TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025154451
公報種別
公開特許公報(A)
公開日
2025-10-10
出願番号
2024057455
出願日
2024-03-29
発明の名称
力覚センサ、及びセンサシステム
出願人
新東工業株式会社
代理人
弁理士法人 HARAKENZO WORLD PATENT & TRADEMARK
主分類
G01L
5/1627 20200101AFI20251002BHJP(測定;試験)
要約
【課題】力覚センサにより出力されたデータをリアルタイムで確認すること。
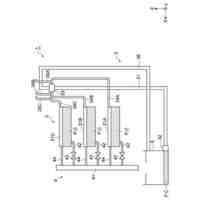
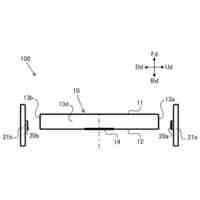
【解決手段】力覚センサ(12)は、起歪体(20)と、起歪体(20)に作用する特定の方向の力、又は、起歪体(20)に作用する特定の軸回りのモーメントを検出する第1ブリッジ回路(13)と、第1ブリッジ回路(13)が検出する力と同じ方向の力、又は、第1ブリッジ回路(13)が検出するモーメントと同じ軸回りのモーメントを検出する第2ブリッジ回路(14)と、第2ブリッジ回路(14)から出力される信号をサーバ(40)及び/又は端末装置(50)に無線送信するための無線通信モジュール(15)と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
起歪体と、
前記起歪体に設けられた第1歪ゲージ群を含み、前記起歪体に作用する特定の方向の力、又は、前記起歪体に作用する特定の軸回りのモーメントを検出する第1ブリッジ回路と、
前記起歪体に設けられた第2歪ゲージ群を含み、前記第1ブリッジ回路が検出する力と同じ方向の力、又は、前記第1ブリッジ回路が検出するモーメントと同じ軸回りのモーメントを検出する第2ブリッジ回路と、
前記第2ブリッジ回路と接続された無線通信モジュールであって、前記第2ブリッジ回路から出力される信号を第1の装置に無線送信するための無線通信モジュールと、を備える、
力覚センサ。
続きを表示(約 430 文字)
【請求項2】
前記第1ブリッジ回路と接続された出力端子であって、前記第1ブリッジ回路から出力される信号を前記第1の装置とは異なる第2の装置に有線送信するためのケーブルと接続可能な出力端子を更に備えている、
請求項1に記載の力覚センサ。
【請求項3】
前記無線通信モジュールは、無線LANモジュールである、請求項1に記載の力覚センサ。
【請求項4】
請求項1~3のいずれか1項に記載の力覚センサと、サーバと、を備えるセンサシステムであって、
前記サーバは、
前記無線通信モジュールを介して前記第2ブリッジ回路から出力された信号を受信する受信処理と、
前記第2ブリッジ回路が検出した前記起歪体に作用する特定の方向の力、又は、前記起歪体に作用する特定の軸回りのモーメントの少なくともいずれかを、前記サーバに接続された端末装置のディスプレイに表示する表示処理と、を実行する、
センサシステム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、力覚センサ、及びセンサシステムに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
特許文献1には、加工対象物となる被固定物を固定するためのクランプ装置について記載されている。クランプ装置は、計測通信モジュールを備えている。計測通信モジュールは、クランプ装置の操作軸部材に取り付けられる歪ゲージによって得られたデータを表示装置に送信する無線通信部を備えている。歪ゲージには、リード線が設けられており、そのリード線が、操作軸部材の内部を通って計測通信モジュールに接続されている。
【先行技術文献】
【特許文献】
【0003】
特開2020-62711号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、力覚センサから出力された信号を無線送信することができれば、作業現場にいない確認者であっても、力覚センサから出力された信号をリアルタイムに確認することができる。
【0005】
しかしながら、力覚センサからの出力信号に基づき動作するロボットでは、力覚センサの歪ゲージがロボットのコントローラに接続されているため、他の装置にデータを無線送信するための無線通信モジュールを力覚センサの歪ゲージに接続することができない。また、特許文献1のクランプ装置は歪ゲージが検出したデータに基づいて動作する装置ではないため、特許文献1の技術は採用することができない。
【0006】
本開示の一態様は、力覚センサにより出力されたデータをリアルタイムで確認することを目的とする。
【課題を解決するための手段】
【0007】
上記の課題を解決するために、本開示の一態様に係る力覚センサは、起歪体と、前記起歪体に設けられた第1歪ゲージ群を含み、前記起歪体に作用する特定の方向の力、又は、前記起歪体に作用する特定の軸回りのモーメントを検出する第1ブリッジ回路と、前記起歪体に設けられた第2歪ゲージ群を含み、前記第1ブリッジ回路が検出する力と同じ方向の力、又は、前記第1ブリッジ回路が検出するモーメントと同じ軸回りのモーメントを検出する第2ブリッジ回路と、前記第2ブリッジ回路と接続された無線通信モジュールであって、前記第2ブリッジ回路から出力される信号を第1の装置に無線送信するための無線通信モジュールと、を備える。
【発明の効果】
【0008】
本開示の一態様によれば、力覚センサにより出力されたデータをリアルタイムで確認することができる。
【図面の簡単な説明】
【0009】
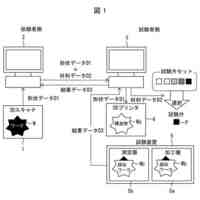
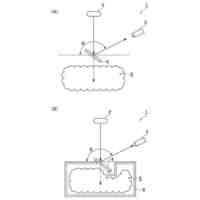
本開示の実施形態に係るセンサシステムの一例を示す概略構成図である。
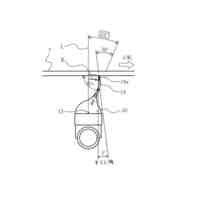
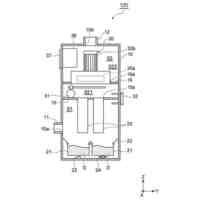
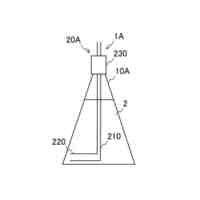
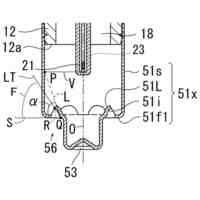
本開示の力覚センサが備える起歪体の構成を模式的に示す模式図である。
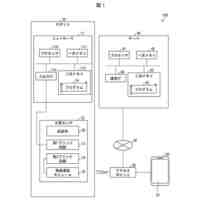
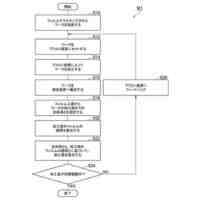
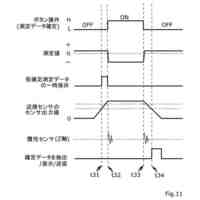
センサシステムのサーバが実行する制御方法の流れを示すフロー図である。
【発明を実施するための形態】
【0010】
(センサシステム100の概要)
以下、本開示の一実施形態に係るセンサシステム100の概略構成について、図1及び図2を参照して説明する。図1は、本開示の実施形態に係るセンサシステム100の一例を示す概略構成図である。図2は、力覚センサ12が備える起歪体20の構成を模式的に示す模式図である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
新東工業株式会社
体感システム
1か月前
新東工業株式会社
培養システム
1か月前
新東工業株式会社
粉体供給装置
4か月前
新東工業株式会社
ベルトクリーナ
2か月前
新東工業株式会社
集塵装置及び集塵システム
1か月前
新東工業株式会社
集塵システム及び報知システム
1か月前
新東工業株式会社
情報処理装置、及び監視システム
1か月前
新東工業株式会社
力覚センサ、及びセンサシステム
1か月前
新東工業株式会社
ワークの加工方法、及び測定システム
3か月前
新東工業株式会社
鉄基アモルファス合金、その粉粒体、及びその圧粉材
1か月前
新東工業株式会社
イベントシステム、アプリケーションプログラム、及び織物
19日前
新東工業株式会社
試験システム
1か月前
新東工業株式会社
アルミニウム合金部材の製造方法、及び、ショットピーニング装置
1か月前
個人
採尿及び採便具
1か月前
日本精機株式会社
検出装置
26日前
個人
アクセサリー型テスター
1か月前
個人
計量機能付き容器
21日前
個人
高精度同時多点測定装置
1か月前
甲神電機株式会社
電流検出装置
26日前
株式会社カクマル
境界杭
11日前
日本精機株式会社
発光表示装置
4日前
株式会社ミツトヨ
測定器
1か月前
株式会社トプコン
測量装置
3日前
アズビル株式会社
電磁流量計
1か月前
ダイキン工業株式会社
監視装置
1か月前
大成建設株式会社
風洞実験装置
21日前
トヨタ自動車株式会社
監視装置
1か月前
ローム株式会社
半導体装置
1か月前
長崎県
形状計測方法
1か月前
日本特殊陶業株式会社
ガスセンサ
3日前
ローム株式会社
半導体装置
1か月前
TDK株式会社
磁気センサ
1か月前
日本特殊陶業株式会社
ガスセンサ
19日前
個人
システム、装置及び実験方法
1か月前
個人
計量具及び計量機能付き容器
21日前
個人
非接触による電磁パルスの測定方法
24日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ