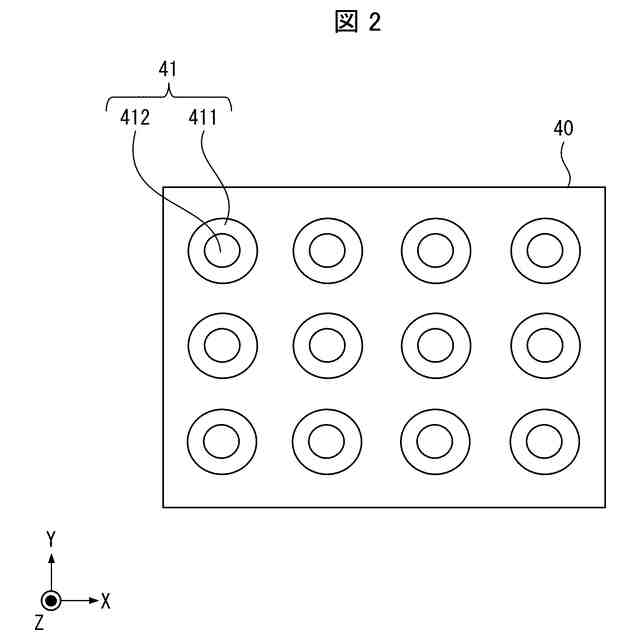
トレイの平面図である。
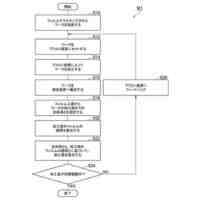
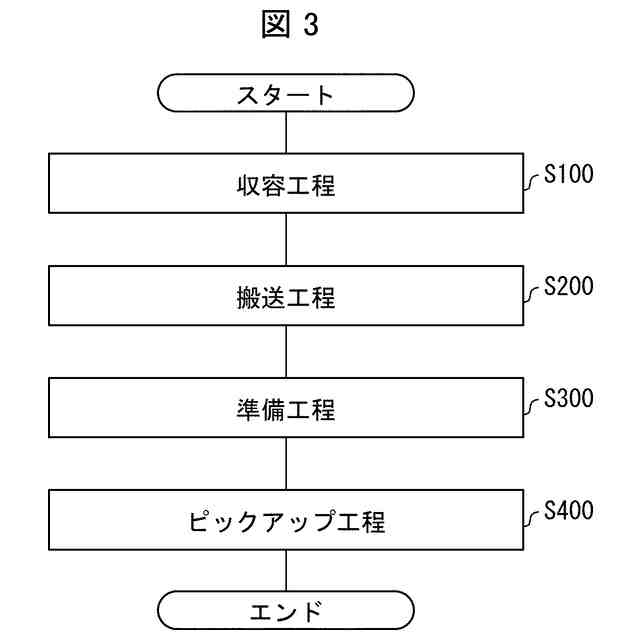
本開示の一実施形態に係るピックアップ方法の流れを示すフローチャートである。
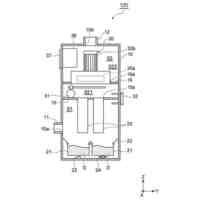
準備工程の説明に用いる図である。
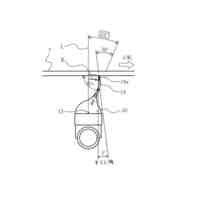
ピックアップ工程の説明に用いる図である。
【発明を実施するための形態】
【0010】
(ピックアップシステムの構成)
図1は、本開示の一実施形態に係るピックアップシステムの一例を模式的に示すシステム構成図である。図1に示すピックアップシステム1は、トレイ40に収容されたビス50を、トレイ40からピックアップするシステムである。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
新東工業株式会社
培養システム
27日前
新東工業株式会社
体感システム
27日前
新東工業株式会社
ベルトクリーナ
1か月前
新東工業株式会社
集塵装置及び集塵システム
26日前
新東工業株式会社
集塵システム及び報知システム
27日前
新東工業株式会社
情報処理装置、及び監視システム
8日前
新東工業株式会社
力覚センサ、及びセンサシステム
26日前
新東工業株式会社
ワークの加工方法、及び測定システム
2か月前
新東工業株式会社
鉄基アモルファス合金、その粉粒体、及びその圧粉材
26日前
新東工業株式会社
試験システム
6日前
新東工業株式会社
アルミニウム合金部材の製造方法、及び、ショットピーニング装置
6日前
個人
折りたたみ工具
1か月前
個人
フラワーホッチキス。
22日前
個人
手持ち挟持具
今日
川崎重工業株式会社
ロボット
1か月前
株式会社三協システム
製函機
1か月前
CKD株式会社
把持装置
1か月前
株式会社竹中工務店
補助セット
1か月前
株式会社不二越
ロボット
1か月前
株式会社三協システム
移載装置
1か月前
川崎重工業株式会社
ハンド
26日前
株式会社不二越
ロボット操作装置
2か月前
SMC株式会社
着脱装置
1か月前
株式会社ミクロブ
把持装置
1か月前
太陽パーツ株式会社
アシストスーツ
1か月前
株式会社マキタ
ハンマドリル
9日前
株式会社マキタ
ハンマドリル
9日前
トヨタ自動車株式会社
ロボット
29日前
工機ホールディングス株式会社
作業機
26日前
株式会社不二越
移動ロボットシステム
1か月前
株式会社不二越
ロボットシステム
1か月前
株式会社不二越
エッジ仕上げ装置
1か月前
株式会社不二越
ロボットシステム
1か月前
川崎重工業株式会社
塗装システム
26日前
本田技研工業株式会社
装置
1か月前
株式会社安川電機
ロボット
6日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ