TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025066278
公報種別
公開特許公報(A)
公開日
2025-04-23
出願番号
2023175745
出願日
2023-10-11
発明の名称
車両の運転支援装置
出願人
株式会社SUBARU
代理人
インフォート弁理士法人
,
弁理士法人イトーシン国際特許事務所
主分類
B62D
6/00 20060101AFI20250416BHJP(鉄道以外の路面車両)
要約
【課題】自車両を目標進行路に沿って走行させる際のフィードバック制御における収束時間の短縮化を実現できるようにする。
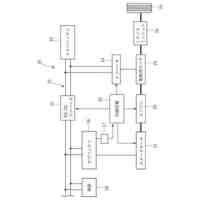
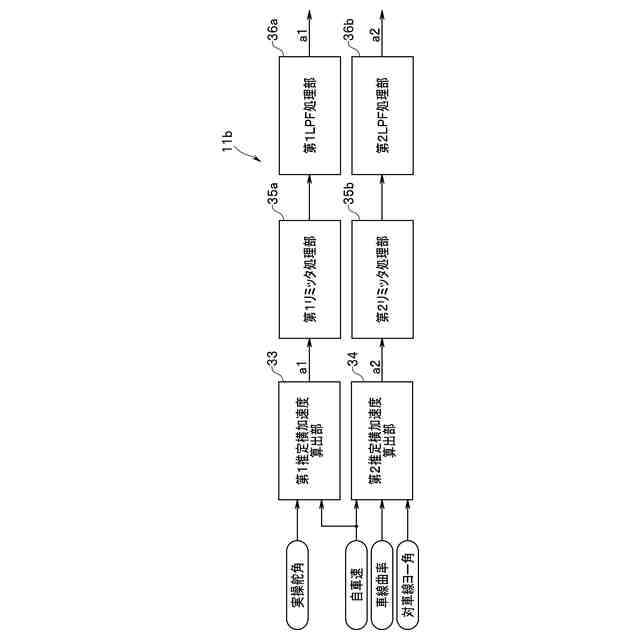
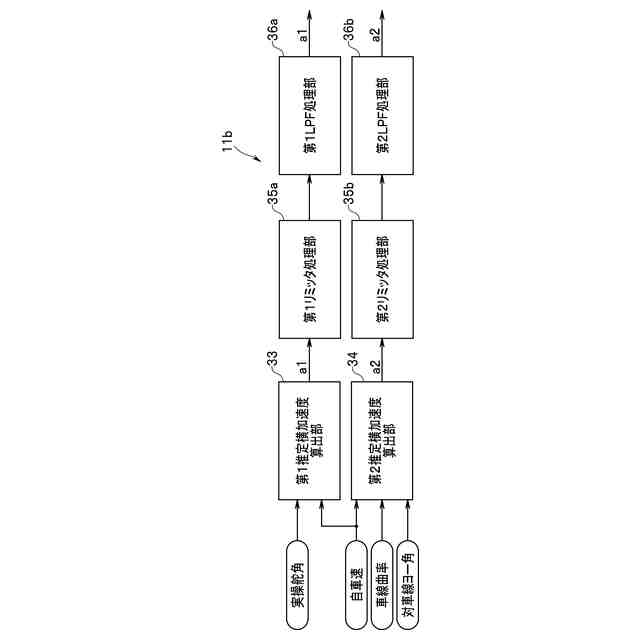
【解決手段】運転支援装置は、操舵支援制御部から出力される操舵角指示値の中立点を補正する中立点学習補正値を設定する中立点学習演算部を有する。中立点学習演算部は、操舵角と自車速とに基づいて第1推定横加速度を算出し、自車速と行環境認識部で認識した車線曲率及び対車線曲率とに基づいて第2推定横加速度を算出し、第1推定横加速度と第2推定横加速度との差分から横加速度差分を算出し、横加速度差分と自車速とに基づいて操舵角差分を算出し、この操舵角差分を前記中立点学習補正値として設定する。
【選択図】図4A
特許請求の範囲
【請求項1】
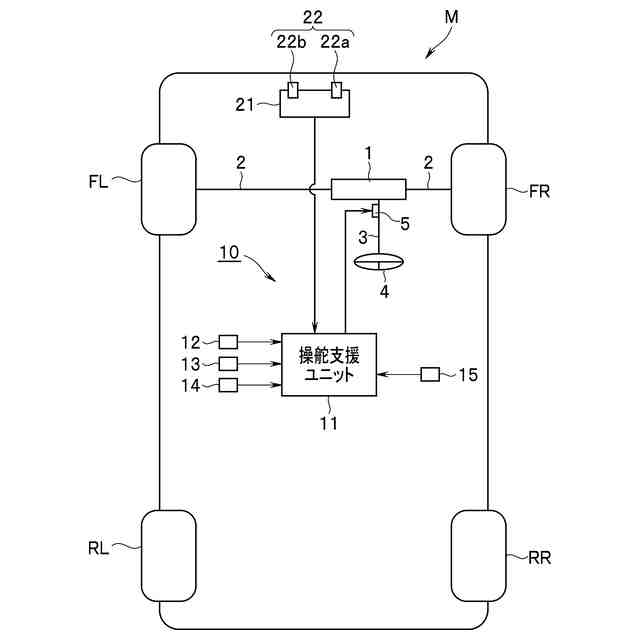
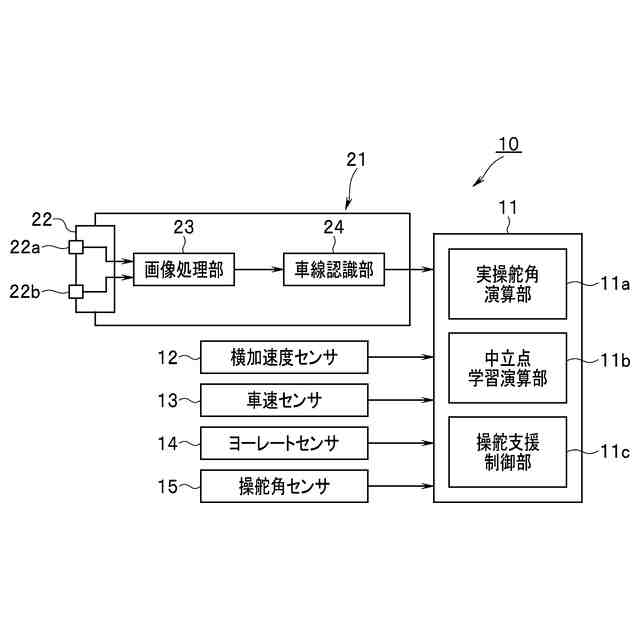
自車両の操舵角を検出する操舵角検出部と、
前記自車両の自車速を検出する車速検出部と、
前記自車両前方の走行環境を認識する走行環境認識部と、
左右の操舵輪を操舵する操舵駆動部と、
前記自車両を前記走行環境認識部で認識した車線曲率に沿って走行するように前記操舵駆動部に操舵角指示値を出力する操舵支援制御部と
を備える車両の運転支援装置において、
前記操舵支援制御部から出力される前記操舵角指示値の中立点を補正する中立点学習補正値を設定する中立点学習演算部を有し、
前記中立点学習演算部は、
前記操舵角と前記車速検出部で検出した前記自車速とに基づいて前記自車両が受ける第1推定横加速度を算出する第1推定横加速度算出部と、
前記車速検出部で検出した前記自車速と前記走行環境認識部で認識した車線曲率及び対車線曲率とに基づいて前記自車両が受ける第2推定横加速度を算出する第2推定横加速度算出部と、
前記第1推定横加速度算出部で算出した前記第1推定横加速度と前記第2推定横加速度算出部で算出した前記第2推定横加速度との差分から横加速度差分を算出する横加速度差分算出部と、
前記横加速度差分算出部で算出した前記横加速度差分と前記車速検出部で検出した前記自車速とに基づいて操舵角差分を算出する操舵角差分算出部と、
前記操舵角差分算出部で算出した前記操舵角差分を前記中立点学習補正値として設定する中立点学習補正値設定部と
を備えていることを特徴とする車両の運転支援装置。
続きを表示(約 700 文字)
【請求項2】
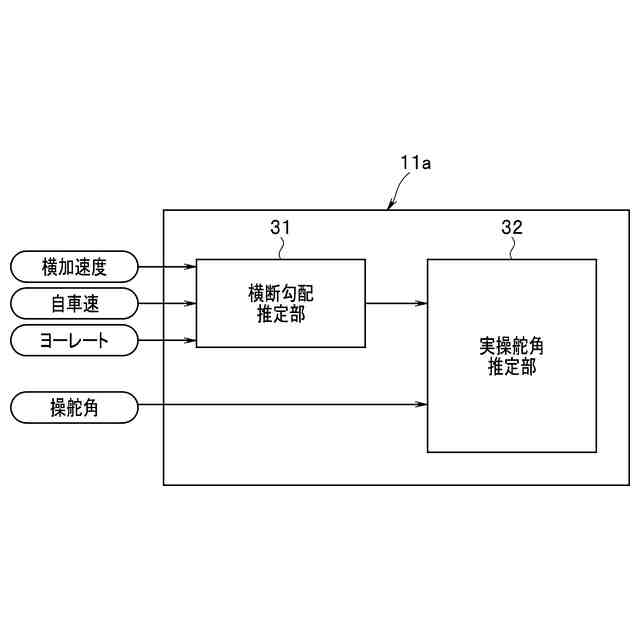
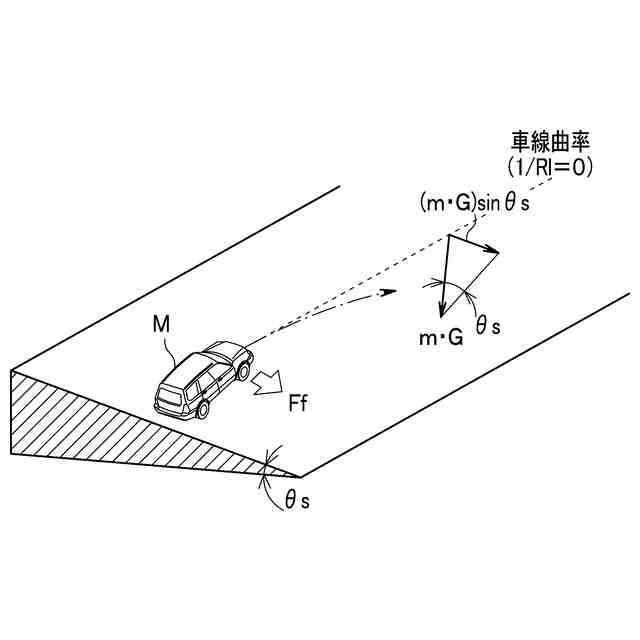
走行車線の横断勾配を推定する横断勾配推定部と、
前記操舵角検出部で検出した前記操舵角から、前記自車両が前記横断勾配を有する前記走行車線を走行した際の該横断勾配に抗う対抗舵角を減算して実操舵角を算出する実操舵角推定部と
を更に有し、
前記第1推定横加速度算出部は、前記実操舵角と前記自車速とに基づいて前記第1推定横加速度を算出する
ことを特徴とする請求項1記載の車両の運転支援装置。
【請求項3】
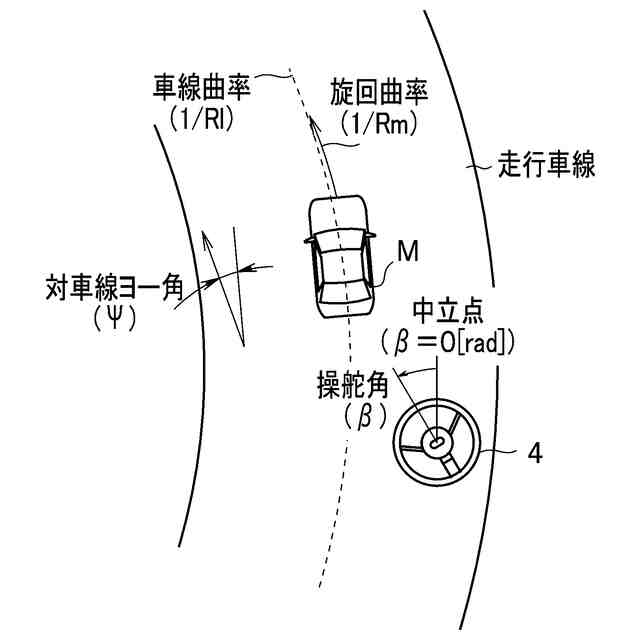
前記第1推定横加速度算出部は、前記実操舵角と前記自車速とに基づいて前記自車両の旋回曲率を設定し、該旋回曲率と前記自車速の二乗とを乗算して前記第1推定横加速度を算出する
ことを特徴とする請求項2記載の車両の運転支援装置。
【請求項4】
前記自車両の横加速度を検出する横加速度検出部を有し、
前記横断勾配推定部は、前記自車速にヨーレート検出部で検出したヨーレートを乗算した値から前記横加速度検出部で検出した横加速度を減算した値に基づいて前記横断勾配を算出する
ことを特徴とする請求項2記載の車両の運転支援装置。
【請求項5】
前記第2推定横加速度算出部は、前記自車速に前記車線曲率を乗算して車線ヨーレートを算出し、前記走行環境認識部で認識した走行環境に基づいて求めた車線に対する前記自車両の方向を示す対車線ヨー角を算出し、該車線ヨーレートと該対車線ヨーレートとを加算した値に前記自車速を乗算して前記第2推定横加速度を算出する
ことを特徴とする請求項1記載の車両の運転支援装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両の運転支援装置に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
近年、自動車を代表とする車両においては、ドライバの運転操作の負担を軽減するとともに、安全性の向上を実現することを目的として、ドライバの運転操作を支援するための運転支援装置が実用化されている。この運転支援機能の1つに自動操舵制御がある。自動操舵制御としては、車線逸脱抑制(LDP:Lane Departure Prevention)制御や車線維持(ALK:Active Lane Keeping)制御が知られている。このLDP制御やALK制御は、ステレオカメラ等の前方認識センサによって、自車両が走行する車線の左右を区画する区画線を認識し、自車両が区画線を逸脱することなく車線に沿って走行するように操舵制御するものである。
【0003】
自動操舵制御では、自車両が車線に沿って走行するように操舵装置を駆動させる。そして、この操舵装置の操舵角を操舵角センサで検出し、操舵角が目標操舵角に収束するようにフィードバック制御を行う。
【0004】
操舵角のフィードバック制御では、操舵角の中立点がずれていると、操舵角センサの検出値が実際の操舵角とずれてしまう。その結果、道路の曲率に対して、過剰或いは過小な操舵角となるフィードバック制御量を設定してしまうことになる。
【0005】
そのため、操舵角センサの中央点を常時学習する必要がある。例えば、特許文献1(特開2018-75946号公報)には、自車両が直線路を道路に沿って直進していると判定した場合、そのときの操舵角センサで検出した操舵角を中立点として学習する技術が開示されている。
【先行技術文献】
【特許文献】
【0006】
特開2018-75946号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
ところで、運転支援装置では、従来、電動パワーステアリング(EPS)装置の電動モータに対して指示操舵トルク(目標操舵トルク)を出力して操舵角を制御していた。これに対し、最近の運転支援装置は、EPS装置の電動モータに対する制御を、操舵トルク制御に代えて操舵角制御へ切り替える傾向にある。
【0008】
EPS装置の電動モータを操舵トルク制御から操舵角制御にて切り替えることで、応答性が向上する。操舵角制御は操舵角の中立点を基準に角度制御が行われる。そのため、操舵角の中立点を高い精度で学習させる必要がある。
【0009】
引用文献1に開示されている技術では、操舵角の中立点を、自車両が直線路に沿って直進している条件でのみ学習している。この条件では直線路の距離が短く、或いはカーブが連続する道路では、運転支援装置において操舵角の中立点を学習する機会が少なく、中立点を高い精度で学習させることが困難となる。
【0010】
その結果、運転支援装置が実行する車線逸脱抑制(LDP:Lane Departure Prevention)制御では、操舵角の中立点がズレていることにより、自車両が左右の区画線を逸脱した際の最大量に左右差が発生してしまう。又、運転支援装置が実行する車線維持(ALK:Active Lane Keeping)制御では、操舵角の中立点がズレていることにより、自車両を目標進行路に沿って走行させるためのフィードバック制御の収束性に左右差が生じてしまう不具合がある。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社SUBARU
航空機
17日前
株式会社SUBARU
車両の運転支援装置
3日前
株式会社SUBARU
車両の運転支援装置
4日前
株式会社SUBARU
車両の乗員監視装置
11日前
株式会社SUBARU
航空機用ドアユニット
10日前
株式会社SUBARU
ブローバイガス還流装置
5日前
株式会社SUBARU
電動車両の運転支援装置
12日前
株式会社SUBARU
車両通行帯違反通報システム
12日前
株式会社SUBARU
車載バッテリの充電制御システム
10日前
株式会社SUBARU
車載用ステレオカメラユニットの取付構造
10日前
株式会社SUBARU
内燃機関の制御装置及び内燃機関の制御方法
10日前
株式会社SUBARU
カムシャフトと補機との接続構造、および車両
10日前
株式会社SUBARU
車両のウォーターポンプ及びそれを備えた車両
13日前
個人
折り畳み自転車
4か月前
個人
電動モビリティ
1か月前
個人
発音装置
1か月前
個人
自転車用傘捕捉具
5か月前
個人
体重掛けリフト台車
5か月前
個人
自由方向乗車自転車
1か月前
個人
自転車用荷台
9か月前
個人
アタッチメント
6か月前
個人
キャンピングトライク
3か月前
個人
自転車用荷物台
5か月前
井関農機株式会社
作業車両
10か月前
個人
ステアリングの操向部材
3か月前
株式会社クラベ
面状ユニット
11か月前
個人
スライドレインプルーフ
11か月前
株式会社CPM
駐輪機
6か月前
個人
ステアリングの操向部材
8か月前
帝人株式会社
車両構造体
11か月前
三甲株式会社
台車
8か月前
三甲株式会社
台車
8か月前
株式会社三五
リアサブフレーム
4か月前
祖峰企画株式会社
平台車
9か月前
ヤマハ発動機株式会社
車両
6か月前
学校法人千葉工業大学
車両
4か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ