TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025085044
公報種別
公開特許公報(A)
公開日
2025-06-04
出願番号
2023198714
出願日
2023-11-23
発明の名称
作動量取得装置
出願人
トヨタ自動車株式会社
代理人
弁理士法人中部国際特許事務所
主分類
B62D
6/00 20060101AFI20250528BHJP(鉄道以外の路面車両)
要約
【課題】アクチュエータの作動量を取得する作動量取得装置において、作動量を良好に取得することである。
【解決手段】本作動量取得装置において、作動量検出装置によって検出された作動量に基づいてアクチュエータが制御される状態で、車両が予め定められた設定状態で走行している場合に、第1物理量検出装置によって検出された第1物理量に基づいて作動量を取得する。第1物理量の変化は作動量の変化に対して大きい。そのため、車両が設定状態で走行している場合の第1物理量に基づけば、作動量検出装置によって検出された作動量の妥当性を良好に取得することができる。
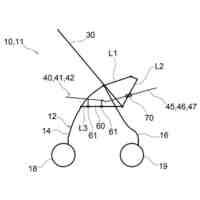
【選択図】図1
特許請求の範囲
【請求項1】
車両の幅方向に延びて配設された転舵ロッドと、
前記転舵ロッドを前記幅方向に移動可能なアクチュエータと
を含み、前記アクチュエータにより前記転舵ロッドを前記幅方向に移動させることにより、前記転舵ロッドに連結された前記車両の左後輪と右後輪との少なくとも一方を転舵する後輪転舵システムにおいて、前記アクチュエータの作動量を取得する作動量取得装置であって、
前記後輪転舵システムが、前記アクチュエータの作動量に基づいて前記左後輪と右後輪との少なくとも一方の転舵角を制御する制御装置を含み、
当該作動量取得装置が、
前記アクチュエータの作動量を検出する作動量検出装置と、
前記車両の前後方向軸線の前記車両の進行方向に対する傾きに関連する傾き関連値を検出する傾き関連値検出部と、
前記制御装置によって前記作動量検出装置によって検出された前記アクチュエータの作動量に基づいて、前記車両が直進走行状態となるように前記左後輪と右後輪との少なくとも一方の転舵角が制御される状態で、前記作動量検出装置によって検出された前記アクチュエータの作動量を前記傾き関連値検出部によって検出された値である検出傾き関連値に基づいて補正する作動量補正部と
を含む作動量取得装置。
続きを表示(約 2,600 文字)
【請求項2】
前記作動量補正部が、前記検出傾き関連値と、予め取得されて記憶されている前記車両が直進走行状態における前記傾き関連値である基準傾き関連値との差の絶対値が、第1しきい値より大きい場合に、前記アクチュエータの作動量を前記検出傾き関連値に基づいて補正する請求項1に記載の作動量取得装置。
【請求項3】
前記後輪転舵システムが、前記転舵ロッドの位置である中立位置からの変位を検出するロッド位置検出部を含み、
前記作動量補正部が、前記車両のメインスイッチがONからOFFに切り換わった場合に、前記作動量検出装置によって検出された前記アクチュエータの作動量に基づいて取得された前記転舵ロッドの位置であるOFF時ロッド位置と、前記メインスイッチがOFFからONに切り換わった場合に、前記ロッド位置検出部によって検出された前記転舵ロッドの位置であるON時ロッド位置との差の絶対値が、第2しきい値より大きい場合に、前記アクチュエータの作動量を前記ON時ロッド位置に基づいて補正する請求項1または2に記載の作動量取得装置。
【請求項4】
前記作動量補正部が、前記制御装置により、前記ON時ロッド位置に基づいて補正された前記アクチュエータの作動量である補正済作動量に基づいて、前記車両が直進走行状態となるように、前記左後輪と右後輪との少なくとも一方の転舵角が制御される状態で、前記傾き関連値検出部によって検出された値である検出傾き関連値と予め取得されて記憶されている前記車両が直進走行状態における前記傾き関連値である基準傾き関連値との差の絶対値が、第1しきい値より大きく、かつ、前記検出傾き関連値と前記基準傾き関連値との差の絶対値を前記転舵ロッドの移動量に換算した値が第3しきい値より小さい場合に、前記検出傾き関連値に基づいて前記補正済作動量を補正する請求項3に記載の作動量取得装置。
【請求項5】
前記後輪転舵システムが、前記転舵ロッドの位置である中立位置からの変位を検出するロッド位置検出部を含み、
当該作動量取得装置が、前記車両のメインスイッチがONからOFFに切り換わった場合に、前記作動量検出装置によって検出された前記アクチュエータの作動量に基づいて取得された前記転舵ロッドの位置であるOFF時ロッド位置と、前記メインスイッチがOFFからONに切り換わった場合に、前記ロッド位置検出部によって検出された前記転舵ロッドの位置であるON時ロッド位置との差の絶対値が、第2しきい値より大きい場合に、前記メインスイッチがOFFである場合に、前記転舵ロッドが外力によって移動させられたと判定する動かされ判定部を含む請求項1または2に記載の作動量取得装置。
【請求項6】
前記傾き関連値取得部が、前記傾き関連値として、
(a)前記車両に設けられた操舵操作部材の中立位置からの操作量と、
(b)前記車両の前方を撮像可能に搭載されたカメラの軸線の前記車両の進行方向に対する傾きとの少なくとも一方を検出するものである請求項1または2に記載の作動量取得装置。
【請求項7】
車両に搭載された車載システムのアクチュエータの作動量を検出する作動量検出装置と、
前記作動量と1対1に対応する物理量である第1物理量を検出する第1物理量検出装置と、
前記作動量を、前記第1物理量検出装置によって検出された前記第1物理量に基づいて補正する作動量補正部と
を含む作動量取得装置であって、
前記作動量補正部が、前記アクチュエータが、前記作動量検出装置によって検出された作動量に基づいて制御される状態で、前記車両が、予め定められた設定状態で走行している場合に、前記第1物理量検出装置によって検出された値に基づいて補正する作動量取得装置。
【請求項8】
当該作動量取得装置が、前記第1物理量とは別の物理量であり、かつ、前記作動量と1対1に対応する第2物理量を検出する前記第1物理量検出装置とは別の第2物理量検出装置を含み、
前記作動量補正部が、前記作動量検出装置によって検出された前記作動量を前記第2物理量に換算した値である第2換算値と、前記第2物理量検出装置によって検出された値である第2検出値との差の絶対値が、第4しきい値より小さい場合には、前記作動量を前記第2検出値に基づいて補正せず、前記第4しきい値以上である場合には、前記作動量を前記第2検出値に基づいて補正する請求項7に記載の作動量取得装置。
【請求項9】
車両の幅方向に延びて配設され、車輪に連結された転舵ロッドと、
前記転舵ロッドを前記幅方向に移動可能なアクチュエータと、
前記アクチュエータの作動量を検出する作動量検出装置と、
前記転舵ロッドの位置である前記転舵ロッドの中立位置からの変位を検出するロッド位置検出部と、
メインスイッチがONからOFFに切り換えられた場合に、前記作動量に基づいて取得される前記転舵ロッドの位置であるOFF時ロッド位置と、前記メインスイッチがOFFからONに切り換えられた場合に、前記ロッド位置検出部によって検出された前記転舵ロッドの位置であるON時ロッド位置との差の絶対値が第2しきい値より大きい場合に、前記作動量を、前記ON時ロッド位置に基づいて補正する作動量補正部と
を含む作動量取得装置。
【請求項10】
車両の幅方向に延びて配設され、車輪に連結された転舵ロッドと、
前記転舵ロッドを前記幅方向に移動可能なアクチュエータと、
前記アクチュエータの作動量を検出する作動量検出装置と、
前記転舵ロッドの位置である前記転舵ロッドの中立位置からの変位を検出するロッド位置検出部と、
メインスイッチがONからOFFに切り換えられた場合に、前記作動量に基づいて取得される前記転舵ロッドの位置であるOFF時ロッド位置と、前記メインスイッチがOFFからONに切り換えられた場合に、前記ロッド位置検出部によって検出された前記転舵ロッドの位置であるON時ロッド位置との差の絶対値が第2しきい値より大きい場合に、前記メインスイッチがOFFの間に、前記転舵ロッドが前記幅方向に外力により移動させられたと判定する動かされ判定部と
を含む転舵システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、アクチュエータの作動量を取得する作動量取得装置に関するものである。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
特許文献1に記載の転舵システムにおいて、実ヨーレートと前輪ヨーレートとの差が設定値より小さい場合、または、実ヨーレートと後輪ヨーレートとの差が設定値より小さい場合に、中立位置であると判定される。また、中立位置である場合の、ヨーレートに基づいて推定された推定操舵角と、操舵角センサによって検出された検出操舵角との偏差が記憶される。前記設定値は、しきい値からヨーレートセンサの誤差を引いた値である。操舵角とは、ステアリングホイールの操作角である。
【先行技術文献】
【特許文献】
【0003】
特開2017-197073号
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明の課題は、アクチュエータの作動量を取得する作動量取得装置において、作動量を良好に取得することである。
【発明の概要】
課題を解決するための手段、作用および効果
【0005】
本発明に係る作動量取得装置において、作動量検出装置によって検出された作動量に基づいてアクチュエータが制御される状態で、車両が予め定められた設定状態で走行している場合に、第1物理量検出装置によって検出された第1物理量に基づいて作動量が取得される。
【0006】
第1物理量の変化は作動量の変化に対して大きい。そのため、車両が設定状態で走行している場合の第1物理量に基づけば、作動量検出装置によって検出された作動量の妥当性を良好に取得することができる。以上のことから、車両が設定状態で走行している場合の第1物理量に基づいて作動量が取得されるようにすることにより、作動量を良好に取得することができる。
【図面の簡単な説明】
【0007】
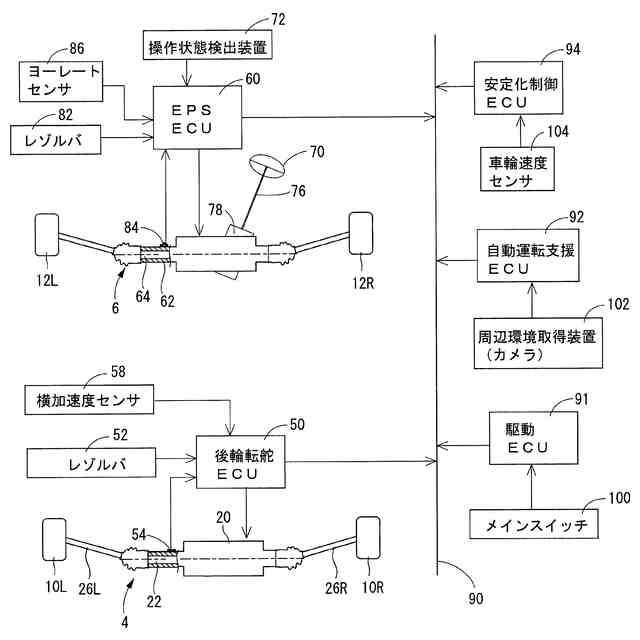
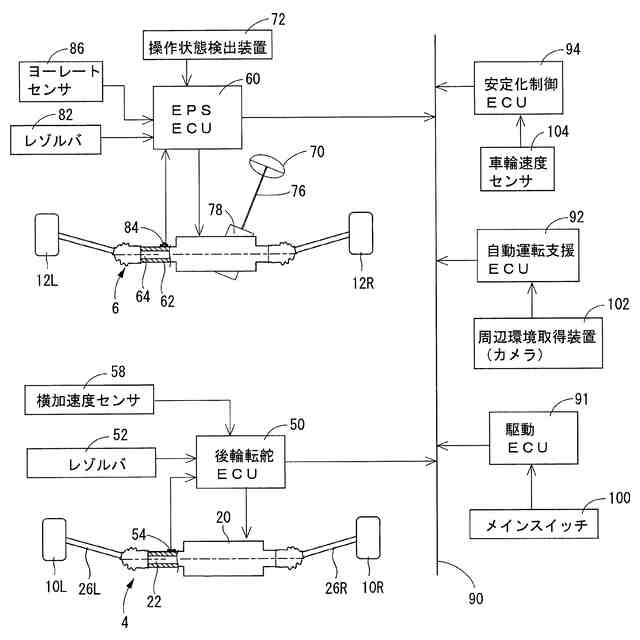
本発明の一実施形態に係る作動量取得装置の全体を概念的に示す図である。
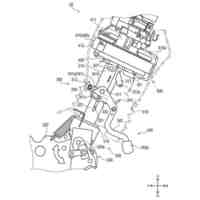
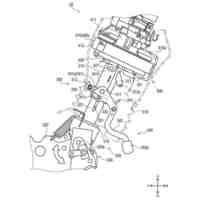
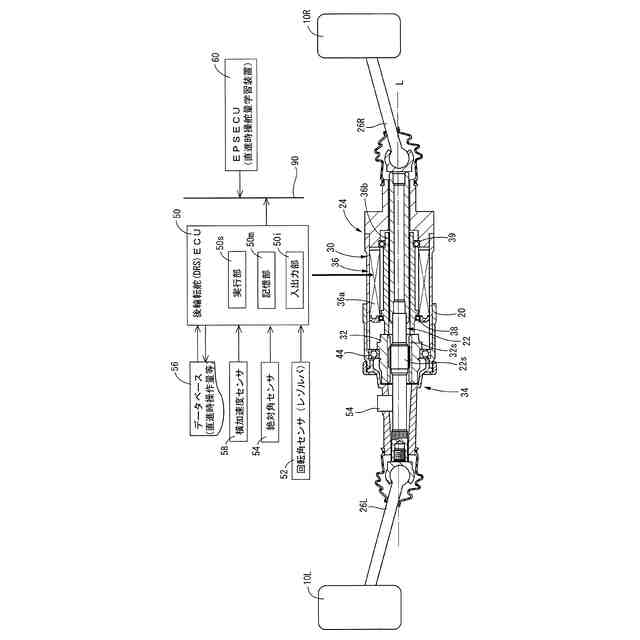
上記作動量取得装置の構成要素である車載装置を含む後輪転舵システムを概念的に示す図である。
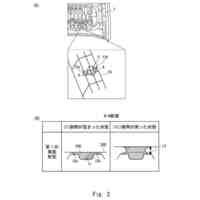
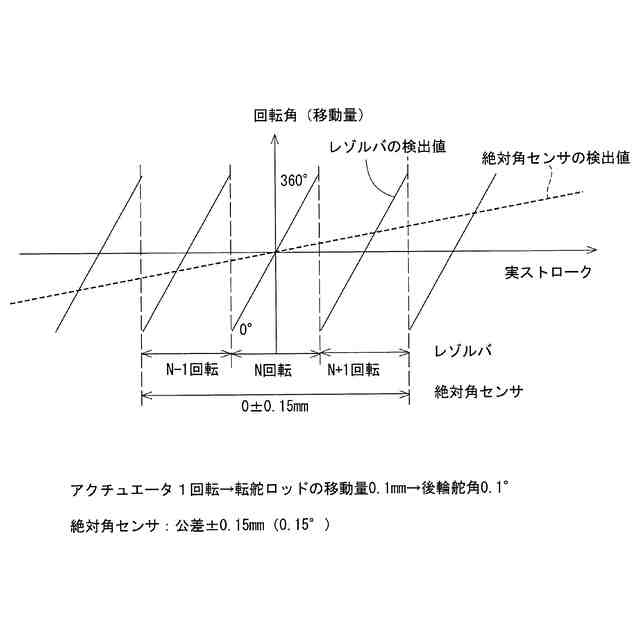
上記後輪転舵システムの車載装置におけるアクチュエータの回転数と転舵ロッドの位置の変化との関係を概念的に示す図である。
上記後輪転舵システムにおいて、右後輪と左後輪との転舵角と、車両の直進走行状態における操作操作部材の操作量との関係を概念的に示す図である。
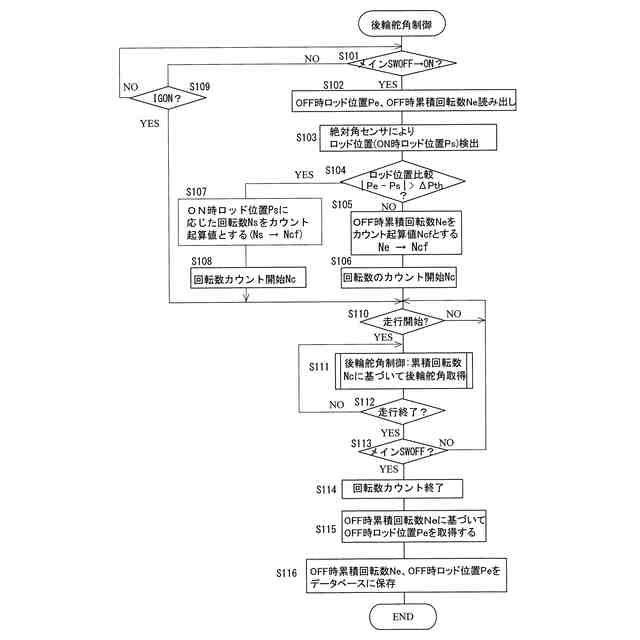
上記後輪転舵システムの記憶部に記憶された後輪舵角制御プログラムを表すフローチャートである。
上記作動量取得装置の記憶部に記憶されたアライメント調整プログラムを概念的に表すフローチャートである。
上記作動量取得装置の記憶部に記憶された作動量取得プログラムの一部を表すフローチャートである。
前記作動量取得プログラムの別の一部を表すフローチャートである。
上記作動量取得装置の記憶部に記憶された直進時操作量取得プログラムを表すフローチャートである。
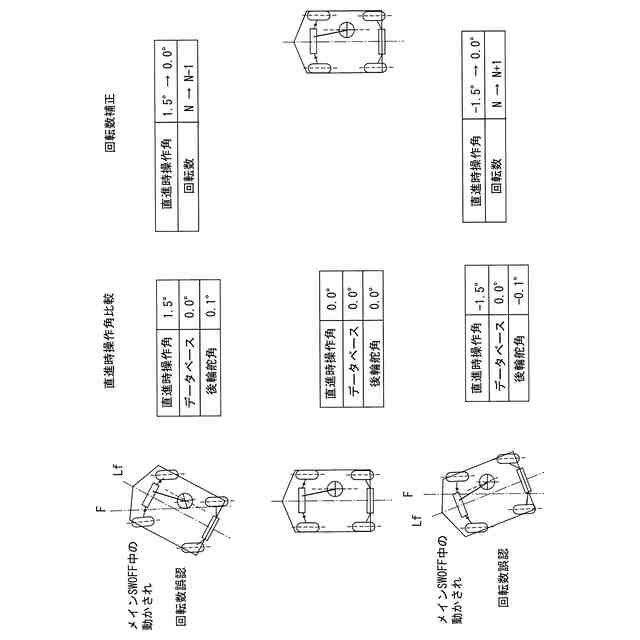
(10A)(10B)上記後輪転舵システムにおいて、後輪舵角制御中において、転舵ロッドの位置の調整が行われる場合の一態様を示す図である。
(11A)(11B)図9に示す場合とは別の一態様を示す図である。
車両の停止状態において、前記転舵ロッドの位置の調整を表す図である。
【発明を実施するための形態】
【0008】
以下、本発明の一実施形態に係る作動量取得装置を図面に基づいて説明する。本作動量取得装置は、車両に設けられた後輪転舵システムに含まれるアクチュエータの作動量を取得するものである。
【実施例】
【0009】
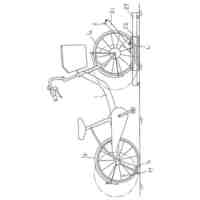
図1,2に示すように、車両は、後輪転舵(Dynamic rear steering)システム4、電動パワーステアリング(EPS:electric power steering)システム6等を含む。後輪転舵システム4は、左後輪10Lおよび右後輪10Rを転舵するものである。電動パワーステアリングシステム6は、左前輪12Lおよび右前輪12Rを転舵するものである。
【0010】
以下、左後輪10Lおよび右後輪10Rを左右後輪10L,10Rと略称する。左前輪12Lおよび右前輪12Rを、左右前輪12L,12Rと略称する。電動パワーステアリングシステム6を、EPSシステム6と略称する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
乗り物
27日前
個人
発音装置
3か月前
個人
折り畳み自転車
6か月前
個人
電動モビリティ
3か月前
個人
自転車用傘捕捉具
7か月前
個人
体重掛けリフト台車
6か月前
個人
自由方向乗車自転車
3か月前
個人
自転車用荷台
10か月前
個人
自転車用荷物台
6か月前
個人
キャンピングトライク
4か月前
個人
アタッチメント
7か月前
個人
ステアリングの操向部材
9か月前
個人
ステアリングの操向部材
4か月前
株式会社CPM
駐輪機
7か月前
株式会社三五
リアサブフレーム
6か月前
三甲株式会社
台車
9か月前
三甲株式会社
台車
9か月前
株式会社豊田自動織機
産業車両
2日前
ヤマハ発動機株式会社
車両
7か月前
ヤマハ発動機株式会社
車両
7か月前
ヤマハ発動機株式会社
車両
7か月前
ヤマハ発動機株式会社
車両
7か月前
ダイハツ工業株式会社
車両
8か月前
学校法人千葉工業大学
車両
5か月前
学校法人千葉工業大学
車両
5か月前
学校法人千葉工業大学
車両
5か月前
豊田合成株式会社
操舵装置
7か月前
コンビ株式会社
乳母車
1か月前
株式会社クボタ
作業車
1か月前
株式会社カインズ
台車
3か月前
株式会社オカムラ
搬送用什器
3か月前
トヨタ自動車株式会社
パネル
2日前
株式会社カインズ
台車
6か月前
個人
自転車の駐輪場システム
1か月前
株式会社クボタ
作業車
10か月前
株式会社クボタ
作業車
10か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ