TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025063338
公報種別
公開特許公報(A)
公開日
2025-04-16
出願番号
2022033765
出願日
2022-03-04
発明の名称
重量予測装置、クレーン制御装置、クレーン、重量予測方法、および重量予測プログラム
出願人
カナデビア株式会社
,
国立大学法人 奈良先端科学技術大学院大学
代理人
弁理士法人 HARAKENZO WORLD PATENT & TRADEMARK
主分類
B66C
13/32 20060101AFI20250409BHJP(巻上装置;揚重装置;牽引装置)
要約
【課題】バケットを備えたクレーンによる堆積物の運搬の効率化。
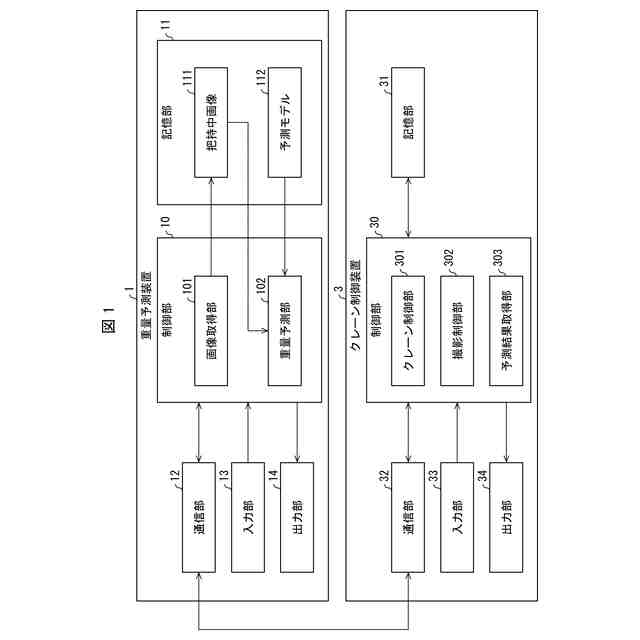
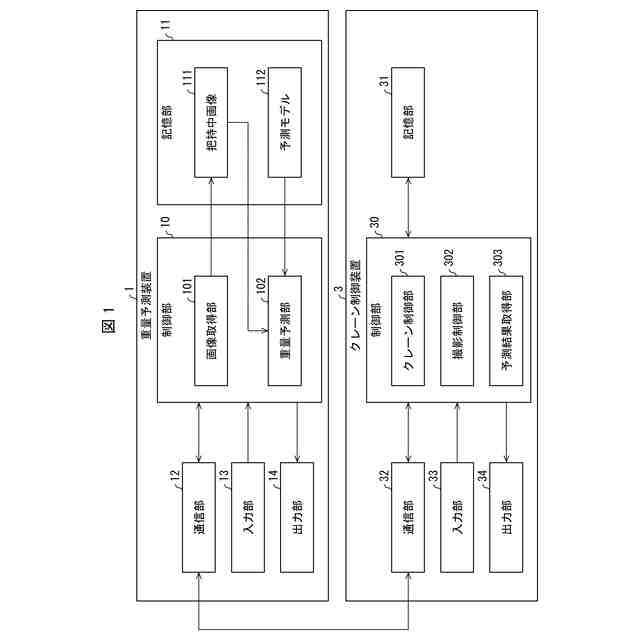
【解決手段】重量予測装置(1)は、把持開始から把持完了までの期間に撮影された対象物の把持中画像を取得する画像取得部(101)と、過去に行われた対象物の持ち上げの際に撮影された把持中画像と、持ち上げられた対象物の重量との関係を機械学習することにより構築された予測モデル(112)を用いて対象物の重量を予測する重量予測部(102)と、を備える。
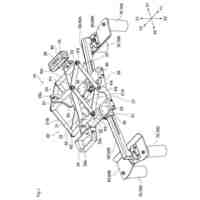
【選択図】図1
特許請求の範囲
【請求項1】
バケットを備えたクレーンにより堆積している対象物の一部を把持して持ち上げる際の、前記対象物の把持開始から把持完了までの期間に撮影された、前記バケットに把持される前記対象物の画像である把持中画像を取得する画像取得部と、
過去に前記クレーンまたは他のクレーンにより行われた前記対象物の持ち上げの際に撮影された前記把持中画像と、持ち上げられた前記対象物の重量との関係を機械学習することにより構築された予測モデルを用いて、前記把持中画像から、前記バケットにより持ち上げられる前記対象物の重量を予測する重量予測部と、を備える重量予測装置。
続きを表示(約 1,100 文字)
【請求項2】
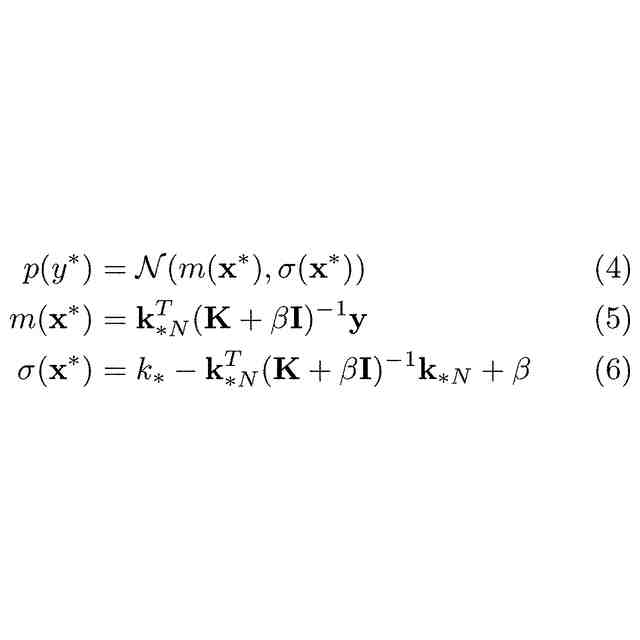
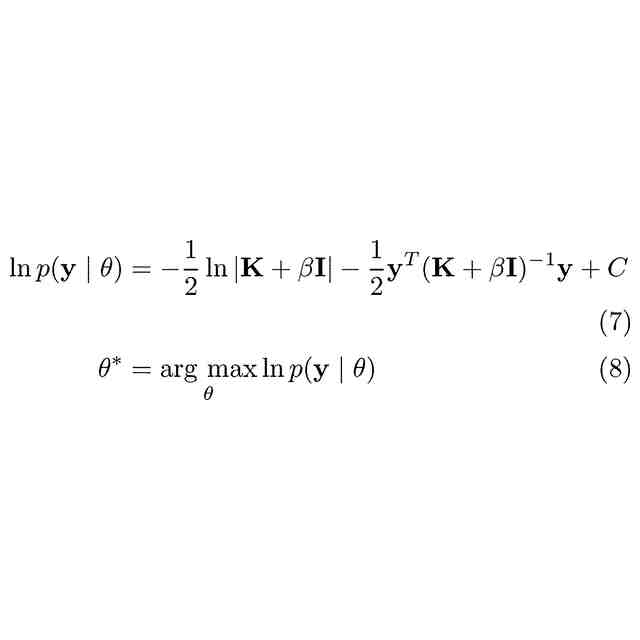
前記重量予測部は、前記把持中画像の特徴量を抽出する畳み込みニューラルネットワークと、前記特徴量から前記対象物の重量を推論するガウス過程とを組み合わせた前記予測モデルを用いて前記対象物の重量を予測する、請求項1に記載の重量予測装置。
【請求項3】
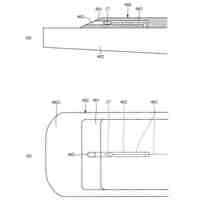
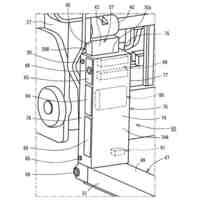
前記画像取得部は、前記バケットの内側に取り付けられた撮影装置により撮影された前記把持中画像を取得する、請求項1または2に記載の重量予測装置。
【請求項4】
前記期間に撮影装置を制御して前記把持中画像を撮影させる撮影制御部と、
前記期間の後、持ち上げられた前記対象物の実際の重量を特定する重量特定部と、
前記撮影制御部が撮影させた前記把持中画像と、前記重量特定部が特定した前記重量とを対応付けて、前記予測モデルの学習に用いる教師データを生成する教師データ生成部と、を備える請求項1から3の何れか1項に記載の重量予測装置。
【請求項5】
請求項1から4の何れか1項に記載の重量予測装置による重量の予測結果を取得する予測結果取得部と、
前記予測結果が所定の下限値以下である場合、および前記予測結果が所定の上限値以上である場合の少なくとも何れかの場合に、前記クレーンに前記対象物の掴み直し動作を行わせるクレーン制御部と、を備えるクレーン制御装置。
【請求項6】
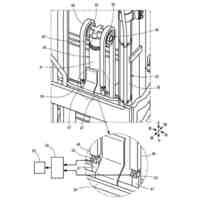
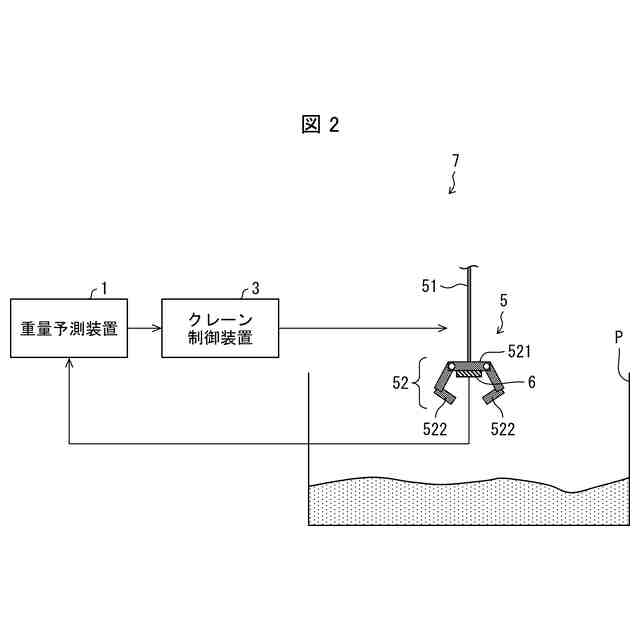
運搬の対象物を持ち上げるためのバケットの内側に、前記バケットにより堆積している対象物の一部を把持して持ち上げる際の、前記対象物の把持開始から把持完了までの期間に、前記バケットに把持される前記対象物の画像である把持中画像を撮影するための撮影装置が設けられたクレーン。
【請求項7】
1または複数の情報処理装置により実行される重量予測方法であって、
バケットを備えたクレーンにより堆積している対象物の一部を把持して持ち上げる際の、前記対象物の把持開始から把持完了までの期間に撮影された、前記バケットに把持される前記対象物の画像である把持中画像を取得する画像取得ステップと、
過去に前記クレーンまたは他のクレーンにより行われた前記対象物の持ち上げの際に撮影された前記把持中画像と、持ち上げられた前記対象物の重量との関係を機械学習することにより構築された予測モデルを用いて、前記把持中画像から、前記バケットにより持ち上げられる前記対象物の重量を予測する重量予測ステップと、を含む重量予測方法。
【請求項8】
請求項1に記載の重量予測装置としてコンピュータを機能させるための重量予測プログラムであって、前記画像取得部および前記重量予測部としてコンピュータを機能させるための重量予測プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、バケットを備えたクレーンにより持ち上げられる対象物の重量を予測する重量予測装置等に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
ごみ処理プラントに搬入されたごみは、ごみピットと呼ばれる貯留施設に一時的に貯留された後、焼却炉に送りこまれて焼却される。ごみピット内でのごみの運搬には、一般にバケットを備えたクレーンが用いられる。従来から、このようなクレーンの運転を自動化するための技術の開発が進められている。例えば下記の特許文献1には、バケットを備えたクレーンを自動制御してごみピット内のごみを撹拌させる技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特許第5185197号
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の自動制御は、クレーンのバケットにより常に同じ体積のごみが持ち上げられることを前提としたものである。しかしながら、実際にごみピット内でクレーンにごみを掴む動作を行わせた場合、持ち上げられるごみの体積や重量は一定しないことが多い。例えば、バケットを降ろした位置のごみが傾斜している場合や、押し固められて固まっている場合等には、バケットにより持ち上げられるごみの体積や重量は著しく少なくなることがある。
【0005】
そして、自動制御において、バケットにより持ち上げられたごみの量が少なかったことが分かるのは、バケットを吊るすワイヤに設けられた重量計により、持ち上げられたごみの重量が特定される段階、つまりごみが完全に持ち上げられた後である。そして、ごみの量が少なかったことが分かった後、バケットを開いて持ち上げたごみを放し、再度バケットを下ろしてごみの掴み直しを行う。このように、従来技術では、バケットで掴んだごみの量がごみを持ち上げるまで分からなかったことが、ごみの効率的な運搬の妨げとなっていた。これは、ごみの運搬に限られず、堆積している任意の対象物を、バケットを備えたクレーンで運搬する際に共通して生じる問題点である。
【0006】
本発明の一態様は、バケットを備えたクレーンによる、堆積している対象物の運搬を効率化することを可能にする技術を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記の課題を解決するために、本発明の一態様に係る重量予測装置は、バケットを備えたクレーンにより堆積している対象物の一部を把持して持ち上げる際の、前記対象物の把持開始から把持完了までの期間に撮影された、前記バケットに把持される前記対象物の画像である把持中画像を取得する画像取得部と、過去に前記クレーンまたは他のクレーンにより行われた前記対象物の持ち上げの際に撮影された前記把持中画像と、持ち上げられた前記対象物の重量との関係を機械学習することにより構築された予測モデルを用いて、前記把持中画像から、前記バケットにより持ち上げられる前記対象物の重量を予測する重量予測部と、を備える。
【0008】
また、上記の課題を解決するために、本発明の一態様に係るクレーンは、運搬の対象物を持ち上げるためのバケットの内側に、前記バケットにより堆積している対象物の一部を把持して持ち上げる際の、前記対象物の把持開始から把持完了までの期間に、前記バケットに把持される前記対象物の画像である把持中画像を撮影するための撮影装置が設けられている。
【0009】
また、上記の課題を解決するために、本発明の一態様に係る重量予測方法は、1または複数の情報処理装置により実行される重量予測方法であって、バケットを備えたクレーンにより堆積している対象物の一部を把持して持ち上げる際の、前記対象物の把持開始から把持完了までの期間に撮影された、前記バケットに把持される前記対象物の画像である把持中画像を取得する画像取得ステップと、過去に前記クレーンまたは他のクレーンにより行われた前記対象物の持ち上げの際に撮影された前記把持中画像と、持ち上げられた前記対象物の重量との関係を機械学習することにより構築された予測モデルを用いて、前記把持中画像から、前記バケットにより持ち上げられる前記対象物の重量を予測する重量予測ステップと、を含む。
【発明の効果】
【0010】
本発明の一態様によれば、バケットを備えたクレーンによる、堆積している対象物の運搬を効率化することが可能になる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
カナデビア株式会社
情報処理装置、分類モデルの生成方法、教師データの生成方法、学習プログラム、および教師データ生成プログラム
3日前
個人
懸吊装置
8か月前
ユニパルス株式会社
吊具
11か月前
個人
海上コンテナ昇降装置
5か月前
ユニパルス株式会社
荷役装置
4か月前
ユニパルス株式会社
吊具装置
6か月前
株式会社豊田自動織機
産業車両
6か月前
株式会社豊田自動織機
荷役車両
5か月前
水戸工業株式会社
吊り具
1か月前
株式会社豊田自動織機
荷役車両
4か月前
ユニパルス株式会社
リフト装置
2日前
株式会社豊田自動織機
荷役車両
10か月前
株式会社日本キャリア工業
昇降機
9か月前
白山工業株式会社
バランサ
2か月前
大栄産業株式会社
クランプ
10日前
ユニパルス株式会社
荷役助力装置
1か月前
株式会社キトー
タイヤ用吊具
29日前
株式会社ユピテル
システム等
1か月前
個人
建築部材の吊り上げ装置
7か月前
フジテック株式会社
エレベータ
4か月前
株式会社大林組
養生方法
8か月前
新英運輸株式会社
自動車用台車
28日前
株式会社豊田自動織機
フォークリフト
10か月前
株式会社豊田自動織機
フォークリフト
3か月前
株式会社キトー
吊具
8か月前
中坪造園有限会社
吊り荷降ろし具
3日前
小野谷機工株式会社
ジャッキ装置
10か月前
フジテック株式会社
エスカレータ
1か月前
白山工業株式会社
腕重量補償機構
7か月前
株式会社タダノ
高所作業車
7か月前
ウエダ産業株式会社
鋼板保持装置
9か月前
ブラザー工業株式会社
架台
11か月前
ブラザー工業株式会社
架台
11か月前
有限会社サエキ
玉掛用器具
5か月前
株式会社慧泉
搬送装置
10か月前
株式会社スギヤス
車両整備用リフト
5か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ