TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025062851
公報種別
公開特許公報(A)
公開日
2025-04-15
出願番号
2023172187
出願日
2023-10-03
発明の名称
行動確率推定装置及び交通安全支援システム
出願人
本田技研工業株式会社
代理人
弁理士法人クシブチ国際特許事務所
主分類
G08G
1/16 20060101AFI20250408BHJP(信号)
要約
【課題】運転支援の対象となる対象車両の運転者が交通状況に応じて実行し得る操縦行動の行動確率を、適切に推定する。
【解決手段】行動確率推定装置は、対象車両の周囲の交通参加者と対象車両との衝突リスクの大小の程度を表す数値であるリスク指標値を算出するリスク算出部と、リスク指標値と、対象車両の運転者の特性である運転者特性と、に基づいて、運転者が、予め定めた所定の操縦行動を対象車両において実行する確率である行動確率を推定する確率推定部と、を備え、運転者特性は、運転者の、自分の運転スキルについての自信の高低の程度を表す数値である自信レベル、及び危険と知りながら行動を敢行する傾向の大小の程度を示す数値である状況的敢行性レベルを含む。
【選択図】図3
特許請求の範囲
【請求項1】
対象車両の周囲の交通参加者と前記対象車両との衝突リスクの大小の程度を表す数値であるリスク指標値を算出するリスク算出部と、
前記リスク指標値と、前記対象車両の運転者の特性である運転者特性と、に基づいて、前記運転者が、予め定めた所定の操縦行動を前記対象車両において実行する確率である行動確率を推定する確率推定部と、
を備え、
前記運転者特性は、前記運転者の、自分の運転スキルについての自信の高低の程度を表す数値である自信レベル、及び危険と知りながら行動を敢行する傾向の大小の程度を示す数値である状況的敢行性レベルを含む、
行動確率推定装置。
続きを表示(約 1,500 文字)
【請求項2】
前記自信レベル及び前記状況的敢行性レベルは、前記運転者となる個人のそれぞれについて予め算出されて、前記運転者特性の一部として記憶装置に記憶される、
請求項1に記載の行動確率推定装置。
【請求項3】
前記運転者が現在抱いている不快な感情の大きさの程度を表す数値である感情レベルを算出する感情推定部を更に備え、
前記確率推定部は、前記運転者特性と、前記リスク指標値と、前記感情レベルと、に基づいて、前記行動確率を推定する、
請求項1に記載の行動確率推定装置。
【請求項4】
前記感情推定部は、前記運転者の生理データ及び又は前記運転者の行動スケジュールに基づいて、感情レベルを算出する、
請求項3に記載の行動確率推定装置。
【請求項5】
前記行動確率は、ロジスティック回帰モデル(ロジスティック関数)を用いて推定される、
請求項1に記載の行動確率推定装置。
【請求項6】
前記所定の操縦行動は、前記対象車両の走行レーンを変更するレーン変更行動である、
請求項1に記載の行動確率推定装置。
【請求項7】
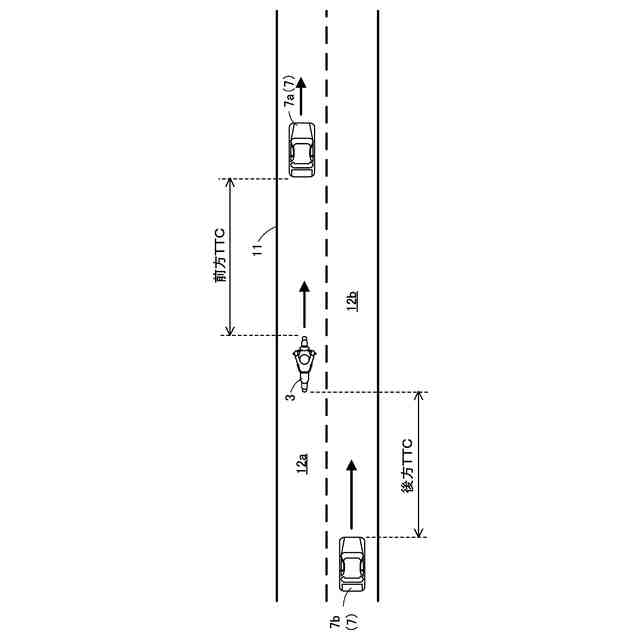
前記リスク指標値は、前記交通参加者である前記対象車両の前方を走行する前方車両と前記対象車両との間の衝突余裕時間である前方衝突余裕時間、及び、前記交通参加者である前記対象車両の後方を走行する後続車両と前記対象車両との間の衝突余裕時間である後方衝突余裕時間、により表される、
請求項1に記載の行動確率推定装置。
【請求項8】
前記対象車両は自動二輪車であり、前記後続車両は四輪自動車である、
請求項7に記載の行動確率推定装置。
【請求項9】
コンピュータが実行する、対象車両の運転者が所定の操縦行動を実行する確率である行動確率を推定する行動確率推定方法であって、
前記対象車両の周囲の交通参加者と前記対象車両との衝突リスクの大小の程度を表す数値であるリスク指標値を算出するリスク算出ステップと、
前記リスク指標値と、前記対象車両の運転者の特性である運転者特性と、に基づいて、前記運転者が、予め定めた所定の操縦行動を前記対象車両において実行する確率である行動確率を推定する推定ステップと、
を有し、
前記運転者特性は、前記運転者の、自分の運転スキルについての自信の高低の程度を表す数値である自信レベル、及び危険と知りながら行動を敢行する傾向の大小の程度を示す数値である状況的敢行性レベルを含む、
行動確率推定方法。
【請求項10】
請求項7又は8に記載の行動確率推定装置と、
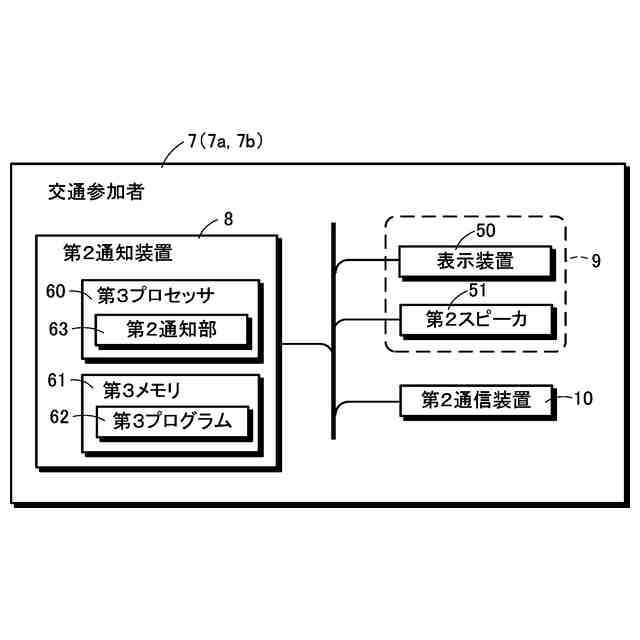
前記行動確率推定装置が推定した前記行動確率に基づいて、前記対象車両の運転者及び又は前記交通参加者に注意喚起の通知を行う通知装置と、
を備える交通安全支援システムであって、
前記通知装置は、
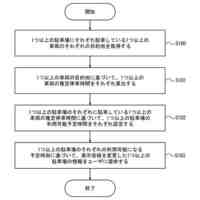
前記後方衝突余裕時間が、予め定めた第1時間閾値未満である場合において、
前記対象車両の前記行動確率が、予め定めた確率閾値未満であるときは、前記対象車両及び前記後続車両において第1レベルの注意喚起通知を行い、
前記対象車両の前記行動確率が、前記確率閾値以上であるときは、前記対象車両及び前記後続車両において前記第1レベルの注意喚起通知よりも顕著性レベルの高い第2レベルの注意喚起通知を行う、
交通安全支援システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、行動確率推定装置及び交通安全支援システムに関する。
続きを表示(約 3,500 文字)
【背景技術】
【0002】
近年、交通参加者の中でも脆弱な立場にある人々にも配慮した持続可能な輸送システムへのアクセスを提供する取り組みが活発化している。この実現に向けて運転支援技術に関する研究開発を通して交通の安全性や利便性をより一層改善する研究開発に注力している。
【0003】
特許文献1には、三者以上の複数の交通参加者が当事者となるリスクの回避を支援する交通安全支援システムが開示されている。この交通安全支援システムは、交通エリア内の自動二輪車、四輪自動車、及び歩行者群をそれぞれ交通参加者として認識し、自動二輪車及び四輪自動車の運転者の運転能力に関する情報に基づいて、自動二輪車の将来の振る舞いと、当該自動二輪車の将来の振る舞いに応じた四輪自動車の将来の振る舞いと、自動二輪車及び四輪自動車の少なくとも何れかの将来の振る舞いに応じた歩行者群の将来における連鎖リスクと、を予測する。
【先行技術文献】
【特許文献】
【0004】
国際公開第2023/089823A1号
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、運転支援技術においては、事故リスクが顕在化する前に運転支援を行うことが課題である。
本願は、上記課題の解決のため、対象車両の運転者が交通状況に応じて実行し得る操縦行動の行動確率を適切に推定することを目的としたものである。そして、上記推定した行動確率に基づいて、対象車両及び周囲の交通参加者に適切な警告を与え、延いては持続可能な輸送システムの発展に寄与するものである。
【課題を解決するための手段】
【0006】
本発明の一の態様は、対象車両の周囲の交通参加者と前記対象車両との衝突リスクの大小の程度を表す数値であるリスク指標値を算出するリスク算出部と、前記リスク指標値と、前記対象車両の運転者の特性である運転者特性と、に基づいて、前記運転者が、予め定めた所定の操縦行動を前記対象車両において実行する確率である行動確率を推定する確率推定部と、を備え、前記運転者特性は、前記運転者の、自分の運転スキルについての自信の高低の程度を表す数値である自信レベル、及び危険と知りながら行動を敢行する傾向の大小の程度を示す数値である状況的敢行性レベルを含む、行動確率推定装置である。
本発明の他の態様によると、前記自信レベル及び前記状況的敢行性レベルは、前記運転者となる個人のそれぞれについて予め算出されて、前記運転者特性の一部として記憶装置に記憶される。
本発明の他の態様によると、前記運転者が現在抱いている不快な感情の大きさの程度を表す数値である感情レベルを算出する感情推定部を更に備え、前記確率推定部は、前記運転者特性と、前記リスク指標値と、前記感情レベルと、に基づいて、前記行動確率を推定する。
本発明の他の態様によると、前記感情推定部は、前記運転者の生理データ及び又は前記運転者の行動スケジュールに基づいて、感情レベルを算出する。
本発明の他の態様によると、前記行動確率は、ロジスティック回帰モデルを用いて推定される。
本発明の他の態様によると、前記所定の操縦行動は、前記対象車両の走行レーンを変更するレーン変更行動である。
本発明の他の態様によると、前記リスク指標値は、前記交通参加者である前記対象車両の前方を走行する前方車両と前記対象車両との間の衝突余裕時間である前方衝突余裕時間、及び、前記交通参加者である前記対象車両の後方を走行する後続車両と前記対象車両との間の衝突余裕時間である後方衝突余裕時間、により表される。
本発明の他の態様によると、前記対象車両は自動二輪車であり、前記後続車両は四輪自動車である。
本発明の他の態様は、コンピュータが実行する、対象車両の運転者が所定の操縦行動を実行する確率である行動確率を推定する行動確率推定方法であって、前記対象車両の周囲の交通参加者と前記対象車両との衝突リスクの大小の程度を表す数値であるリスク指標値を算出するリスク算出ステップと、前記リスク指標値と、前記対象車両の運転者の特性である運転者特性と、に基づいて、前記運転者が、予め定めた所定の操縦行動を前記対象車両において実行する確率である行動確率を推定する推定ステップと、を有し、前記運転者特性は、前記運転者の、自分の運転スキルについての自信の高低の程度を表す数値である自信レベル、及び危険と知りながら行動を敢行する傾向の大小の程度を示す数値である状況的敢行性レベルを含む、行動確率推定方法である。
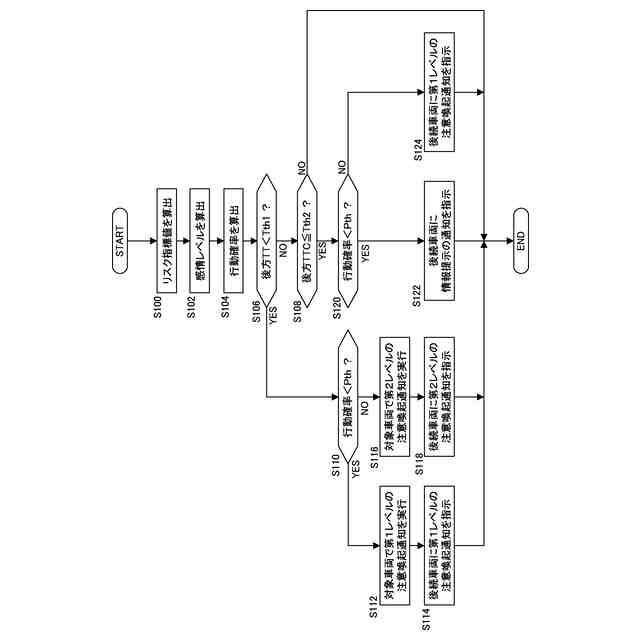
本発明の他の態様は、上記の行動確率推定装置と、前記行動確率推定装置が推定した前記行動確率に基づいて、前記対象車両の運転者及び又は前記交通参加者に注意喚起の通知を行う通知装置と、を備える交通安全支援システムであって、前記通知装置は、前記後方衝突余裕時間が、予め定めた第1時間閾値未満である場合において、前記対象車両の前記行動確率が、予め定めた確率閾値未満であるときは、前記対象車両及び前記後続車両において第1レベルの注意喚起通知を行い、前記対象車両の前記行動確率が、前記確率閾値以上であるときは、前記対象車両及び前記後続車両において前記第1レベルの注意喚起通知よりも顕著性レベルの高い第2レベルの注意喚起通知を行う、交通安全支援システムである。
本発明の他の態様は、前記通知装置は、前記後方衝突余裕時間が、前記第1時間閾値以上であって、且つ前記第1時間閾値より小さい、予め定めた第2時間閾値以下である場合において、前記対象車両の前記行動確率が、前記確率閾値未満であるときは、前記後続車両において前記対象車両の存在を示す情報提示の通知を行い、前記対象車両の前記行動確率が、前記確率閾値以上であるときは、前記後続車両において前記第1レベルの注意喚起通知を行う。
【発明の効果】
【0007】
本発明によれば、対象車両の運転者が、交通参加者との衝突リスクの程度に依存して所定の操縦行動を実行する行動確率を、その対象車両の運転者の性格などの特性を考慮して適切に推定することができる。
【図面の簡単な説明】
【0008】
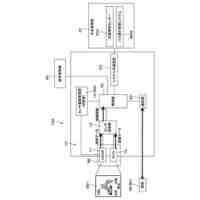
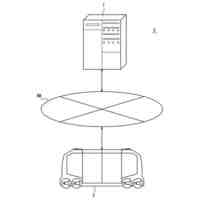
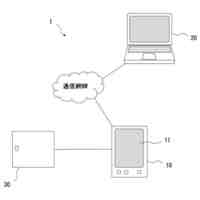
図1は、本発明の一実施形態に係る行動確率推定装置及び行動確率推定装置を含む交通安全支援システムの概要について説明するための説明図である。
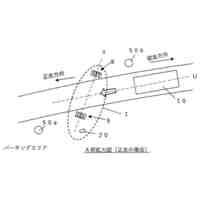
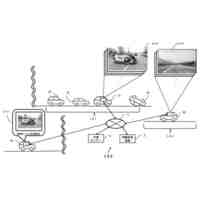
図2は、本実施形態の行動確率推定装置及び交通安全支援システムが動作する具体的な交通シーンの一例を示す図である。
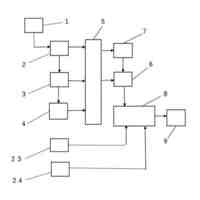
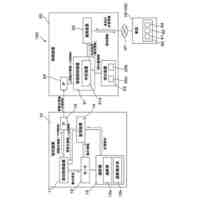
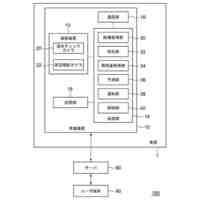
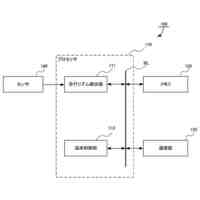
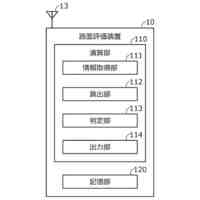
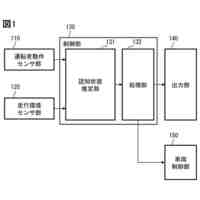
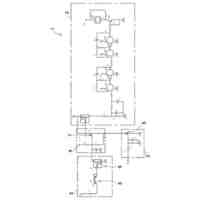
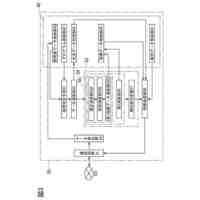
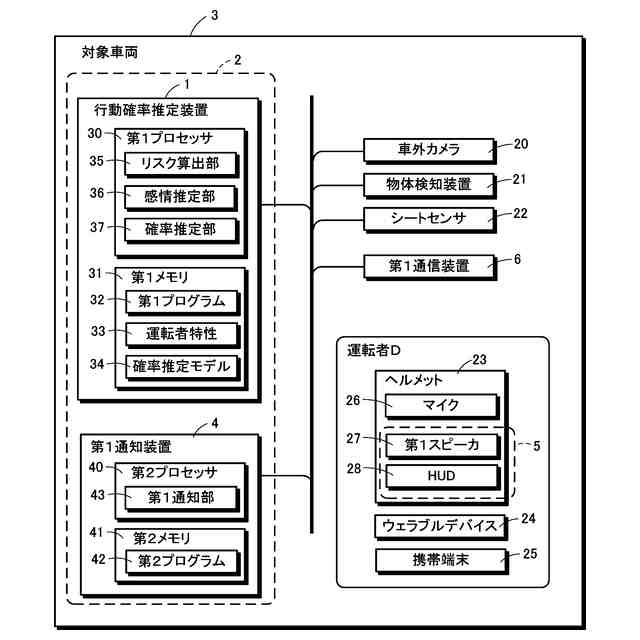
図3は、自動二輪車である対象車両に搭載された行動確率推定装置の構成及び行動確率推定装置を含む交通安全支援システムの構成を示す図である。
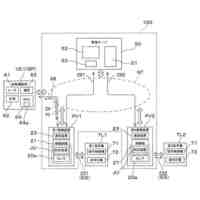
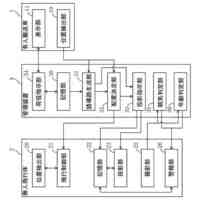
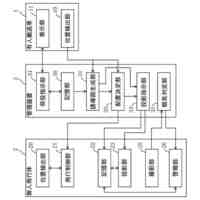
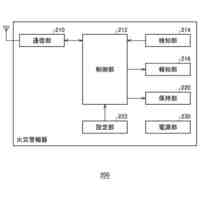
図4は、交通参加者における装置構成の一例を示す図である。
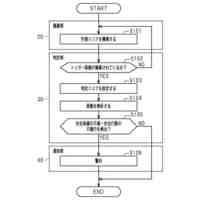
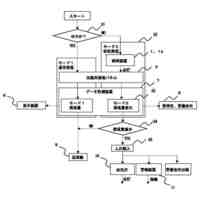
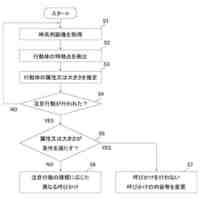
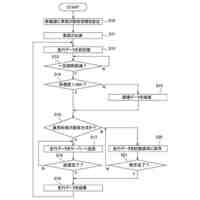
図5は、交通安全支援システムの動作の手順を示すフロー図である。
【発明を実施するための形態】
【0009】
以下、図面を参照して本発明の実施形態について説明する。
[1.概要]
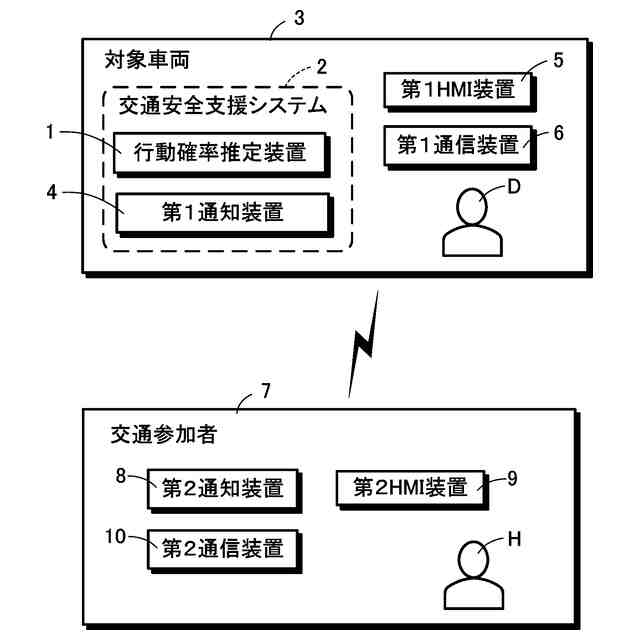
図1は、本発明の一実施形態に係る行動確率推定装置1及び行動確率推定装置1を含む交通安全支援システム2の概要について説明するための説明図である。
行動確率推定装置1及び交通安全支援システム2は、対象車両3に備えられる。
行動確率推定装置1は、対象車両3の運転者Dが、対象車両3の周囲の交通参加者7との衝突リスクの程度に依存して所定の操縦行動を実行する行動確率を推定する。本実施形態では、特に、行動確率推定装置1は、運転者の行動確率を、その運転者の性格などの特性を加味して推定する。
交通安全支援システム2は、行動確率推定装置1が推定した行動確率に基づき、対象車両3及び又は交通参加者7に通知を行うことで安全支援を行う。
【0010】
交通安全支援システム2は、対象車両3に備えられた行動確率推定装置1及び第1通知装置4を含む。第1通知装置4は、対象車両の運転者D及び又は交通参加者7に通知を行う。交通安全支援システム2は、第1通知装置4により、行動確率推定装置1が推定した行動確率に基づき、対象車両3において及び又は交通参加者7に対し、交通安全支援のための種々の通知を行う。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
安全運転車両
29日前
個人
黄色点滅式信号機
2か月前
個人
自動車ケアフル灯
26日前
個人
空飛ぶ自動車の空路
2か月前
個人
忘れ物検出装置
1か月前
個人
出会い頭事故防止装置
1か月前
能美防災株式会社
発信機
29日前
個人
逆走・正走車両検出システム
6日前
日本信号株式会社
情報提供システム
5日前
日本信号株式会社
情報管理システム
1か月前
株式会社島津製作所
警報装置
1か月前
ホーチキ株式会社
監視システム
1か月前
タック株式会社
安全監視システム
1か月前
株式会社JVCケンウッド
通知システム
1か月前
合同会社ORIC-LAB
太陽光発電管理装置
1か月前
株式会社SUBARU
車速制御システム
1か月前
三菱ロジスネクスト株式会社
搬送システム
29日前
三菱ロジスネクスト株式会社
搬送システム
29日前
三菱ロジスネクスト株式会社
搬送システム
29日前
本田技研工業株式会社
路面評価装置
1か月前
日本信号株式会社
路側装置及びセンサ装置
1か月前
本田技研工業株式会社
路面評価装置
1か月前
株式会社アジラ
注目行動呼びかけシステム
28日前
三菱ロジスネクスト株式会社
搬送システム
29日前
株式会社デンソー
運転支援装置
1か月前
河村電器産業株式会社
警報装置
1か月前
トヨタ自動車株式会社
方法
1か月前
能美防災株式会社
非常報知システム
13日前
株式会社 ミックウェア
情報処理装置、情報処理方法
1か月前
東亜電子工業株式会社
警報コントローラ
21日前
トヨタ自動車株式会社
車両
28日前
株式会社知財事業研究所
運行計画作成システム
1か月前
矢崎総業株式会社
路面監視装置
27日前
愛知時計電機株式会社
生活データ集計装置
27日前
日本宅配システム株式會社
入館管理システム
2か月前
パナソニックIPマネジメント株式会社
火災警報器
27日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ