TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025062789
公報種別
公開特許公報(A)
公開日
2025-04-15
出願番号
2023172046
出願日
2023-10-03
発明の名称
運転支援装置、運転支援方法及びプログラム
出願人
トヨタ自動車株式会社
代理人
弁理士法人プロスペック特許事務所
主分類
B62D
6/00 20060101AFI20250408BHJP(鉄道以外の路面車両)
要約
【課題】後方接近車両が存在する場合に自車両と後方接近車両とが衝突する可能性を低減可能な運転支援装置を提供する。
【解決手段】運転支援装置は、自車両が走行している走行領域を自車両が逸脱する可能性がある場合又は自車両が走行領域を逸脱した場合、走行領域からの逸脱を運転者に知らせるための逸脱警報及び自車両が走行領域を逸脱しないようにするために自車両を制御する車両制御の少なくとも一方を逸脱制御として実行する。運転支援装置は、逸脱制御の実行中に運転者が行った操舵操作に関連する操舵指標値が閾値以上であるとのオーバーライド条件が成立した場合、逸脱制御を実行せず、走行領域に自車両の後方から自車両に接近する後方接近車両が存在する場合、後方接近車両が存在しない場合と比べて、オーバーライド条件を成立し難くする。
【選択図】 図2
特許請求の範囲
【請求項1】
自車両が走行している走行領域を前記自車両が逸脱する可能性がある場合又は前記自車両が前記走行領域を逸脱した場合、前記走行領域からの逸脱を運転者に知らせるための逸脱警報及び前記自車両が前記走行領域を逸脱しないようにするために前記自車両の走行状態を制御する車両制御の少なくとも一方を逸脱制御として実行する運転支援装置において、
前記運転支援装置は、
前記逸脱制御の実行中に前記運転者が行った操舵操作に関連する操舵指標値が閾値以上であるとのオーバーライド条件が成立した場合、前記逸脱制御を中断又は終了し、
前記走行領域に前記自車両の後方から前記自車両に接近する後方接近車両が存在する場合、前記後方接近車両が存在しない場合と比べて、前記オーバーライド条件を成立し難くする、
ように構成された、運転支援装置。
続きを表示(約 1,400 文字)
【請求項2】
請求項1に記載の運転支援装置において、
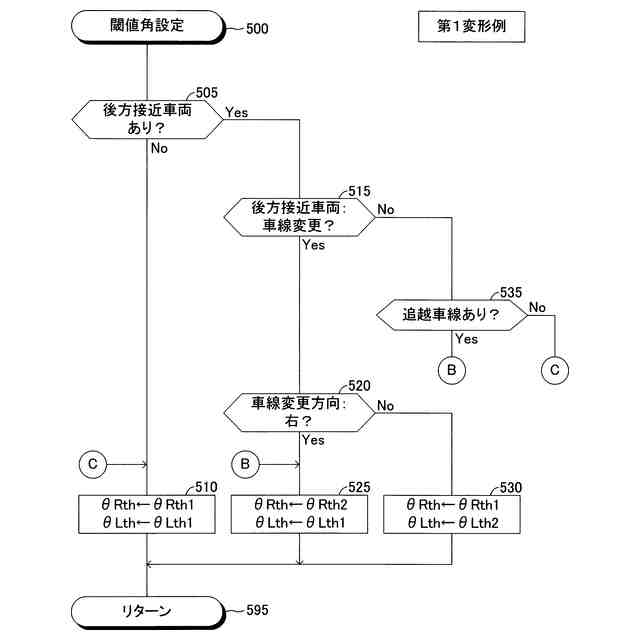
前記オーバーライド条件は、右側オーバーライド条件及び左側オーバーライド条件を含み、
前記運転支援装置は、
前記運転者が行った右側への操舵操作に関連する右側操舵指標値が前記閾値以上である場合、前記右側オーバーライド条件が成立したと判定し、
前記運転者が行った左側への操舵操作に関連する左側操舵指標値が前記閾値以上である場合、前記左側オーバーライド条件が成立したと判定し、
前記後方接近車両が存在し且つ前記後方接近車両が車線変更の意図を有する場合、前記右側オーバーライド条件及び前記左側オーバーライド条件のうち前記後方接近車両の車線変更先の車線側のオーバーライド条件を、前記後方接近車両が存在しない場合に比べて、成立し難くする、
ように構成された、運転支援装置。
【請求項3】
請求項2に記載の運転支援装置において、
前記後方接近車両が存在し且つ前記後方接近車両が車線変更の意図を有さない場合、前記自車両が追越車線と隣接する走行領域を走行していれば、前記右側オーバーライド条件及び前記左側オーバーライド条件のうち前記追越車線側のオーバーライド条件を、前記後方接近車両が存在しない場合に比べて、成立し難くするように構成された、
運転支援装置。
【請求項4】
自車両が走行している走行領域を前記自車両が逸脱する可能性がある場合又は前記自車両が前記走行領域を逸脱した場合、前記自車両に搭載されたコンピュータが、前記走行領域からの逸脱を運転者に知らせるための逸脱警報及び前記自車両が前記走行領域を逸脱しないようにするために前記自車両の走行状態を制御する車両制御の少なくとも一方を逸脱制御として実行する運転支援方法において、
前記運転支援方法は、
前記逸脱制御の実行中に前記運転者が行った操舵操作に関連する操舵指標値が閾値以上であるとのオーバーライド条件が成立した場合、前記コンピュータが前記逸脱制御を中断又は終了するステップと、
前記走行領域に前記自車両の後方から前記自車両に接近する後方接近車両が存在する場合、前記後方接近車両が存在しない場合と比べて、前記コンピュータが前記オーバーライド条件を成立し難くするステップと、
を含む運転支援方法。
【請求項5】
自車両が走行している走行領域を前記自車両が逸脱する可能性がある場合又は前記自車両が前記走行領域を逸脱した場合、前記自車両に搭載されたコンピュータに、前記走行領域からの逸脱を運転者に知らせるための逸脱警報及び前記自車両が前記走行領域を逸脱しないようにするために前記自車両の走行状態を制御する車両制御の少なくとも一方を逸脱制御として実行させるプログラムにおいて、
前記プログラムは、
前記逸脱制御の実行中に前記運転者が行った操舵操作に関連する操舵指標値が閾値以上であるとのオーバーライド条件が成立した場合、前記コンピュータに前記逸脱制御を中断又は終了させるステップと、
前記走行領域に前記自車両の後方から前記自車両に接近する後方接近車両が存在する場合、前記後方接近車両が存在しない場合と比べて、前記コンピュータに前記オーバーライド条件を成立し難くさせるステップと、
を含むプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、走行領域からの逸脱を運転者に知らせるための逸脱警報及び自車両が走行領域を逸脱しないようにするために自車両の走行状態を車両制御の少なくとも一方を逸脱制御として実行する運転支援装置、自車両に搭載されたコンピュータが逸脱制御を実行する運転支援方法、及び自車両に搭載されたコンピュータに逸脱制御を実行させるプログラムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
従来から、自車両が走行領域から逸脱する可能性がある場合又は自車両が走行領域から逸脱した場合、逸脱制御を実行する運転支援装置が知られている。例えば、特許文献1に記載の運転支援装置(以下、「従来装置」と称呼する。)は、運転者による操舵介入があったとのオーバーライド条件が成立した場合、上記逸脱制御を中断する。
【先行技術文献】
【特許文献】
【0003】
特開2003-81115号公報
【発明の概要】
【0004】
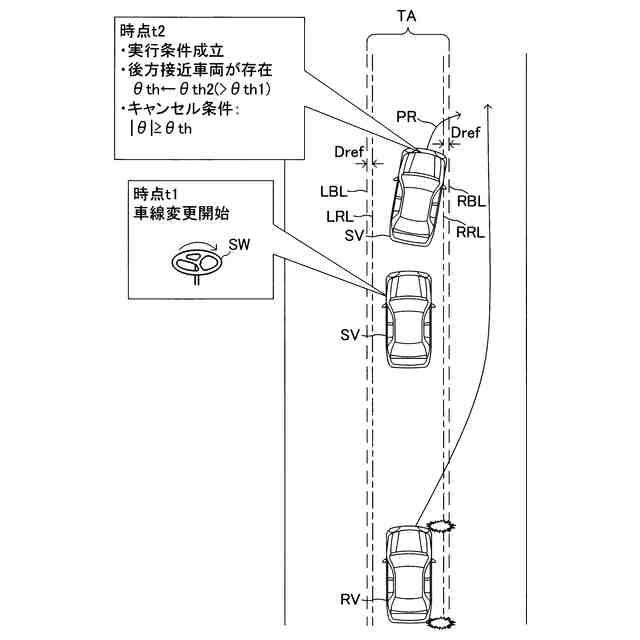
自車両が走行している走行領域において自車両の後方を走行し且つ自車両に接近する後方接近車両が存在する場合、後方接近車両は自車両を追い越すために車線変更を行う可能性がある。自車両の運転者はこのような後方接近車両に気付かずに車線変更を行う場合、走行領域を逸脱する可能性があるので逸脱制御が実行される。逸脱制御の実行後も運転者が車線変更のための操舵操作を行い続けると、従来装置は、操舵介入があったと判断して逸脱制御を中断する可能性が高い。このような状況下で逸脱制御が中断されると、自車両と後方接近車両とが衝突する可能性がある。
【0005】
本発明は前述した課題に対処するためになされたものである。即ち、本発明の目的の一つは、後方接近車両が存在する場合に自車両と後方接近車両とが衝突する可能性を低減可能な運転支援装置を提供することにある。
【0006】
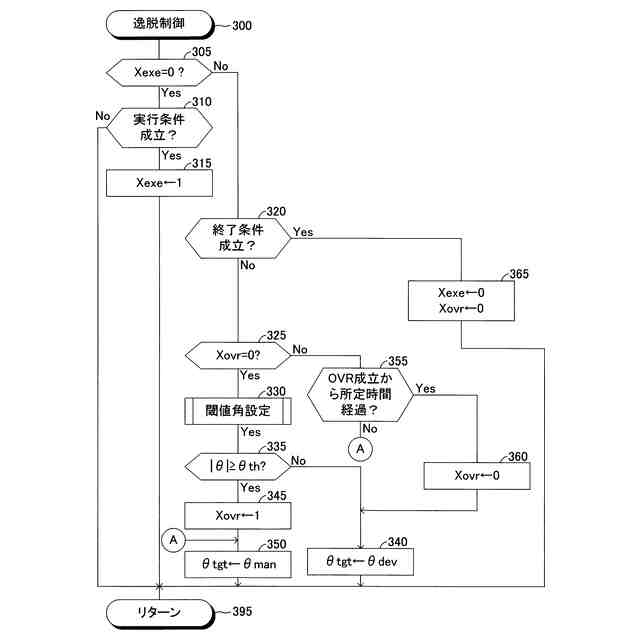
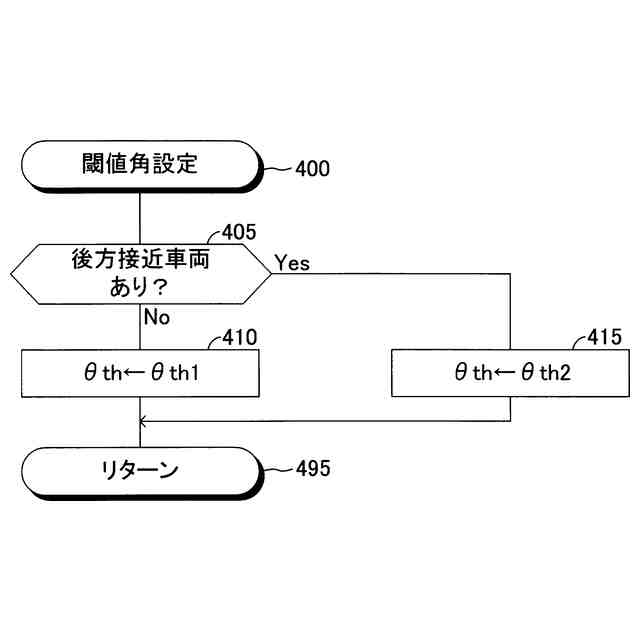
本発明の運転支援装置(以下、「本発明装置」と称呼する。)は、自車両(SV)が走行している走行領域(TA)を前記自車両が逸脱する可能性がある場合又は前記自車両が前記走行領域を逸脱した場合(ステップ310「Yes」)、前記走行領域からの逸脱を運転者に知らせるための逸脱警報及び前記自車両が前記走行領域を逸脱しないようにするために前記自車両の走行状態を制御する車両制御の少なくとも一方を逸脱制御として実行する(ステップ340)。
前記運転支援装置は、
前記逸脱制御の実行中に前記運転者が行った操舵操作に関連する操舵指標値が閾値以上であるとのオーバーライド条件が成立した場合(ステップ335「Yes」)、前記逸脱制御を中断又は終了し(ステップ350)、
前記走行領域に前記自車両の後方から前記自車両に接近する後方接近車両(RV)が存在する場合(ステップ405「Yes」)、前記後方接近車両が存在しない場合と比べて(ステップ405「No」)、前記オーバーライド条件を成立し難くする(ステップ415)、
ように構成されている。
【0007】
本発明装置によれば、後方接近車両が存在する場合、後方接近車両が存在しない場合と比べて、オーバーライド条件が成立し難くなる。後方接近車両は自車両を追い越すために車線変更を行う可能性が高い。本発明装置によれば、後方接近車両が行う(又は行っている)車線変更に自車両の運転者が気付かないで自車両が車線変更を行った場合に逸脱制御が中断される可能性を低減できる。よって、自車両と後方接近車両とが衝突する可能性を低減できる。
【図面の簡単な説明】
【0008】
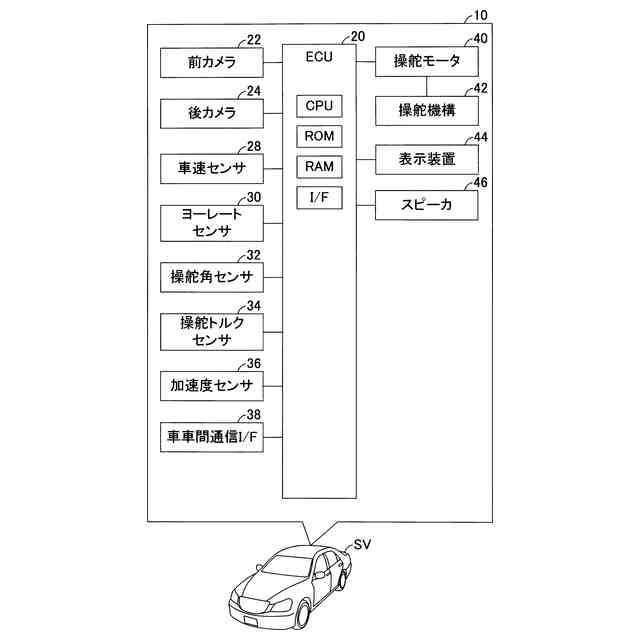
本発明の実施形態に係る運転支援装置の概略システム構成図である。
本発明の実施形態に係る運転支援装置の作動例の説明図である。
図1に示したECUのCPUが実行する逸脱制御ルーチンのフローチャートである。
図1に示したECUのCPUが実行する閾値角設定サブルーチンのフローチャートである。
本発明の実施形態の第1変形例に係る運転支援装置のECUのCPUが実行する逸脱制御ルーチンのフローチャートである。
【発明を実施するための形態】
【0009】
図1に示したように、本実施形態に係る運転支援装置10(以下、「本装置10」と称呼する。)は、自車両SVに適用され、図1に示した構成要素を備える。
【0010】
本明細書において、「ECU20」はマイクロコンピュータを主要部として備える電子式制御装置である。ECU20は、制御ユニット、コントローラ及びコンピュータとも称呼される。マイクロコンピュータは、CPU(プロセッサ)、ROM、RAM及びインタフェース等を含む。ECU20が実現する機能は、複数のECUによって実現されてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
発音装置
1か月前
個人
電動モビリティ
1か月前
個人
折り畳み自転車
4か月前
個人
自転車用傘捕捉具
5か月前
個人
自由方向乗車自転車
1か月前
個人
自転車用荷台
8か月前
個人
体重掛けリフト台車
4か月前
井関農機株式会社
作業車両
10か月前
個人
キャンピングトライク
2か月前
個人
アタッチメント
5か月前
個人
自転車用荷物台
5か月前
個人
ステアリングの操向部材
2か月前
個人
ステアリングの操向部材
8か月前
株式会社クラベ
面状ユニット
11か月前
個人
スライドレインプルーフ
11か月前
株式会社CPM
駐輪機
5か月前
祖峰企画株式会社
平台車
9か月前
三甲株式会社
台車
7か月前
株式会社三五
リアサブフレーム
4か月前
三甲株式会社
台車
7か月前
帝人株式会社
車両構造体
11か月前
豊田合成株式会社
操舵装置
6か月前
ヤマハ発動機株式会社
車両
6か月前
ヤマハ発動機株式会社
車両
6か月前
ヤマハ発動機株式会社
車両
6か月前
ヤマハ発動機株式会社
車両
6か月前
個人
足踏みペダル式自転車
11か月前
ダイハツ工業株式会社
車両
6か月前
豊田合成株式会社
ハンドル
12か月前
学校法人千葉工業大学
車両
4か月前
学校法人千葉工業大学
車両
4か月前
学校法人千葉工業大学
車両
4か月前
株式会社オカムラ
カート装置
12か月前
コンビ株式会社
乳母車
10日前
アルインコ株式会社
運搬台車
10か月前
アルインコ株式会社
運搬台車
10か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ